
0、引言
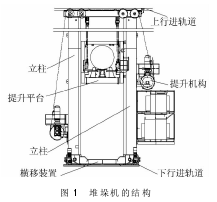
卷材高架仓储作为卷材物流的中转站,其位置设在卷材来往频繁的冷轧车间和精整车间之间。中铝瑞闽高精铝板带项目的卷材高架仓储采用3排架结构、2个巷道和3个堆垛机的方式实现卷材的存储和转运。堆垛机是卷材高架仓储系统的主要设备,卷材的出仓和入仓均通过堆垛机完成。堆垛机主要由横移装置、上横梁、2个立柱、升降平台和上下各2个行进轨道构成。堆垛机的结构如图1所示。
1、堆垛机横移装置的结构
1.1堆垛机横移装置机械部分的组成
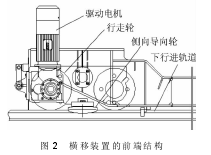
横移装置作为堆垛机底部的支撑,承受着卷材和整个堆垛机的重量。在横移装置的前端和后端各有一个行走轮,行走轮落在巷道内的下行进导轨上;每个行走轮的两侧各有一个侧向导向轮,与轨道的侧面直接接触,保证堆垛机在高速运行时稳定可靠、不偏离轨道。横移装置的结构如图2所示。
1.2堆垛机横移装置驱动部分的组成
堆垛机在轨道上的运行由横移装置完成,横移装置的前后2个驱动轮分别由1个78kW三相异步电动机进行驱动。为提高整个堆垛机的运行效率和精度,除横移装置外,堆垛机的提升机构和货叉的伸缩装置均采用西门子变频器进行传动控制;从节约成本的角度考虑,采用6SE70多传动系统,1个整流柜带4个逆变装置。横移装置的逆变器采用西门子6SE7033-2TG60,功率160kW,该传动同时驱动前后2个电机。
2、横移装置的定位
2.1横移装置定位的精度和速度
卷材高架仓储中的卷材存放位和货叉之间距离较小,要保证卷材在卷材存放位上起落平稳,要求堆垛机的横移定位精度在±5mm之内。卷材的转运速度主要取决于堆垛机的横移速度,因此横移最大速度设计为3m/s。因为堆垛机是在卷材高架库内的轨道上运行的,速度过高不利于突然减速时堆垛机的准确定位,尤其是在距离轨道两端较近的位置上速度不宜过高。为了不降低堆垛机的运行效率,采用中速运行,速度为0.67m/s。当堆垛机接近卷材目标位置时,横移装置以最低速度运行,开始进行横移定位。
2.2堆垛机在巷道中的位置测量
堆垛机横向定位的距离测量采用劳易测AMS200激光测距仪,该激光测距仪同时集成Profibus和SSI接口协议,测量精度在1mm内。激光测距仪固定在巷道入口的墙壁上,其反光板固定在堆垛机上。采用激光测距仪检测的方式能够保证测量精度,这种直接对移动物体进行测量的数据可靠性极大,不需要经过中间环节的处理。
激光测距仪通过Profibus-DP总线与主控制室中的西门子PLC相连,时刻测量堆垛机在巷道中的位置。
2.3卷材存储的操作方式
堆垛机的操作方式有手动、半自动和全自动3种。手动操作需要操作人员在堆垛机上操作,主要用于运行检修和故障处理;半自动操作只需要操作人员在控制室内输入相应的参数即可;全自动操作则是通过二级服务器直接将数据传送到PLC,不需要操作人员。
2.4横移位置定位的实现
在正常生产工作时,堆垛机的运行采用半自动或全自动模式。卷材的入库或出库为一个完整的流程,PLC控制系统将入库或出库分成2个部分:卷材从存放位到堆垛机称为半取、卷材从堆垛机到存放位称为半存。因此,卷材的存取过程就是根据指令执行半存和半取的过程。在半存和半取的过程中,堆垛机不断地在轨道上执行横移定位。
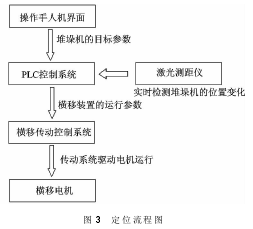
单个巷道全长为180m,在横移方向上共有57个卷材存放位,单个水平存放位的垂直方向上有5层的立式机构。在半自动运行模式下,操作人员在主控室内的人机界面输入堆垛机运行的目标位置,即具体的排架、水平的横移位置和垂直的提升位置。根据操作人员输入的具体参数和堆垛机在巷道内的实际位置,PLC内部的一个子程序计算得出在横移行程中堆垛机横移装置的启动速度、减速距离和定位距离,而这组数据通过Profibus-DP总线传送到传动中,进而控制电机的运行,实现横移装置的定位。具体定位流程如图3所示。
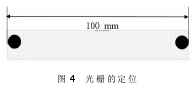
堆垛机在卷材高架仓储的横移定位中,依靠激光测距仪能够实现精确的距离测量。考虑到堆垛机横移定位的准确性对整个卷材高架仓储的安全运行至关重要,因此需要增加一个横移定位的判定条件。该系统在堆垛机横移装置上安装了2个反射型光栅,并将长度为100mm的反光条贴在与卷材存放位相对应的钢结构上。在横移位置上,57个卷材存放位都有各自相应的光栅反光条。堆垛机以中速运行到卷材存放位且系统检测到一个光栅信号时,堆垛机降速到0.033m/s开始定位,只有2个光栅都被系统检测到并实现最终定位,控制系统才会输出定位完成信号。光栅的定位如图4所示:
2个光栅的检测点均在反光条的边部,这种定位方式在增加横移定位判定条件的同时并未影响到激光测距仪的定位精度。
只有激光测距仪的定位和光栅的定位相互结合,才能保证堆垛机在横移定位上的准确和安全。
3、结语
本文主要介绍了卷材高架仓储中堆垛机横移装置的结构和定位精度,并阐述了在电气控制中实现横移定位的方案。激光测距仪作为常用的测量元件,通过总线与PLC实时传递数据,实现了横移装置的精确定位,光栅定位辅助使横移装置的定位更加安全。
参考文献:
[1]王晓辉.自动化立体仓库堆垛机控制系统的设计[J].制造业自动化,2002(9).
[2]吴润光.卷材立体自动存储系统高架仓库中堆垛机三维定位技术[J].轻合金加工技术,2012(3).
[3]劳易测AMS200激光测距仪使用说明书[Z].





