����ժҪ
�������������ķ�չ����Ѹ�٣���֮���������ܼ�ʻ����ҲԽ��Խ�ḻ����Լ�ʻԱ����������ȫ���ܿ���һֱ���ܹ�ע�����غ����Ƶ�·ʹ���ߵİ�ȫ����Ҳ�����ӡ��ڷ�æ�Ľ�ͨ�����У������䱸��������ȫ�����ںܴ�̶����ܹ����⽻ͨ�¹ʵķ���������ʻԱ�ͽ�ͨ�����е����Ƶ�·ʹ���߾����ڱ������Ķ������о����������ڵ��͵ij��й����£�̽��ʵʱ������ײ����ָ���;��������ƶ�ʱ���ķ����������о�����Ҫ���ݰ����������������˶�״̬�����㷨������������ײ���������㷨�������ƶ������㷨���ƶ�ϵͳ��Ӧ���Եȣ��ص��о���ײ���������������˶�״̬���ơ�
����������������˵��˶�״̬������Ҫ�����˻����˶�ѧģ���Ƶ��� Kalman �˲��㷨�������˶�ѧģ���Dzο���ת�������˶�ģ�ͣ������˶�ѧģ���Dzο��ȱ����˶�ģ�ͣ�Ȼ��ͨ������任�����ڵ�ǰʱ�̳�������ϵ�Ƶ�ϵͳ״̬�����Ĺ�ϵӳ����������� Kalman �˲��㷨�е����ϵ������϶����˺��������˶�״̬���ƽ��������˻����˶�ѧ�ͼ���ѧ����ײ���������㷨��������ײ������������——��ײʱ�䣬���ڸ����������������ģ���������㷨�����ݵ�ǰ����ײʱ��������������ƶ����ٶȡ�Ϊ��ƥ�����ϵͳ���ƶ�ϵͳ�Ŀ��ƽӿڣ�����ʵ���ƶ�ʵ�����ݴ��һ���Դ��ͺ���ƶ�ϵͳ��Ӧģ�ͣ���ͨ����������ֶν����ƶ����ٶ����ƶ�����ѹ��֮��Ľ��ƹ�ϵ���Ӷ��������������ƶ�ִ�й�ͨ��
������� E-NCAP ��������˱�ײ����ز��Թ淶�����Ļ��� PreScan ������ģ���������صIJ��Գ���������� Matlab/Simulink ��������㷨ģ�飬��������—�㷨���Ϸ���ƽ̨�������������صķ�����ԡ�
��������һ����������ֵ��Ͳ��Թ�����CPFA��CPNA��CPNC��CPLA �� CPTA���������ƶ������㷨����ģ�������ߣ��ӷ�����Խ�����������������˶�״̬�����㷨Ч�����ã���ײ���������㷨Ҳ�ܼ�ʱ������ǰ�Ľ���״̬�������ƶ�����II�㷨�ܹ�������������ļ��ٶȣ��������ķ�����Թ����£�������Ƶı�ײ���˵������ƶ������㷨�ܹ���ȫ��ײ���ˡ�
�����ؼ��ʣ������ƶ����˶�Ԥ�⣬Kalman �˲�����ײ����������ģ����
����ABSTRACT
����The development of smart cars is increasing rapidly, and the accompanying smartdriving functions are becoming more and more abundant. The development of active andpassive safety functions for drivers has always attracted much attention, and safety issuesrelated to Vulnerable Road Users have gradually been paid attention to. In busy traffic,active safety functions equipped with cars can largely avoid traffic accidents, actually,Both drivers and vulnerable road users in the traffic environment need to be protected.
����The subject of this paper is to discuss the method of real-time assessment of collision riskindex and decision of active braking timing under typical urban conditions. The maincontents of this paper include: the estimation algorithm of the motion status of the hostvehicle and pedestrian, the evaluation algorithm of the collision risk of the host vehicle,the active braking decision algorithm, and the response characteristics of the brakingsystem.
����The Kalman filter algorithm based on the kinematics model is used to estimate themotion state of the host vehicle and pedestrians. The kinematic model of the host vehiclerefers to the Constant Turn Rate and Acceleration motion model, and the pedestriankinematic model refers to the Constant Velocity motion model. The transformation, basedon the current coordinate system of the vehicle, derives the relational mapping matrix ofthe system state vector, and then constructs the correlation coefficient matrix in theKalman filtering algorithm. Based on the results of estimating the pedestrian and hostvehicle's motion, a collision risk assessment algorithm based on kinematics and geometryis designed to calculate the collision risk characteristic parameter—Time ToCollision(TTC). Based on this characteristic parameter, a fuzzy logic decision algorithmis designed. Calculating the desired braking deceleration according to TTC at the presenttime. In order to match the control interface of the braking system in the simulation system,IVa first-order inertial pure hysteresis braking system response model was built based on theactual vehicle braking experimental data, and the braking deceleration and brake mastercylinder pressure were established by data fitting The approximate relationship betweenthem, thus linking decision expectations with brake execution.
����Drawing on the relevant test specifications for pedestrian collision avoidance in E-NCAP, this article builds relevant test scenarios based on PreScan scenario modelingsoftware, and develops related algorithm modules in conjunction with Matlab / Simulinkto build a scenario-algorithm joint simulation platform, and finally completes Simulationtest.
����In this paper, five typical test conditions (CPFA, CPNA, CPNC, CPLA, and CPTA)are designed. The active braking decision algorithm uses fuzzy logic decision. From theresults of the simulation test, the pedestrian vehicle movement state estimation algorithmworks well, the collision risk assessment algorithm can also feedback the currentemergency state in time, and the active braking decision algorithm can continuouslyrequest a reasonable deceleration in the complete simulation test conditions. Next, theactive braking decision algorithm for pedestrian collision avoidance designed in this papercan completely avoid collision.
����Key Word��Active braking, motion state predicting, Kalman filtering, collision risk assessment,fuzzy logic
����Ŀ ¼
����ժ Ҫ ················································································ I
����ABSTRACT ······································································· III
������ 1 �� ���� ········································································ 1
����1.1 �о����������� ···························································· 1
����1.2 ��ײ���˵�������ȫ�����о���״ ···································· 2
����1.2.1 �����о���״ ·························································· 2
����1.2.2 �����о���״ ·························································· 3
����1.3 ��ײ���������ƶ�ϵͳ������������о���״ ····················· 5
����1.4 �о������뷽�� ···························································· 5
������ 2 �� ��ײ���������㷨��� ················································· 9
����2.1 ���������㷨�ܹ� ························································· 9
����2.2 �����˶�ѧ�����˺������˶�״̬�����㷨 ······················ 10
����2.2.1 Kalman �˲��㷨��� ·············································· 10
����2.2.2 ���� Kalman �˲��������˶�״̬�����㷨��� ············ 12
����2.2.3 �����˶��켣���� ·················································· 21
����2.2.4 Σ����ײ������ ·················································· 23
����2.2.5 �����˶�ѧ����ײʱ����� ······································ 25
����2.2.6 �����˶�״̬������� ········································· 31
����2.3 ����С�� ··································································· 32
������ 3 �� ��ײ���������ƶ��ľ����㷨�о� ································ 33
����3.1 AEB-P �ֲ���Ƽܹ� ···················································· 33
����3.1.1 ��������ѧ��ģ ····················································· 34
����3.2 AEB-P ���߲��㷨��� ················································· 37
����3.2.1 �����ƶ�Լ���������� ············································ 38
����3.2.2 ���ڼ�ʻԱ�ƶ���Ϊ�ķּ������㷨 ·························· 43
����3.2.3 ���� TTC ģ�͵�ģ���������㷨 ··························· 44
����3.3 �ƶ�ϵͳ����Ӧ�����о� ·············································· 48
����3.4 ����С�� ··································································· 51
������ 4 �� �㷨ģ����֤ ··························································· 53
����4.1 ����ƽ̨��� ····························································· 54
����4.2 �㷨������֤ ····························································· 57
����4.2.1 �����˶�״̬Ԥ���㷨������֤ ································ 57
����4.2.2 ��ײ���������㷨������֤ ······································ 67
����4.2.3 �ƶ������㷨������֤ ············································ 70
����4.3 ����С�� ··································································· 71
������ 5 �� ���������������֤ ··············································· 73
����5.1 CPFA ����������֤ ······················································ 74
����5.2 CPNA ����������֤ ····················································· 76
����5.3 CPNC ����������֤ ····················································· 78
����5.4 CPLA ����������֤······················································ 80
����5.5 CPTA ����������֤ ······················································ 82
����5.6 ����С�� ··································································· 84
������ 6 �� �ܽ���չ�� ······························································ 85
����6.1 ȫ���ܽ� ··································································· 85
����6.2 ����չ�� ··································································· 86
�����ο����� ··········································································· 87
������л ················································································· 91
������ 1 �� ����
����1.1 �����������
��������������֯��WHO��2015 �귢���ġ���·��ȫȫ����״���桷ָ��ȫ��ÿ��������������ռ��·��ͨ�¹������������� 22�����ң���ͼ 1.1 ��ʾ����2013 ���·��ͨ����������ԼΪ 125 ���ˣ���ʵ�����ݱ����Ե�·��ȫ����Ĺ�ע���Ȼ���Ƿȱ�����е����ˡ������г��ߵ����Ƶ�·ʹ����ռȫ���·��ͨ������ 49%������ȫ��ע��������������� 16%���˿����� 4%��2010 �굽 2013 �����ݣ�����ͨ��������ӵĸ���[1]����ˣ������о���α������Ƶ�·ʹ���ߵİ�ȫ�����Ϊһ���о��ȵ㡣

����ͼ 1.1 WHO ������ͬ���͵�·ʹ���ߵĵ�·��ͨ�������
��������������ͨ�š���������˹����ܵȼ����ķ��ٷ�չ�����������ܻ��������������������綯��Ҳӭ���˾��г����Զ���ʻ������������������������ֵı仯����Զ�����Զ���ʻ�����䱸��������ȫ���ܣ��Զ������ƶ�ϵͳ��ǰ����ײԤ��ϵͳ�ȣ������ںܴ�̶����ֲ���ͨ��ʻԱ�Ĺ���ȱ�ݣ��Ӷ��������ʻԱ���ִ�ѧ˶ʿѧλ����2������������Ľ�ͨ�¹ʡ��������ҹ�·��ͨ��ȫ�����֣�NHTSA��2015 ��ĵ�����ʾ���� 94%�Ľ�ͨ�¹���������Ϊ���أ�������������Ӧ����ʱ�ȣ����𣬼���Ϊ����ռ��Ҫ���֡�
�������������������ʻԱ���ڹ��еļ�ʻȱ�ݣ������ܼ�ʻ�����µ���������ϵͳ���Ժܺ��ֲ���ʻԱ��ȱ�ݣ������Զ���ʻ�����䱸��һϵ��������ȫ�������Զ������ƶ����Զ�����ת��ǰ����ײԤ���ȣ�������һ���̶��ϰ�����ʻԱ�����Ŀ��Ƴ���״̬��ͨ�����ϵͳ��ǰʶ��Σ�պ�������Ԥ�����ʻ��ȫ�ԣ��Ӷ����ͽ�ͨ�¹ʷ����ĸ��ʡ�
����Erik Rosén ���˵��о����������������˵���ײ�ٶȴ� 50km/h ���͵� 25km/hʱ�����˵��������ս��� 85%[12]�����������˰�ȫ��������ȫ���ܵ�����Ŀ�Ļ����Խ�����ײ����Ϊ�������������ƶ�ϵͳֱ��Ӱ�쳵�����ٶȱ仯����Գ������ƶ�ϵͳ�����滮�����ٶȶ��ڽ�������������������Ҫ���塣
����1.2 ��ײ���˵�������ȫ�����о���״��
������ײ���˵�������ȫ������Ҫ�����������У����˼�⼼�����˶����ơ���ײ������������ײ���Ժ�ִ��ϵͳ���Ʋ��Եȣ������˻�����֪�;��߿���������Ҫ�о�����������о���Բ�ͬ�IJ��ص�ֱ����������о���
����1.2.1 �����о���״��
��������������˱�ײ������ȫϵͳ���о��Ƚ��磬2004 �� Yotam Abramson ���˻��ڳ�������ͷͨ����Ч�㷨ʵ�����˼�Ⲣ���������˲��㷨��Ԥ�����˹켣�����ڴ˽�����ײ���ʼ���[3]��2004 �� Fkbdbric Large ���˻���ѧϰ���������˵�������Ϊ����������˶�Ԥ��[5]��2004 �� Toshihiro Osaragi ���ھ���ѹ���ĸ����������������Ϊ��ģ�Ͳ�������ʵ���������ݶ�ģ�Ͳ�����������[6]��2010 ��Samuel Gidel ���˻��ڳ��صļ����״ﴫ��������˶�������Ŀ����ļ�⡢��λ��ʶ����٣���Ҫ�ǹ�������ʶ���㷨������о�[4]��2010 �� Erik Coelingh ���������һ�ֻ������˼��-ȫ���ƶ�����ײԤ��ϵͳ CWAB-PD��Collision Warningwith Full Auto Brake and Pedestrian Detection�����ڱ�Ҫ��ʱ��ִ�������ƶ�����
���������ٲ����� 35km/h��������ȫ������ײ����[11]��2011 �궫��ũҵ��ѧ SoichiroAoyagi �����ص��о����ڳ��н�ͨ��������խ��·������ͻȻ�ᴩ��·���̵��˶�ѧģ�ͣ����������������������ʵ�Σ����ײԤ�����[9]��
����2017 �� ?lvaro Esquer ������ų�����������ת���ײ�IJ�����һ���̶��ϱ������ƶ���Ч�ʸ��ߣ������������ƶ��� LPTB��Last Point to Brake������ת���LPTS��Last Point to Steer�������� Car-to-Car������ײ������ Car-to-VRU������ײ���Ƶ�·ʹ���ߣ�����̽����ͨ������ת���ײ�Ŀ�����[7]��J?rg Hillenbrand ���������Э��ϵͳDZ������ͼ�ʻԱ�ɽ����Լ�����������صķ��յĶ༶��ײ��������㷨[8]��2017 �� Min-Ki Park ��������˻��� funnel map �ܹ���Ŀ������ɸѡ�㷨Ӧ�������ڵ��Զ������ƶ����ƣ�ͨ������Ŀ��������������ײ������Ϊɸѡ���ݣ�������ʵ���ɼ�������У��Ŀ������ɸѡ�㷨�ľ���[10]��
�������о���������һ�����Ǽ����ڻ��ڴ��������������ͷ���״������Ŀ�����ʶ���Լ�Ŀ������˶�״̬����������һ��������Χ����ײ��⡢Σ�������Լ����������ײ�ľ����㷨���������������Ŀ������˶�״̬������Ҫ��ͨ�������Ӿ��ĽǶ������������ڳ���Ӳ����Ҫ����ߣ�����ʵ�ʳ���װ�䣻��������ƶ�������Ҫ������ȫ�������ײʱ�����ֲ�����ͨ��������ʵ��궨��ز�����ֵ�����ַ����Ĺ���ȱ�ݾ���ʹϵͳ��³���Բ���ǿ����ʵ�ּ�Ӧ�÷�ʽƫ������������ײ�����������о�����������Ե�ǰ����ʷ������������ײ���գ���û�ж�̬�Ĺ�����δ��һ��ʱ���ڵ���ײ���գ���˴���һ�������ԡ�
����1.2.2 �����о���״
�������ڶ����˱���������о���ȽϹ���ƫ��һЩ������Ҳ������������˲����о���2015 ���������ҵ��ѧ�����ȵ����о����Զ��ƶ�ϵͳ�IJ���������������̽�ⷶΧ������ƶ����ٶȡ��ƶ���ǰʱ����ƶ�Э��ʱ��ȣ����¹������˷���MAIS3+���˷��պ��������յ�Ӱ�죬������й������˵�·��ͨ�¹����������ʺϹ�������Ų���ֵ[13]��2015 ��ͬ�ô�ѧ���ص���������ڼ�ʻԱ�����ƶ���Ϊ��Σ�չ���ģ�͵�����Ԥ�������ƶ��ı�ײ���ԣ�����Σ�չ���ģ�������Σ�յȼ�ӳ�䵽��ͬ�ȼ����ƶ�������� PreScan ���������������з�����֤[14]�����ִ�ѧ˶ʿѧλ����42017 ���־Զ���˵��˻��� PreScan �������Զ������ƶ���Autonomous EmergencyBraking��AEB�������ײ�㷨������֤���Ա��˼��־���İ�ȫ����ģ�ͣ�Mazda��Honda��Berkeley �� Seungwuk Moon������ײʱ�䣨Time To Collision��TTC��ģ�ͣ��ڲ����ż�ʻԱ��������ǰ���£�TTC ģ�ͱ�������[15]���ƺ�����¹��ؽ�������AEB ϵͳ�������߷��棬������������������о�����ȷ�� AEB ϵͳ����Ч�����۷���[16]��2015 ��ͬ�ô�ѧ���غ������������һ���ں��ƶ����ƺ�ת����Ƶ��Զ��������ƣ�Autonomous Emergency Control��AEC�����ԣ����ڼ�ʻԱģ�ͺͻ���ģ���Ƽ�ʻԱ�IJ��������¹ʵĿ��ܣ��ɴ�ͨ��ģ��Ԥ����ƣ�ModelPredictive Control��MPC�������������㷨�������������˶�[17]�������ѧ��Ϊ����������ϲ�ģ�����ƺ��²� PID ���Ƶķֲ�������˱�ײ���ԣ�����ײ��������ģ���ǻ��� TTC ģ��[18]�����ϴ�ѧ��ӱ���ǵ������˶�������ԣ�����һ�������Ʒ����������������˶������ֻ���dz�-��������ײ�ij�ͻ����ģ�ͣ��������λ�任�㷨��ʵʱ���������˺�����[19]�����ٵ��˻���ȫ���ƶ�������ƽ̨��ȫ������ϵ��ͨ���������˲��㷨���ƶ����˵Ĺ켣����Ԥ�⣬��������ײ��⣬Ϊ��������˵���ײ�������ƻ������н��ķ���[20]��
�������ռ������о����������������о����ص�Ҳ�����������˶�״̬���ơ���ײ�����������������ƾ��������ࡣ�������˵��˶������л���������Եĸ��ʹ��Ʒ�����Ҳ�л����˶�ѧ�����Թ����㷨����ײ���������㷨����Ǽ̳г�-����ײ�ķ�����������������ײʱ��ģ�ͺͰ�ȫ����ģ�ͣ��������ƾ������������ƶ�Ϊ��������ת����Ȼ�������о������ԣ�������ʵ���ϵ����û��Ƿdz��ټ���������������˱�ײ�㷨����Ӧ�����������������ϵı�ײ���������ر���Գ�����ʻ������ϵı�ײ���˳����������ݺ����ϵı�ײ�����˺ᴩ��������������Dz���������⣬ͨ����ײ���˵����������㷨��������ȫ��ײΪ��չ������һ���̶��Ϻ����˼�ʻԱ��ʵ�ʼ�ʻ���ܣ�����ʵ��ij�̶ֳ��������˼�ʻԱ�����İ�ȫ���⣬��ƥ���ʻԱ����������ͼ��������Ԥָ��Ҳ��ȫ����������ʻԱ�Գ���������ص�Σ�ղٿء�

ͼ 1.2 �½ڹ���ʾ��ͼ

ͼ 2.9 �����켣���ȼ���ʾ��ͼ�������˶���
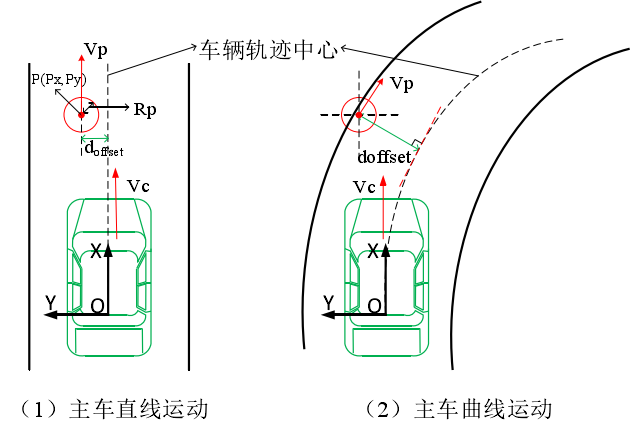
ͼ 2.10 ��������ϵ�����˵�ƫ�ľ���

ͼ 2.14 ���� 2 �µ� TTC ����

ͼ 2.16 ��ʼ���㷨����ʾ��ͼ
��…………���ڱ���ƪ���ϳ�,��������ʡ��,��ϸȫ�ļ���ĩ����
������ 6 �� �ܽ���չ��
����6.1 ȫ���ܽ�
�������ſ�ѧ�����ķ�չ�����ܳ���Ӧ�ó�������㷺�����˼�ʻ����������о�Ҳ�ܵ������������Ȼ���������ﵽ��ȫ�����˼�ʻˮƽ����������������Ŀ����������ܸ�����ʻϵͳ���з���Ӧ��������С��һ��ࡣ���������ص�һ���������ǹغ�������ȫ��������ȫ���ܣ����ܳ����з�Ӧ�����ܿ���ȫ��ʻ���⣬ֻ���䱸���㹻�����͵���������ȫ���ܵ����ܳ��Żᱻ���������ܣ���ˣ������о��ı�ײ���������ƶ����������ܳ��о�������ȵ㡣
���������о����ص����ڶ��˳���������ײ���������������ƶ����ߣ����ڴ���������Ļ�����֪�ͻ��ڵײ�ִ������̬��Ӧ���Բ��������о�������֪���˵�ǰ��λ����Ϣ���ڵ�ǰ��������ϵ�£��������ϵ�������˶�ѧģ��ͨ���Ľ���Kalman Ԥ���㷨���������˺��������˶�״̬���켣���Դ�Ϊ���������˶�ѧ��ײ�����������������������������ײ���յȼ���Ȼ��ͨ��ģ���������㷨��������ƶ����ٶȣ����ͨ������ƶ�ϵͳ��Ӧģ�����ִ����ʵ�ʵĿ������ƶ�����ѹ����������������˶�״̬���Ʒֱ�������˶�ѧģ��������Աȣ����ջ����ȱ����˶�ģ�ͣ�CA ģ�ͣ��Ĺ���Ч�����š������ƶ������㷨�Ƚ��˴�ͳ�ּ��ƶ��ͻ���ģ�����������ƶ��㷨�����ƶ����ٶ�������̶��ԣ�ģ�������ߵ��������ٶȸ����ϼ�ʻԱ���ƶ����ܡ�
�������Ļ����㷨���۵��Ƶ����� PreScan �� Matlab/Simulink ���Ϸ��滷���´�˼��IJ��Գ���������֤�����ݷ�������ָ���㷨���Ż�����ͬʱҲ�ο���E-NCAP ������˱�ײ�IJ��Թ淶������Ʋ��Գ�������ȫ�����Ĺ�����֤������Ҳ�������������������ײ���������㷨�����Ի�����˶��˺ᴩ���е��IJ��Գ�������صķ���������� 5 �¡�
�����������˱�ײ��ʵ������Ҫ��dz��ߣ�ʵ���ҵ��������ޣ������ܽ�����ص�ʵ��ʵ�飬����ڷ��滷�������˴����ķ���ʵ�飬���� PreScan ǿ��ij�����ģ���ܿ��Ի���ʵ��ʵ�������е����Ʋ��Գ�����
�������ĵĴ��µ����£�
������1�����ڵ�ǰ��������ϵ���������ϵ�£�������˶�ѧ�� Kalman �˲��㷨����ȫ������ϵ�µ��˶�״̬���Ʒ�����ȣ����������ϵ�¿�����Ч��С�ۼ�����߹��ƾ��ȡ�
������2����Զ�Ŀ�����˹����������ɸѡ��Σ��Ŀ�������㷨��������Ŀ�곡���µ���ײ���ա�
������3������Ļ���ģ�������ƶ������㷨�����˴�ͳ�ķּ��ƶ������㷨�ƶ�������̵Ķٴ�кͲ������ԡ�
����6.2 ����չ��
�������������о�ƽ̨�����������µط������ڲ��㣬���Ժ��ѧϰ�����н����������о���
����1�������˶������㷨�������������ڳ�������ϵ�µ� XY ֵ��û���õ����������������ٶ���Ϣ�����㷨ԭ���Ͽ�������IJ�����Ϣά��Խ�࣬����ƾ���Ҳ��Խ�ߣ����ڿ��Խ�����ٶ�������˶������㷨�С�
����2�������˶�״̬�����Dzο� CTRV ģ�ͣ���ʵ�ʵij����˶��У������ļ��ٶ��Dz��ܺ��Եģ��ر����ڽ��������ƶ�ʱ����ˣ����ڿ��Բ��û��� CTRA ģ����������ṩʵ�ʵļ��ٶ������� CTRA ģ�͡�
����3����Ŀ�����˵ķ����Լ�ǿʱ�������ڴ��й����м�ͣ����Kalman �㷨�Ĺ��ƾ��Ȼ�Ƚϵͣ���Σ��ʱ�̻�ֱ��Ӱ�������ƶ����ܣ����������ȫ�����Ե�Ŀ��������������Կ�չ���������Ʒ���̵ķ������˶�״̬�����㷨�о���
����4��������˱�ײ���ԣ�E-NCAP �Դ������������ȶ�����Ӧ�IJ���������ϵ����������ʵ���������ƾ���ʵ�֣���ˣ��������������Խ�����صĴ������ڻ���ִ�����ڻ����飬��ʵ�ʵĴ�������ִ��������֤�㷨��Ч����
���������
[1] https://www.who.int/violence_injury_prevention/road_traffic/zh/.
����[2] SINGH S. Critical Reasons for Crashes Investigated in the National Motor VehicleCrash Causation Survey[R].Washington DC: National Highway Traffic SafetyAdministration,2015.
����[3] S. Gidel, P. Checchin, C. Blanc, T. Chateau and L. Trassoudaine, "PedestrianDetection and Tracking in an Urban Environment Using a Multilayer LaserScanner," in IEEE Transactions on Intelligent Transportation Systems. 2010.
����[4] Y. Abramson and B. Steux, "Hardware-friendly pedestrian detection and impactprediction," IEEE Intelligent Vehicles Symposium, 2004.
����[5] F. Large, D. Vasquez, T. Fraichard and C. Laugier, "Avoiding cars and pedestriansusing velocity obstacles and motion prediction," IEEE Intelligent VehiclesSymposium, 2004.
����[6] T. Osaragi, "Modeling of pedestrian behavior and its applications to spatialevaluation," Proceedings of the Third International Joint Conference onAutonomous Agents and Multiagent Systems, 2004. AAMAS 2004., New York, NY,USA, 2004.
����[7] E.?lvaro, A.Andrés,B.Sébastien,S.Laura. " Study of the application of steeringsupport systems to complement autonomous emergency braking systems for activecollision avoidance strategies," Proceedings of the 25th International TechnicalConference on the Enhanced Safety of Vehicles (ESV).
����[8] J. Hillenbrand, A. M. Spieker and K. Kroschel, "A Multilevel Collision MitigationApproach — Its Situation Assessment, Decision Making, and PerformanceTradeoffs," in IEEE Transactions on Intelligent Transportation Systems, 2006.
����[9] Aoyagi, S., Hayashi, R., and Nagai, M., "Modeling of Pedestrian Behavior inCrossing Urban Road for Risk Prediction Driving Assistance System," SAETechnical Paper 2011.
����[10] M. Park, S. Lee, C. Kwon and S. Kim, "Design of Pedestrian Target Selection WithFunnel Map for Pedestrian AEB System," in IEEE Transactions on VehicularTechnology,2017.
����[11] E. Coelingh, A. Eidehall and M. Bengtsson, "Collision Warning with Full AutoBrake and Pedestrian Detection - a practical example of Automatic Emergency ���ִ�ѧ˶ʿѧλ����88Braking," 13th International IEEE Conference on Intelligent TransportationSystems, Funchal, 2010.
����[12] Erik Rosén, Ulrich Sander, Pedestrian fatality risk as a function of car impact speed,Accident Analysis&Prevention,2009.
����[13] ����,����,�Թ�,������,����.�Զ��ƶ�ϵͳ���˱���Ч�����о�[J].��������,2015.
����[14] ����,������,��С��,��־��.���������ƶ�ϵͳ��ײ���Ե��о�[J].��������,2015.
����[15] ��Զ־,���½�,����.���� Pre Scan �� AEB ϵͳ�����ײ�㷨��������֤[J].������ȫ�����ѧ��,2017.
����[16] �ƺ�. �����¹��ؽ����Զ������ƶ�ϵͳ�����˱���Ч���о�[D].�Ϻ����̼�����ѧ,2016.
����[17] ����,������.���������Զ��������Ʋ���[J].ͬ�ô�ѧѧ��(��Ȼ��ѧ��),2015.
����[18] ��Ϊ,�Ժ���,���.�Զ������ƶ�ϵͳ���˱�ײ���Լ�������֤[J].�����ѧѧ��,2019.
����[19] ��ӱ. ���ڸ��ʷ������˳���ͻ�������˺���Ԥ��[D].���ϴ�ѧ,2018.
����[20] ����,������,����,������.�������˹켣Ԥ���ȫ���ƶ�������·���滮[J].���������,2018.
����[21] Euro NCAP VULNERABLE ROAD USER (VRU) PROTECTION��V3.0.2��2019��.
����[22] �� �� �� �� �� �� �� �� �� C-NCAP �� 2018 �� �� �� �� �� �� .http://www.c-ncap.org/cms/files/cncap-regulation-2018.pdf.
����[23] P. J. Hargrave, "A tutorial introduction to Kalman filtering," IEE Colloquium onKalman Filters: Introduction, Applications and Future Developments, London, UK,1989.
����[24] R. Schubert, C. Adam, M. Obst, N. Mattern, V. Leonhardt and G. Wanielik,"Empirical evaluation of vehicular models for ego motion estimation," 2011 IEEEIntelligent Vehicles Symposium (IV), Baden-Baden, 2011.
����[25] Alfred Eckert, Andree Hohm, Stefan Lueke. An Integrated ADAS Solution ForPedestrian Collision Avoidance. Cassis & Safety Division, Continental,2013.
����[26] ��־��. ��������[M]. ��е��ҵ������, 2009.
����[27] ����,������,�º���.��ʻԱ�ƶ���ת���ײ����[J].ͬ�ô�ѧѧ��(��Ȼ��ѧ��),2016.
����[28] W.Hugemann,M.Nickel. Longitudinal and Lateral Accelerations in Normal DayDriving.2003.
����[29] ��Զ־,���½�,����.���� Pre Scan �� AEB ϵͳ�����ײ�㷨��������֤[J].������ȫ�����ѧ��,2017.
����[30] Kondoh T,Yamamura T,Kitazaki S,et al. Identification of Visual Cues andQuantification of Drivers’ Perception of Proximity Risk to the Lead Vehicle in Car-Following Situations[J]. Journal of Mechanical Systems for Transportation andLogistics, 2008.
����[31] John D.Lee,Daniel V.McGehee etal. Collision Warning Timing,DriverDistraction,and Driver Response to Imminent Rear-end Collisions in a High-fidelityDriving Simulator[J].Human Factors,2002.
����[32] Zhang Y , Antonsson E K , Grote K . A new threat assessment measure for collisionavoidance systems[C]// Intelligent Transportation Systems Conference, 2006. ITSC'06. IEEE. IEEE, 2006.
����[33] ������. ģ�����ۼ���Ӧ��[M]. �����Ƽ���ѧ������, 1998.
����[34] Yager R R,Zadeh L A ,Pub K A. Introduction to fuzzy logic applications inintelligent systems[M]. Kluwer Academic, 1992.
����[35] Llorca D F , Milanes V , Alonso I P , et al. Autonomous Pedestrian CollisionAvoidance Using a Fuzzy Steering Controller[J]. IEEE Transactions on IntelligentTransportation Systems, 2011.
����[36] Winkler S, Werneke J, Vollrath M. Timing of early warning stages in a multi stagecollision warning system: drivers' evaluation depending on situational influences[J].
����2016.
����[37] Shimizu T , Raksincharoensak P . Motion planning via optimization of riskquantified by collision velocity accompanied with AEB activation[C]// 2017 IEEEInternational Conference on Vehicular Electronics and Safety (ICVES). IEEE, 2017.
����[38] Yager R R , Zadeh L A , Pub K A . Introduction to fuzzy logic applications inintelligent systems[M]. Kluwer Academic, 1992.
����[39] ����. ����������ײ��������ײԤ��ϵͳ�ؼ������о�[D].�廪��ѧ,2016.
����[40] Lee J D , Mcgehee D V , Brown T L , et al. Collision Warning Timing, DriverDistraction, and Driver Response to Imminent Rear-End Collisions in a High-Fidelity Driving Simulator[J]. Human Factors: The Journal of the Human Factorsand Ergonomics Society, 2002.
����[41] Ҷһ��. ���������ݺ���������ײ���Ʋ����о�[D].���ִ�ѧ,2019.
����[42] �Ž���,������,���Ѵ�.���ڸ���ͳ�Ƶij����˶��켣Ԥ�ⷽ��[J].���½�ͨѧԺѧ��,2017. [43] ����t. ���˻�����ȷ���µ��˳���ײ����Ԥ��[D].���ϴ�ѧ,2017.
����[44] ����,������,�º���.��ʻԱ�ƶ���ת���ײ����[J].ͬ�ô�ѧѧ��(��Ȼ��ѧ��),2016.
����[45] ��Ф��. ��������ӦѲ������ϵͳģ�����Ʋ����о�[D].����������ѧ,2015.
����[46] ����. ���ܳ���ǰ������Ŀ����˶�״̬ʶ���о�[D].���ִ�ѧ,2014.
����[47] ������.���� AEB ϵͳ���Է����������о���״����[J].����Ƥ��,2018.
����[48] ��ǿ,������,����.ͨ����ʵ��ͨ�¹�������֤ AEB ����ϵͳ����Ч��[J].
������������֤,2018.
����[49] ������. ���˼�ʻ������̬�ϰ����ײ�ؼ������о�[D].�й���ѧ������ѧ,2017.
����[50] ���,���Ƕ�,�콨ѫ. �Զ�����ɲ��ϵͳ(AEB)���Գ����о�[C]. .����������Ϣ��2016 ��� 6 �ڣ��ܵ� 363 �ڣ�.:������������ѧ��,2016:2-9.
����[51] ������. �����ƶ�/ת�������������ײ����ϵͳ�о�[D].�Ͼ����պ����ѧ,2016.
����[52] �䶬÷. �ֲ�ʽ�����綯��������ѧ���ƻ����Ϳ��Ʋ����о�[D].���ִ�ѧ,2015.





