0 引言
我国的第十二个五年计划是从 2011 到 2015 年,确保国家粮食安全仍然是重中之重.随着人口数量、土地沙漠化面积的逐年增加及化肥的过度使用,可以耕种的土地面积正逐年减少.人口的增加使粮食的需求呈持续性增长的趋势,为确保粮食的生产安全,除增加耕种面积外,依靠科学技术,提高粮食作物的单产也是解决粮食紧缺问题的有效手段.而移栽技术在提高粮食单产的问题上,具有直播难以比拟的优越性.
育苗移栽技术具有对气候的补偿作用,能提高作物的复种指数[1 - 2],可将农作物的生育期提前 15 天左右,并有效地避免早春低温、倒春寒、霜冻、冰雹等气候的不良影响;避免虫害、干旱等自然灾害,提高幼苗成活率,确保每株农作物达到农艺要求;可以延长农作物的生育周期,增加积温,提高农作物的品质,进而有效地增加了单产的产量,为获得作物高产创造了有利条件.
在我国东北地区,无霜期比较短,温度变化较大.以玉米育苗栽植技术为例,该技术将玉米的播种期提前 30 天左右,增加 200℃ 左右的积温,令作物躲过干旱、虫害、霜冻等灾害.再者,应用育苗栽植技术的作物可提前成熟 10 天左右,避免了早霜等灾害,有利于玉米的单产产量的增加.在我国华北地区,采用一年两熟制,应用育苗栽植技术可以缓解两茬之间接茬的矛盾,在北京地区采用这种技术可以使夏玉米的产量达到 10 500 ~ 12 000kg/hm²,较未采用育苗移栽技术之前,产量提高了 1% ~2% 左右[3].
1 国外自动移栽机具的发展现状
国外自动移栽机具发展起步较早,且技术水平相对较高;但是,相比较其它的农业机械起步却较晚:20世纪 30 年代出现手工喂苗的移栽机,50 年代出现半自动移栽机,到 80 年代半自动移栽机已经被广泛的应用于生产实践当中,许多国家也已经研制出自动移栽机.由于移栽机的工作对象为柔软的农作物,致使移栽机构的参数众多,满足工作要求的移栽轨迹和姿态的目标函数也众多,且各个目标之间的关系比较复杂.而参数和各个目标之间的函数关系也比较复杂,耦合性较强,使得优化设计的难度大幅度提升.移栽机械的初期设计都是半自动型,由手工完成取秧、送秧这两个过程,仅栽插动作是依靠机构来完成.
在后续发明的移栽机械,目标相对简单,在水稻插秧机上首先完成了全自动的已在过程:由同一个分插机构完成取秧、输送和栽植 3 个动作.但是,无论是应用在水田还是旱田的钵苗移栽机,应用同一个移栽机构完成以上的 3 个动作,设计和优化难度相比较插秧机来说,大幅度提升.近 30 年来,全自动移栽机一直由3 套机构分别完成 3 个动作.以美国、加拿大、法国、意大利等为代表的大农业国家,因地广人稀,适合自动、高速、宽幅的大型农业机械以补偿劳动力不足等问题.
意大利法拉利公司生产的 FPC 型覆膜移栽一体化全自动移栽机(如图 1 所示),主要使用方形切块型压缩基质的苗钵,连同幼苗一齐栽入土壤中,成排喂苗,每列 10 株,夹钳与切块分离器同步动作,将每株苗钵插入苗孔中;膜上苗孔由机器按幼苗设定株距自动进行位移测量、定位和穿孔.借助精确的电子控制系统和数字键盘株距调控系统,塑料薄膜上定位孔处的薄膜被完全切除,有效地防止了因风鼓动薄膜导致的幼苗损伤.更突出的是与以往的覆膜机相比,该机对幼苗苗钵栽入土中的牢固程度大为改进,完全消除了栽后倒伏、根系接触不到实土而引起的死苗现象.(图1-6省略)
此种机型最高移栽速度为 5 000 株/行·h,行距为 28~ 112cm,最小株距 25cm,且连续可调,最大作业行数为 6 行,配套拖拉机为 58. 8kW.其适用花椰菜、茄子、长叶生菜、辣椒等蔬菜,以及棉花、烟苗等经济作物的移栽;但是缺点是只适用于方形压缩基质,基质体积较大,育苗成本较高.
以日本为代表的小农业,地块小、人口密度大,适合轻便、转向灵活、作业精巧的中、小型农业机械.
日本 TPA -1 型全自动蔬菜移栽机在构思、设计、工艺、调节等方面有很多独特之处.其采用专用苗盘供苗,1 人操作,可以实现全自动移栽.工作时,连杆机构将夹钳由水平位置向上旋转 90°,到水平位置时,夹钳夹住秧苗;当由水平位置再旋转 90°到垂直位置时,夹钳放开秧苗,秧苗掉落到开沟器所开的沟槽内,再经覆土轮覆土镇压.TPA - 1 型全自动蔬菜移栽机的株距可以在 22 ~ 77cm 之间调节;使用专用苗箱,营养钵为 4mm ×4. 6mm ×4. 6mm 的钵苗;扶手可以上下转动,并可以左右旋转 17°,前后旋转 180°,使得机械可以在不同角度和高度进行作业.
以美国、澳大利亚等的大农业生产方式和相应的农业机械,比较适合中国北方垦区和农村;而日本的小农业生产方式和所用的农业机械更适合中国南部地区和山区小地块作业[4].
2 国内移栽机具的发展现状
我国的移栽机具起步比较晚,开始于 20 世纪 50年代末,70 年代开始研制裸根苗移栽机,80 年代开始研制半自动移栽机.截止到目前,半自动移栽机也已经得到比较广泛的应用.
2. 1 国内半自动移栽机的发展现
国内的半自动移栽按照栽植机构的不同可以分为以下几类.
2. 1. 1 钳夹式移栽机
以吉林工业大学研制的 2ZT 型移栽机为代表的圆盘夹式移栽机,如图 2 所示.在工作时,人工将苗放到随栽植盘转动的秧夹上,当秧夹转到苗沟内,凸轮控制秧夹松开,秧苗落到苗沟内,覆土轮覆土,完成栽植.
以 2ZQ 型链夹式移栽机(如图 3 所示)为例:秧夹安装在链条上.在工作时,人工将苗放到秧夹上,链条由镇压轮驱动,秧夹进入滑道;当秧夹转到与地面垂直时,脱离滑道,秧夹打开,秧苗落入开好的沟中,覆土、镇压,完成栽植.
2. 1. 2 导苗管式移栽机
以中国农业大学研制的 2ZDF 型移栽机(如图 4所示)为例:人工分苗后,将秧苗投入到喂入器的喂入筒内;当喂入筒转到导苗管的上方时,喂入筒下面的活门打开,秧苗靠重力下落到导苗管内,通过倾斜的导苗管将秧苗引入到开沟器开出的苗沟内,在扶苗器的扶持下,秧苗呈直立状态;然后在开沟器和覆土镇压轮之间所形成的覆土流的作用下,进行覆土、镇压,完成栽植.
此类机型可以克服旋转式栽植器缺点,不伤苗、不埋苗,作业效率为 60 ~ 70 株/min,虽然较钳夹式有些提高,但是仍然无法满足高速作业要求.
2. 1. 3 挠性圆盘式移栽机
以乌盟农机研究所研制的 2ZT - 2 型甜菜移栽机为例(如图 5 所示):人工将秧苗放到输送带上,秧苗呈水平状态;当秧苗被输送到两个张开的挠性圆盘中间时,弹性滚轮将圆盘压合,秧苗被夹住,并随圆盘向下转动,转到秧苗与地面垂直时,圆盘脱离弹性滚轮,张开,秧苗落入沟内,覆土、镇压,完成栽植.
此类机型适合小株距作物,且结构简单,成本较低,但是作业效率在 40 ~ 50 株/min,耐久性差,仍然不适合大面积作业.
2. 1. 4 吊篮式移栽机
以南通公司研制的 2ZBX - 2 型钵苗移栽机为例(如图 6 所示):工作时,有驱动轮驱动栽植圆盘转动,吊杯与地面保持垂直,并随圆盘转动.当吊杯转到上面时,由人工将秧苗放入吊杯中;转到下面预定位置时,吊杯上的滚轮与导轨接触将吊杯鸭嘴打开,秧苗自由落入开沟器开出的沟内,随后覆土、镇压,完成栽植.
此类机型对秧苗无夹持力,不易伤苗,吊蓝在栽植过程中对苗提起扶持作用,直立度较好,喂苗速度在 30 ~ 50 株/min,但不适合高速、大面积作业[5].
2. 2 国内自动移栽机的发展现状
国内对自动移栽机研究较少,因为自动移栽机的取苗和分苗机构相对复杂,研究尚在起步阶段.由于作物的不同,自动化的移栽方式也大有不同,尚未见推广成型的机械.
从 20 世纪 80 年代开始,国内就有 10 家多单位开始研究水稻钵苗的全自动移栽装备.其中,中国农业大学宋建农教授研究的 2ZPY - H530 型水稻钵苗行栽机,设计巧妙、结构简单,且最接近产业化,如图 7 所示.
该钵苗移栽机采用对辊拔秧机构,实现水稻钵盘的自动输送和栽植两个个过程,机构原理如图 7 所示.2ZPY-H530 型水稻钵苗行栽机主要是由压秧板、输秧辊、上拔秧辊和下拔秧辊等组成.钵盘苗通过手工放置在托板上,并自动喂入到输秧辊上,拔秧辊和输秧辊按一定传动比转动;当上、下两个拔秧辊的夹秧板对接时,靠夹秧板外边缘的弹性材料变形而产生的夹紧力,将位于上、下拔秧辊中间的钵苗夹持并带动其一起运动,最后使得钵苗与钵盘脱离;当上下拔秧辊转过一定角度后夹秧扳松开,钵苗落入导苗管,完成拔秧工作.
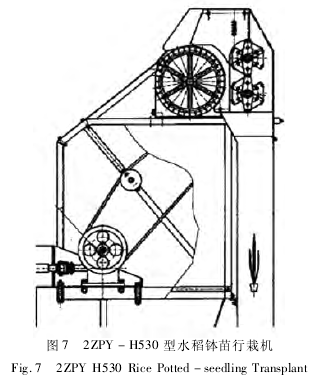
美国北卡罗莱纳州立大学生物与农业工程系黄国彦教授提出了空气整根营养钵育苗方法.吉林工业大学孙廷琮、马成林等在黄国彦教授的 8 项专利的基础上,研制了空气整根营养钵育苗及移栽系统.该机为中马力拖拉机驱动,悬挂式五行五投苗口,intel51系列单片微机控制的全自动移栽机(如图 8 所示).
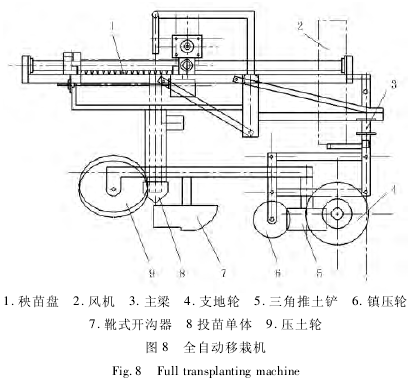
当秧盘上的钵腔对准投苗口时,投苗活门关闭,投苗腔体在风机的作用下,存在120mbar 的负压,钵苗和水一起被吸下,由传感器产生信号,将活门打开,钵苗和水一起被投到沟里,覆土、镇压完成栽植过程.此种移栽系统能够实现根系发达作物的小苗移栽[6 -7].单个投苗单体可移栽 85 株/min 左右,虽集拔秧、分秧和插秧于一个自动操作过程;但实现此过程的技术要求较高,机器的维护困难,使得机器的大面积推广带来了困难.
吉林工业大学的范云翔、杨子万等研制了温室全自动移栽机.移栽机的移行机构由步进电机控制,确保位置精度,而移栽机的全部工作由单片机控制,可以在一定的范围内遥控.其在实现移栽过程中将电学和机械学相结合,实现了全自动移栽.该机的关键部件是投苗机构,采用真空投苗装置,吸苗的活塞筒由两个气缸组成,在整个秧苗的下落过程中,应用流体力学和工程热力学,建立模型,计算相应参数并将其优化.移栽机使用的育苗秧盘最大为 600mm ×300mm,钵苗的钵腔最大为 30mm ×30mm 的空气整根秧盘.其虽然伤苗率小于 1% ,漏苗率在 2% 以下,可以适应多种尺寸的秧盘;但是移栽速率较低,大约为60 株 / min,秧盘的制作成本较高,在北方地块较大的农场,推广使用上受到一定限制[8].
沈阳工业大学包春江、李宝筏、包文育等采用空气整根育秧技术,提出气吸取苗和投苗的有序移栽方案.其由步进电机驱动齿轮齿条机构控制秧箱的移动,曲柄摆杆机构控制吸气活门,在投苗机构内部产生负压,由电磁铁控制单片机控制系统,使导苗管投苗活门按时按序完成或们的开启和关闭,实现投苗和送秧,完成栽植过程.在空气整根育苗 17 天、苗高11cm,钵体含水率 28% 的条件下,整机作业速度 0. 3m / s,落苗率 99% ,立秧率 98% ,行距 30. 0cm,株距(17. 1 + 24. 9)cm,生产率 0. 065hm²/ h,功耗小于2kW[9].华南农业大学马瑞峻、区颖刚、赵祚喜等提出 2 自由度机械手式有序移栽的设计方案.作业时,启动控制按钮,送秧电机将秧苗送至拔秧位;当传感器检测到秧苗后,发出电信号,电动机停止,机械手将秧苗拔起,送入到滑道,秧夹打开,秧苗落到田间,随后覆土、镇压,完成栽植过程[10].该方案设计的关键是送秧进给位置的确定以及秧苗的位置,为确保送秧进给量的精确性,机械手能够准确抓取秧苗,利用反射型光电传感器或者电磁传感器来检测秧苗的位置;但在机械手取秧的过程中,进给停止,降低了移栽速率.
3 发展与思考随着我国工业化进程的加快和农村经济水平的提高,农业劳动力的数量、素质和结构正在发生变化.农村劳动力大量向非农业产业转移,造成农业生产力数量减少,季节性劳动力不足.这种农业结构的变化局面对农业机械的需求种类和数量提出了更高的要求.发展与提高移栽机械的技术水平,笔者认为应该从以下几个方面入手:
1)农艺与农机有机地结合.研制栽植质量高的移栽机械,面临许多难题,单一从农艺或者机械方面入手,不能很好地解决问题.多学科的有机结合为问题的求解提供了一条有效途径.例如,大豆底荚漏割问题曾困扰我国多年.从农艺上,我国着名大豆育种专家王金陵教授培育出抗倒伏、底荚高的"东农四号"品种,解决大豆底荚低问题;从农机上,引进能够贴地仿型的挠性切割装置,从而解决因底荚低造成漏割损失问题,是农艺与农机双管齐下解决实际问题的典型[11].各个学科之间既要有协作又要有不同的分工,制作相应的行业标准,从秧盘的大小、钵苗高度、苗盘的运输等中间环节实现自动化、机械化,使育秧和移栽有机结合,从而形成系统的研究,实现育苗和移栽过程的全自动化.
2) 提高移栽机械的通用性和耐久性.由于各个作物的钵苗的钵盘不一致,没有统一的标准,钵苗大小也不一致,移栽机的栽植机构较固定,取苗单一,不能适应多种作物的移栽,使得移栽机的通用性较差.在研究过程中,需要充分考虑农业生产过程中环境的复杂性,设计上,保证能够在实现农业生产的基础上,结构应该尽量简单;材料上,使用新型复合材料,在保证机器的使用强度、刚度和过载保护的同时,减轻机器的质量和成本;工艺上,在经济允许的情况下,应该提高零件的精度,使用标准化零件,增强互换性.同时,注意从设计到样机加工完成中的各个问题,增加机器的耐久性和通用性.
3)发展自主创新的移栽机.在研究制造移栽机的过程中,一些企业和科研单位并不是在分析研究国外机型的基础上,大多数不是消化吸收外国机械的优点、摒弃缺点,而是简单地仿制各种机型.东北农业大学赵匀教授研究水稻插秧机,并不是仿制日本的曲柄摇杆式和偏心齿轮型星系分插机构,而是在其基础上,取其精华,去其糟粕.为得到插秧轨迹,采用非圆齿轮式旋转分插机构,在步行式插秧机得到应用,并通过样机和产品的鉴定.在研制全自动移栽机过程中,发现国外的全自动移栽机将移栽分 3 步走:如意大利法拉利生产的另一种全自动移栽机,首先秧夹停在钵盘上方等待,顶出机构将钵苗从钵盘里顶出;与此同时秧夹夹住秧钵,旋转 90°,秧夹打开,将秧苗投入到滑道内,至此,完成移栽.移栽机工作过程像"车间"一样,整个机器也比较庞大.目前,利用非圆齿轮研制全自动移栽机,模仿手工移栽的轨迹,并取得一定的成果.国外的农业生产与土地情况与国内的不一样,使得移栽机不能在国内更好的推广使用,应该因地制宜的自主研发适应国内土地和气候条件的移栽机.
参考文献:
[1] 韩长杰,张学金,杨宛章,等. 自动移栽机技术现状与分析[J]. 新疆农机化,2011 (5):5 -6.
[2] 张会娟,胡志超,吴峰,等. 国内育苗移栽机概况与发展思考[J]. 江苏农业科学,2010 (6):570 -572.
[3] 卢永涛,李亚雄,刘洋,等. 国内外移栽机及移栽技术现状分析[J]. 新疆农机化,2011(3):29 -32.
[4] 封俊,顾世康,曾爱军,等. 中国玉米育苗栽植机械化的现状与问题[J]. 农业工程学报,1998,14(1) :108 -112.
[5] 于向涛,胡良龙,胡志超,等. 我国旱地移栽机概况与发展趋势[J]. 安徽农业科学,2012,40(1):614 -616.
[6] 张守勤,马成林,马旭,等. 钵苗移栽机械发展战略探讨[J]. 农业机械学报,1993,24(1) :107 - 108.
[7] 吴畏,孙松林,肖名涛. 我国移栽机械的现状与发展趋势[J]. 农业技术与装备,2013(12):7 -10.
[8] 耿 端阳,董越波. 鸭嘴 - 偏心轮式钵苗栽植器的设计[J]. 农机化研究,2009,31(12):100 -116.
[9] 蔡国华,曾爱军. 挠盘式栽植器的运动分析与设计准则[J]. 华中农业大学学报,2009,28(2) :253 - 256.
[10] 方宪法. 我国旱作移栽机械技术现状及发展趋势[J].农业机械学报,2010,26(1):35 -36.
[11] [日]木谷收. 21 世纪农业机械化[J]. 农业机械学会志,1997,59(6):4 -9.
[12] L S Guo,W J Zhang. Kinematic analysis of a rice trans-planting mechanism with eccentric planetary gear trains[J]. Mechanism and Machine Theory,2001,36 ( 11 ):1175 - 1188.
[13] Edathiparambil,Vareed Thomas. Development of a mecha-nism for transplanting rice seedlings[J]. Mechanism andMachine Theory,2002,37:395 - 410.
[14] 赵匀. 农业机械分析与综合[M]. 北京:机械工业出版社,2008.
[15] 赵匀. 机构数值分析与综合[M]. 北京:机械工业出版社,2005.
[16] 张冕,姬江涛,杜新武. 国内外移栽机研究现状与展望[J]. 农业工程学报,2012,28(2) :21 - 23.
[17] 孙廷琮,马成林,纪春千. 空气整根营养钵育苗及移栽系统技术的研究开发[J]. 农业工程学报,1991,7(2):86 - 91.
[18] 孙廷琮,杨子万,范云翔,等. 秧苗自动移栽机[P]. 1996- 03 - 27.
[19] 范云翔,杨子万,孙延琮,等. 温室全自动移栽机的研究开发[J]. 农业工程学报,1996,12(2):111 -115.





