摘要:随着枸杞种植业发展,研制智能化的枸杞采摘机械很有必要。文章在分析枸杞的果实特征和采摘环境后,设计一种新的枸杞采摘机械手,实验证明,该机械手可对枸杞果实进行准确采摘,节省人工成本,提高枸杞种植业的生产力。
关键词:枸杞; 采摘; 机械手; 设计;
作者简介: 李金彦(1982-),男,宁夏同心人,讲师,研究方向:机器人智能控制。;
基金: 宁夏高等学校科学研究项目(NGY2017271); 宁夏教育厅大学生创新创业项目(2018-26); 2018年宁夏教育厅实训中心项目(2018-3);
1、枸杞采摘机械手机械结构设计
枸杞采摘机械手主要由基座、固定片、第一手指、第二手指、第三手指、套筒、缓冲弹簧、套座、第一驱动连杆、第二驱动连杆、视觉相机、压力传感器组成。
基座设置在固定片下端;固定片连接在基座上端两侧;第一手指一端与套座铰连接,第一手指中下部与固定片一侧铰连接;第二手指一端与套座铰连接,第二手指中下部与固定片另一侧铰连接;第三手指一端与套座铰连接,第三手指中下部与固定片另一侧铰连接;套筒设置在基座上端,套筒位于固定片内侧;缓冲弹簧设置在套筒内部;套座连接在缓冲弹簧顶端;第一驱动连杆设置在套筒两侧,第一驱动连杆一端与套筒滑动连接,第一驱动连杆另一端与第二驱动连杆中部铰连接;第二驱动连杆一端与固定片下部铰连接;视觉相机固定在套筒顶面;压力传感器设置在第一手指侧部;枸杞采摘机械手基座呈圆柱状,基座顶端与缓冲弹簧固定连接;基座起到支撑作用,通过基座可以将机械手组装到采摘机械上。枸杞采摘机械手基座如图1所示[1].
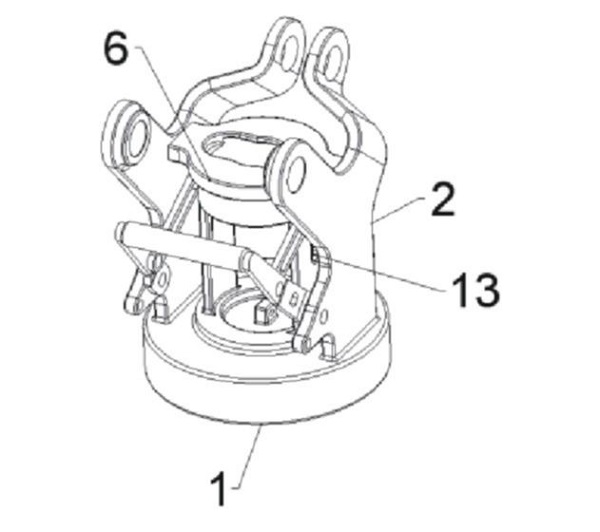
图1 枸杞采摘机械手基座
1.基座;2.固定片;6.套筒;13.条形孔
枸杞采摘机械手固定片呈Y型,固定片顶端与第一手指连接处向内弯曲,通过固定片将手指进行限位,各手指与固定片铰连接。枸杞采摘机械手俯视图如图2所示[2].
枸杞采摘机械手第一手指位于第二手指和第三手指之间,第一手指、第二手指和第三手指呈弯曲状,第一手指、第二手指和第三手指相互捏合。各手指采用仿真设计,模拟实际手指,采摘过程中夹持效果较好[3].
2、枸杞采摘机械手控制系统设计
枸杞采摘机械手的视觉相机设置在套筒顶面,位于第二手指和第三手指一侧,与单片机连接。视觉相机采用工业智能相机,属于现有技术,通过视觉相机对枸杞进行识别,采摘位置准确。枸杞采摘机械手压力传感器连接到单片机,压力传感器传输压力信号到单片机。压力传感器属于现有技术,通过压力传感器控制手指的夹持力度,防止枸杞果实夹破或掉落。枸杞采摘机械手套座呈U型,套座下端与缓冲弹簧固定连接。套座不仅起固定手指的作用,而且与缓冲弹簧连接,缓冲弹簧通过驱动连杆进行驱动。枸杞采摘机械手套筒两侧设有条形孔,套筒通过条形孔与第一驱动连杆滑动连接。第一驱动连杆上下滑动,带动弹簧压缩或伸展,进而带动套座上下移动,实现手指的张开与捏合。枸杞采摘机械手第二驱动连杆连接了步进电机,步进电机连接到单片机,并在单片机的控制下实现动力输出[4].
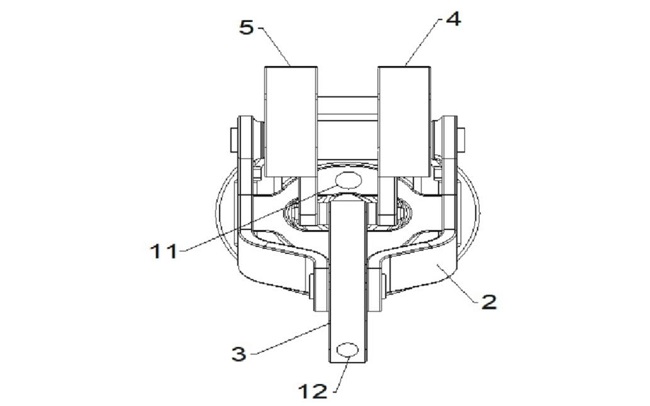
图2 枸杞采摘机械手俯视图
2.固定片;3.第一手指;4.第二手指;5.第三手指;11.视觉相机;12.压力传感器
3、结束语
该采摘机械手通过现有的单片机和工业相机技术实现智能控制,并且采用仿真设计,使其结构合理,采摘效率高,移动过程中果实不易掉落,有效解放了劳动力,降低了采摘成本。
参考文献
[1]曹林,张爱玲。我国枸杞产业发展的现状阶段与趋势分析[J].林业资源管理,2015(2):4-8+30.
[2]李伟。宁夏回族自治区优质枸杞产业发展影响因素及对策研究[D].北京:北京林业大学,2015.
[3]黄浩乾。采摘机械手的设计及其控制研究[D].南京:南京农业大学,2010.
[4]郭伟斌。除草机器人设计与控制[D].南京:南京林业大学,2008.





