0 引言
大蒜,别名胡蒜;百合科,多年生宿根草本,其嫩苗、花茎和鳞茎等均可食用,有增进食欲和抑菌、杀菌作用,同时作为蔬菜、调味品、保健品具有很高的经济效益.据中华商务网报道,我国是世界上最主要的大蒜生产国和出口国,大蒜常年种植面积约 60 万 hm²,产量 1 058 万 t 余,占全球 75% ,涉及到蒜农 500 多万户[1 - 3].
大蒜是劳动密集型栽培作物,除耕地、整地、灌溉环节能够利用机器外,其它工序基本由人工完成,尤以收获和栽种工序最为辛苦.近几年,随着农村劳动力转移,大蒜播种、收获用工紧缺,人工成本越来越高,致使大蒜生产成本居高不下,严重影响了大蒜产业的健康发展.从调研情况看,2013 年我国大蒜人工种植成本约 4 500 元/hm²,人工收获成本约 9 000 元/hm²(部分地区甚至高达 12 000 元/ hm²),加上种、肥等物化投入,总成本约 45 000 元/ hm²,而大蒜的产出因蒜价格的不稳定差距较大(有些年份甚至赔钱),严重影响了蒜农种蒜的积极性.实现大蒜机械化生产对于提高我国大蒜产业国际竞争力、减轻劳动强度和增加农民收入等具有重要意义.
本文对近年国内外大蒜播种机和收获机的研究进展情况进行了介绍,并对大蒜机械化发展思路进行了探讨,并根据生产现状,提出农艺农机融合、播种服务收获的发展思路.
1 大蒜播种机研究现状
为了方便机械作业,美国、法国、西班牙等发达国家多使用机器随机播种,不要求种植鳞芽朝上[4 -8].韩国现在常用压穴式同步大蒜播种机(如图 1 所示),先用压穴器压出半球面形蒜穴,然后将大蒜种体播到压出的蒜穴内,通过蒜穴内球面来实现大蒜鳞芽方向的控制[9].日本洋马推出 PH4R 型大蒜种植机(如图2 所示),人工投种于橡胶种穴,然后种穴盘向下平动,当贴近地面时,排钟推杆将蒜种插入土中.试验表明,该机存在着伤蒜、直立度低、种植过深、种植后形成陇间距过大等问题,不符合我国种植习惯.欧洲国家多采用转盘式排种器,随机播种,对大蒜是否直立栽种没有要求,如图 3 所示.圆弧型取蒜勺均布在转盘一侧,当取蒜勺运动到取种位置时,取蒜勺在旋转挡块的作用下打开取种,并在扭转弹簧的作用下随即将其夹紧,多余的种子被毛刷刷掉,落回到种箱.
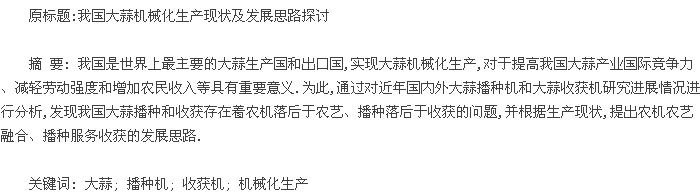
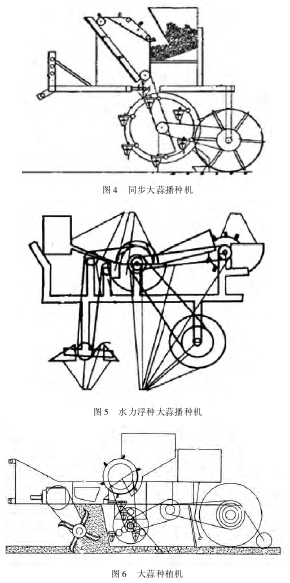
自 2008 年以来,国内对大蒜播种机械进行了大量的研究,并取得众多研究成果.以"大蒜播种机"为关键词在中国专利数据库进行检索,共检索到与大蒜播种机有关的发明专利 13 项,实用新型专利 32 项,(2012 年 15 项、2011 年 8 项、2010 年 5 项、2009 年 5项、2008 年 8 项).主要机型有金磊发明的一种大蒜播种机[10](如图 4 所示),采用链勺式单粒取种装置、鳞芽扶正装置和同步直立下栽装置,所采用的同步直立下栽装置能够较好地保证大蒜种体入土后的直立度;但由于大蒜种体形状的不规则,链勺式单粒取种装置无法满足单粒取种效果,另外采用的鳞芽扶正装置需要大蒜种体存在尖部,工作效果并不理想.李华峰 发 明 水 力 浮 种 大 蒜 播 种 机[11]( 专 利 号:ZL200820021828. 5),如图 5 所示.该发明创造性地提出利用水作为大蒜鳞芽方向控制的载体(利用大蒜种体重心靠下进行大蒜鳞芽方向控制),大蒜种体方向性控制较好,但所采用的取种装置和直立下载装置工作效果不理想.山东五征集团有限公司发明一种大蒜种植机[12],如图 6 所示.该机能够实现旋耕、撒药、播种、覆膜一体化,利用大蒜蒜尖小的特点进行大蒜制直立度控制;但实际工作过程中,很多大蒜蒜尖卷曲或者磨损掉,致使大蒜尖部朝下种植.(图1-5略)
综上所述,国内还没有成熟、满足农艺要求的大蒜播种机械出现,国外已有部分先进机具,要实现对大蒜栽种姿态的精确控制还需要进行进一步的研究与探索.目前,大蒜播种机主要存在以下问题:
1)大蒜种体形态不规则,并且颗粒较大、易伤,使大蒜单粒取种困难;2)大蒜种体形态不规则,使大蒜输送过程中鳞芽方向控制困难;3)工作不稳定,故障率较高.
2 大蒜收获机研究现状
西班牙、日本等发达国家大蒜收获已实现了机械化作业.日本洋马制造了 HZ1 型大蒜收获机(如图 7所示),可实现挖掘、输送、去土、切根、摘叶、收纳和搬运.西班牙 J. J. BROCH 公司生产的切秧式大蒜联合收获机(如图 8 所示),由分禾器将蒜秧导入夹持胶带,同时挖掘铲入土将大蒜根部挖松,大蒜由夹持胶带夹蒜秧输送;大蒜被夹持输送到切秧机构把蒜秧切掉后,大蒜头掉到横向输送链上,横向输送到袋内.其配套动力为 44. 1kW 拖拉机,行走速度为 3km/h,行距要求 40 ~ 55cm[13].国外产品价格较高、且不适合我国现有种植模式,不宜推广
我国大蒜种植以小户、小地块为主,有垄作模式、平作模式及套种模式,多样的种植模式致使收获机械机型多样,无法定型[14 -17].目前,国内大蒜收获机以挖掘式为主,有前置式、后置式,如图 9 所示.其采用机械挖掘方式收获时,仍需要人逐棵清理和收集,对劳动力的节省有限.
相对挖掘式收获机,挖拔式联合收获机能一次完成挖掘、清土、输送、果秧分离和集果等工序,是当前大蒜收获机械化的发展方向[18 - 19].2011 年,农业部南京农业机械化研究所研制了适于宽窄行种植模式的 4DBL -2 型自走式大蒜联合收获机[20],如图 10 所示.该机一次收获两行,采用全液压驱动技术,挖掘装置松土后,夹持输送装置将大蒜拔起,经过清土装置、对齐切秧装置和集果系统实现挖掘、清土、切切和收集一体化作业;但目前仍处于样机试验阶段,适于两种宽窄行种植模式,即 20cm(窄行距) ×40cm(宽行距)、20cm(窄行距) ×50cm(宽行距).
2010 年,山东省农业机械科学研究院 研制了4DSZ - 4 型自走式大蒜联合收获机[21],如图 11 所示.该机一次收获 4 行,整机侧向配置,全液压驱动,分上下两层布置,作业过程与 4DBL -2 型自走式大蒜联合收获机类似;但目前处于仍处于样机试验阶段,适宜于适于 4 行垄作种植模式,行距要求为 180mm.(图7-11略)
综上所述,国外大蒜收获机以挖拔式为主,技术已较为成熟;国内以挖掘式为主,挖拔式联合收获机还处于定型研究阶段,随着大蒜机械化生产进程的推进,适于一定栽培模式的挖拔式联合收获机是未来的发展方向.目前,大蒜机械化收获主要存在以下问题:
1)大蒜种植模式不规范、不统一,致使无法对行收获;2)由于抽薹过于靠下,致使大蒜倒伏严重,无法夹持收获;3) 大型大蒜联合收获机械价格较高,缺少小型大蒜联合收获机的研制.
3 发展思路探讨
1)农机农艺融合、播种服务收获.大蒜栽培模式不规范、不统一,是阻碍大蒜联合收获机设计和推广普及的主要因素.因此,突破传统上只从机械优化方面解决大蒜机械化生产难题的思路,根据国内大蒜种植习惯和大蒜联合获机对栽培模式需求,对大蒜标准栽培模式进行研究,得到不同栽培模式对蒜头产量及品质影响规律.同时,建立与经济效益对应的函数关系,使大蒜栽培模式评价更客观并具有可量化操作性,为大蒜实际生产提供指导,通过农机农艺融合的方法来加快大蒜机械化生产发展步伐.
2)重点技术突破.大蒜鳞芽方向控制是大蒜播种机设计的"瓶颈"问题,传统的设计方法主要集中在机械改进和优化方面.由于大蒜种体形态、大小不规则,这一关键技术问题一直没有得到有效解决.为此,提出以下思路:
(1)利用大蒜种体重心靠下这一稳定的物理特性,开展大蒜鳞芽方向控制装置研究,进行技术攻关;(2)对我国传统大蒜种植农艺要求的经济性进行深入研究,探索大蒜种植鳞芽朝向对蒜头产量及品质影响规律,并建立与经济效益对应的函数关系,为大蒜机械化播种提供新途径.
3)政策支持.大蒜种植相对于小麦、玉米、水稻等,其种植面积较小,农机市场不大.另外,国外同类机械不适合国内种植模式,在技术上可借鉴之处不多,造成大企业不愿做、小企业做不了.为实现大蒜机械化生产,需要政策给予以下支持:
(1)在科研基金上给予支持,对关键技术进行攻关;(2)对大蒜农机具进行补贴,扶持引导基层农机服务组织和农民购买先进、实用的大蒜播种、收获机械;(3)建立示范基地,实施辐射带动,积极做好大蒜机械化生产技术的示范推广工作.
参考文献:
[1] 孙永泰. 大蒜干制品的加工与出口[J]. 杭州食品科技,2005(3):35 - 36.
[2] 丁超. 我国大蒜出口现状及对策[J]. 中国蔬菜,2005(4) :1 - 5.
[3] 苏钦东. 大蒜生产与出口现状分析及展望[J]. 农产品加工,2008(3):53 -55.
[4] 郭毅,张祖立,于丽颖等. 大蒜播种机械的研究现状[J]. 农机化研究,2009,31(6):221 -223.
[5] 张会娟,胡志超,吴峰,等. 我国大蒜机械化种植与收获概况[J]. 江苏农业科学,2010,3:460 -461.
[6] 荐世春,王小瑜,马继春,等. 我国大蒜机械化收获技术研究现状[J]. 农业装备与车辆工程,2012,50(4):14 -17.
[7] 郭毅,张祖立,于丽颖,等. 大蒜播种机械的研究现状[J]. 农机化研究,2009,31(6):221 -223.
[8] 高迟. 大蒜播种机器人控制系统的研究[D]. 杨凌:西北农林科技大学,2010.
[9] 林悦香,尚书旗,杨然兵. 大蒜生产机械的现状与发展[J]. 农机化研究,2012,34(3):242 -245.
[10] 金磊. 大蒜种植机械设计[D]. 北京: 中国农业大学,2007.
[11] 李华峰. 大蒜播种机:中国,ZL 200820021828. 5[P].[2009 - 04 - 30].
[12] 李 瑞 川,李 政 平,孙 雪. 大 蒜 种 植 机: 中 国,ZL201010257073. 0[P].[2010 -01 -31.
[13] 于昭洋,胡志超,王海鸥,等. 大蒜收获机械研发现状及作业质量影响因素[J]. 中国农机化,2012(5):68 -71.
[14] 蒯杰,卢泽民. 江苏省大蒜种植和收获模式研究[J]. 江苏农业科学,2012,40 (2) :125 -126.
[15] 李秀云. 大蒜套作棉花种植技术[J]. 现代农业科技,2007( 11) :123 - 125.
[16] 王旭清,王法宏,任德昌,等. 作物垄作种植增产机理及技术研究进展[J]. 山东农业科学,2001( 3) : 41 - 45.





