摘 要
铸造在工业生产中占有举足轻重的地位,铸件已被普遍应用于航空、航天、汽车、电子等领域,机器人技术在铸造行业的应用是实现绿色铸造、智能铸造的关键举措,但现采用的串联机器人普遍存在负载小、误差较大以及柔性度不足等缺陷,工作范围受到严重限制,难以满足中大型铸件和异型铸件的作业要求。本文提出以混联机构为主体结构的移动式铸造机器人,可同时满足工作范围灵活,负载大和定位精度高等要求。
确定了移动式铸造机器人的总体结构和作业原理,运用螺旋理论求解并联工作臂的运动自由度,确定2RPU-2RRPR并联工作臂可实现一平移两转动三自由度运动,根据驱动副选取原则确定四个移动副作为主动副。
基于矢量方程法建立2RPU-2RRPR并联工作臂输入和输出之间的位置方程,运用MATLAB得到不同运动状态下各个杆长随时间的位移变化曲线,并结合ADAMS虚拟仿真证明了数值计算与仿真结果的正确性。
在运动学位置反解的基础上,通过求导法得到并联工作臂驱动副与动平台的速度和加速度之间的映射关系,根据雅克比矩阵的降秩类型,分别计算三类奇异位形发生的几何条件,为铸造机器人运动中奇异的规避提供理论基础,同时,基于蒙特卡洛法得到了并联工作臂在执行浇注作业时工作空间的三维图和截面图。
基于虚功原理法分析了平衡状态下驱动力和负载之间的映射关系,建立了重力作用下的力学模型,运用拆杆法得到上下铰链受到的约束力;求出惯性力作用下并联工作臂动力学方程,通过结构优化设计和理论计算搭建铸造机器人实验样机。
基于TRIZ理论设计一种铸造机器人全向多指异步抓手,完成异型铸件和中大型铸件的搬运和抓取任务,运用ANSYS Workbench对抓手进行静力学和模态分析,完成部分结构与尺寸优化,为抓手样机设计和制造提供依据。最后,通过铸造机器人实验样机完成相关实验,验证了理论计算和模拟仿真的正确性。
关键词: 铸造机器人;并联工作臂;运动学;静力学;动力学;性能分析;抓手。
Abstract
Foundry plays an important role in industrial production, castings have been widely used in aviation, aerospace, automobile, electronics and other fields, the application of robotic technology in foundry industry is the key measure to realize green casting and intelligent casting. However, the series robots generally have some shortcomings, such as small load, large error and insufficient flexibility, their working range is severely limited, which makes it difficult to meet the requirements of large and medium castings and special castings. This paper presents a mobile casting robot with hybrid mechanism as the main structure, which can meet the requirements of flexible working range, large load and high positioning accuracy at the same time.
The overall structure and working principle of the mobile casting robot are determined, and the degree of freedom of motion of the parallel manipulator is solved by the screw theory. It is determined that the 2RPU-2RRPR parallel manipulator can realize a translational, two rotational and three-degree-of-freedom motion. Four moving pairs are determined as active pairs according to the selection principle of driving pairs.
Based on vector equation method, the position equation between input and output of 2RPU-2RRPR parallel manipulator is established. The displacement curves of eachbar length with time under different motion states are obtained by using MATLAB. The correctness of numerical calculation and simulation results is verified by combining ADAMS virtual simulation.
Based on the inverse solution of kinematic degree, the mapping relationship between the speed and acceleration of the driving pair of parallel manipulator and the moving platform is obtained by derivation method. According to the reduced rank type of Jacobian matrix, the geometric conditions of three kinds of singularities are calculated, which provides a theoretical basis for the avoidance of singularities in the motion of foundry robots. At the same time, based on Monte Carlo method, the parallel manipulator is implemented. Three dimensional and cross sectional drawings of workspace during pouring operation.
Based on the virtual work principle, the mapping relationship between driving force and load under balanced state is analyzed, and the mechanical model undergravity is established. The constraint force on upper and lower hinges is obtained by the method of dismantling the bar. The dynamic equation of parallel manipulator under inertia force is obtained, and the experimental prototype of foundry robot is built by structural optimization design and theoretical calculation.
Based on TRIZ theory, an omnidirectional multi-fingered asynchronous gripper of casting robot was designed to carry and grasp special-shaped castings and medium and large castings. Static and modal analysis of the gripper was carried out by ANSYS Workbench, and part of the structure and size were optimized, which provided a basis for the design and manufacture of the gripper prototype. Finally, the validity of theoretical calculation and simulation is verified by the experiment prototype of casting robot.
Key Words: casting robot, parallel working arm, kinematics, statics, dynamics, performance analysis, gripper。
引 言
铸造生产是获得机械零件的重要方法之一,铸件已成为整机组成不可或缺的一部分,随着智能化装备的不断升级,机器人替代人工作业能够有效的提高铸件的质量和精度,目前使用的铸造机器人多为六自由度串联机器人,运动灵活,但负载小、柔性度差以及累积误差较高,难以满足中大型铸件和异型铸件的作业要求,必须为铸造机器人寻求新型结构和工作原理,由于并联机构闭环结构的优点,能够有效的弥补串联机器人的缺陷,且并联机构在理论不断完善的基础上得到快速发展,但是满足作业要求的并联机构在铸造领域内应用较少,在执行实际任务时运动性能有待进一步研究。
本文设计了以2RPU-2RRPR并联机构为执行机构的移动式铸造机器人,并联工作臂在实现两转动一平移运动的基础上与回转装置、升降装置共同组成五自由度混联式铸造机器人,并联工作臂各支链均采用伺服电机独立驱动,实现动平台不同运动形式和位姿的调节,在完成作业任务的同时提高了负载能力、定位精度和柔性度。
为了检验移动式铸造机器人结构设计与尺寸设计的合理性,需要进行以下方面的工作:(1)运用螺旋理论计算不同位形下动平台的自由度数和性质,结合位置矢量法和求导法推导出并联工作臂的运动学方程,并运用MATLAB和ADAMS软件对位置方程进行联合仿真;(2)基于雅克比矩阵分析并联工作臂出现奇异位形的几何条件,并通过蒙特卡洛法得到工作空间的三维图和截面图;(3)基于虚功原理法和拉格朗日法建立并联工作臂的力学方程;(4)基于TRIZ理论完成全向多指异步抓手的结构设计,并运用ANSYS Workbench对其进行静力学和模态分析,对变形较大的部件进行优化设计。通过理论计算和模拟仿真完成了铸造机器人的设计,并试制了实验样机。
1、绪论。
1.1、选题背景及意义。
铸造是通过高温使金属熔化获取金属液体,再把液体金属通过浇注、压射等方式将其注入与铸件质量、体积和外轮廓等相适应铸件型腔内,等待其降温、冷却、凝固过后而获取零件的工艺方法。
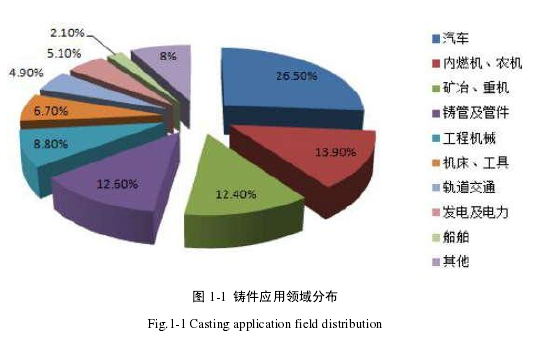
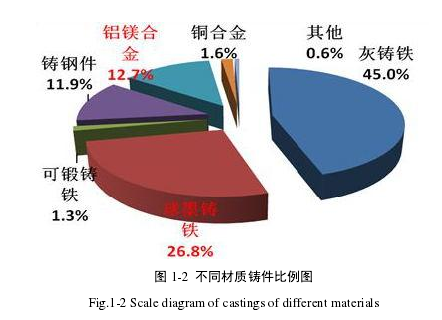
铸造工艺是制造业中最重要的生产技术之一,与机加工、锻造等加工工艺相比,铸造可以远远降低生产的成本,且能够实现其他加工无法完成的工艺过程,无论是结构复杂或是形状轮廓不规整的零件都能通过铸造的方式获得,且通常不会被零件的体积大小影响,适应性强,目前,铸件已经在机械、航空、汽车、船舶、铁路和兵器等各个领域广泛应用[1],其发展的水平不仅影响到整个装备生产的效率,而且直接关乎于零件产品的质量,是国家经济甚至是全球经济的重要组成部分。近年来,铸造业大力发展,我国的铸件产量早已经名列世界首位,超过了全球总量的40%左右,但是出口量仅仅约为10%左右,反映出我国铸造整体技术水平和先进国家还有一定的差距[2-3],主要的原因包括铸件的质量较差、铸造工艺和装备落后等[4],图1-1表示的是铸件在不同领域内所占有的比例,图1-2表示的是不同材料的铸件比率,图1-3表示的是2002年至2017年铸件变化规律。
目前,铸造行业主要多数采用以人工为主的方式完成作业任务,劳动程度密集、资源耗费大,且工作效率低、产品质量差和精度不足,严重影响到零件成品率[5],同时铸造生产环境恶劣,存在高温、高粉尘等威胁人身安全的危险环境,工业机器人在铸造领域中的推广与应用不仅可以解放繁重的劳动力,还提高了生产效率和改善产品质量[6-7]。图1-4表示人工浇注作业现场,图1-5表示铸造机器人的作业场景。
【由于本篇文章为硕士论文,如需全文请点击底部下载全文链接】
1.2 铸造机器人研究动态
1.2.1 铸造领域机器人技术的应用
1.2.2 复杂环境下铸造机器人运动研究
1.2.3 结论 及存在问题
1.3 并联机构应用与研究
1.3.1 并 联机构应用
1.3.2 少自由度并联机构研究
1.3.3 冗余驱动并联机构研究
1.3.4 运动学性 能研究
1.3.5 力学性能研究
1.4 课题主要研究内容
1.5 本章小结
2 可移动铸造机器人总体结构设计
2.1 移动平台设计.
2.2 铸造机器人主体机构拓扑结构设计
2.3 可移动铸造机器人整体方案设计
2.3.1 移动式机器 人结构简介
2.3.2 工作原理
2.4 并联工作臂描述与坐标系建立
2.5 并联工作臂自由度计算
2.5.1 初始位形.
2.5.2 一般位形.
2.6 本章小结
3 2RPU-2RRPR 并联工作臂运动学分析
3.1 引言
3.2 并联 工作臂位置分析
3.2.1 位置反解分析
3.2.2 位置反解仿真 与分析.
3.2.3 位置正 解分析.
3.3 机构运动位置仿 真.
3.3.1 ADAMS 虚拟样机建立
3.3.2 三 自由度并联工作臂仿真与分析
3.4 本章小结.
4 2RPU-2RRPR 并联工作臂奇异性 与工作空间分
4.1 引言
4.2 2RPU-2RRPR 机构速度分析与仿真.
4.2.1 并联工作臂速度分析
4.2.2 并联工作臂速度仿真与结果分析
4.2.3 并联工作臂加速度分析.
4.3 2RPU-2RRPR 机构奇异性分析.
4.3.1 反解奇异.
4.3.2 正解奇异.
4.3.3 混合奇异.
4.3.4 可操作度评价.
4.4 2RPU-2RRPR 机构的工作空间分析
4.4.1 几何约束条件
4.4.2 蒙特卡洛法.
4.5 本章 小结.
5 2RPU-2RRPR并联工作臂静力学与动力学分.析
5.1 引言
5.2 并联工作臂静力学分析
5.2.1 并联工作臂简化静力学分析
5.2.2 重力作用下并联工作臂静力学分析
5.2.3 并联工作臂约束力分析
5.3 并联工作臂动力学分析
5.3.1 并联工作臂系统动能计算
5.3.2 并联工作臂系统势能计算
5.3.3 并联工作臂动力学方程建立
5.4 本章小结
6 基于TRIZ理论的铸造机器人抓手设计与实验验证
6.1 机器人抓手系统分析
6.1.1 问题描述
6.1.2 因果轴分析
6.2 机器人抓手工程问题解决与方案整理
6.2.1 物场分析
6.2.2 技术冲突表达
6.2.3 方案整理
6.3 抓手静力学分析与优化
6.3.1 材料选择和网格划分
6.3.2 边界条件和载荷分布
6.3.3 计算求解
6.3.4 优化设计
6.4 抓手模态分析
6.4.1 模态分析基础理论
6.4.2 模态分析过程与结果分析
6.5 实验样机的组成与操作流程
6.5.1 实验样机的组成
6.5.2 操作流程
6.6 实验结果 与分析.
6.7 本章小结.
7 结论
论文针对固定工位串联式铸造机器人因存在负载小、定位精度低和柔性度不足等问题,难以实现中大型铸件和异型铸件的浇注、抓取、搬运和取芯等任务,设计了一种以2RPU-2RRPR并联工作臂为执行机构的新型移动式铸造机器人,介绍了结构组成和工作原理,对执行机构分别进行了运动学、奇异性、工作空间、静力学和动力学等性能分析,并运用MATLAB和ADAMS软件进行数值模拟和虚拟仿真,通过ANSYS Workbench对新型全向多指异步抓手进行了静力学分析和模态分析。最后,在理论计算和分析的基础上,研制出铸造机器人实验样机。主要结论如下:
1)完成了一种新型结构的移动式铸造机器人的总体结构设计。完成了2RPU-2RRPR并联工作臂在不同位形下自由度的计算,可以实现两转动一平移三自由度运动,与回转装置、升降装置共同组成两平移三转动的五自由度混联机构,可满足铸造作业中需要的运动自由度。
2)通过齐次变换和连杆位置矢量方程推导了并联工作臂位置正反解,并运用MATLAB得出动平台在不同运动规律下各支链杆长的位移变化曲线,同时运用ADAMS仿真技术证明了理论计算的准确性。
3)基于位置反解和求导法,推导出并联工作臂的雅克比矩阵和Hessian矩阵,得到并联工作臂驱动副和动平台之间的速度与加速度映射关系,通过Jacobian代数法,得到发生奇异的几何条件,受到结构和参数的限制,成功规避了奇异位形。运用Monte Carlo法得到并联工作臂在作业时的工作空间,证明了铸造机器人能满足较大范围内的作业要求。
4)基于虚功原理法推导出在平衡状态下驱动力和外力之间的力雅克比矩阵,采用拆杆法得到上下铰链处的约束力。采用拉格朗日法和达朗贝尔原理,得到动平台的运动状态和力之间的关系,再通过力雅克比矩阵得到并联工作臂的动力学模型。最后,根据理论计算和数值模拟仿真分析的结果,完成了实验样机的研制。
5)基于TRIZ理论创新设计了铸造机器人全向多指异步抓手的总体结构,并运用ANSYS Workbench对抓手进行静力学分析和模态分析,对部分结构和尺寸进行优化,使其更加满足作业时的力学性能要求。
参考文献