摘 要: 设计了一种使用IAP15W4K58S4单片机作为主控芯片的用于腰颈椎牵引的多功能牵引理疗系统.阐述了该牵引理疗床的系统结构、主要功能和工作原理.分析了基于IAP15W4K58S4单片机实现运动控制的硬件电路,采取了保障患者安全接受治疗的软硬件措施.硬件电路配以相应的软件程序,从而实现腰牵、颈牵、旋转、成角等各种功能.
关键词: IAP15W4K58S4单片机; 牵引理疗床; 液晶显示;
Abstract: A multi-functional traction physiotherapy system for lumbar and cervical traction using IAP15 W4 K58 S4 single chip as the main control chip was designed. The system structure, main functions and working principle of the traction physiotherapy bed were described. The hardware circuit of motion control based on IAP15 W4 K58 S4 single chip computer was analyzed, and the hardware and software measures were taken to ensure patients to receive treatment safely. The hardware circuit was equipped with corresponding software program to realize various functions such as lumbar traction, neck traction, rotation, angulation and so on.
Keyword: IAP15W4K58S4 single chip; traction physiotherapy bed; LCD;
随着生活压力的增加和社会竞争的加剧,身体亚健康的情况越来越普遍,大部分白领、学生、教师经常坐着,没有足够运动,使得肌肉的性能下降,同时久坐也导致腰椎、颈椎长期受到压迫,最终患上颈椎腰椎等疾病.牵引床是针对腰颈椎间盘突出症等腰脊椎病,结合生物力学的原理和中医推拿正骨的手法所研发出的一款牵引理疗设备[1].本文根据牵引理疗床的功能原理,采用IAP15W4K58S4单片机作为主控芯片对床体运动进行控制,设计了一款可以实现腰牵、颈牵、旋转、成角等功能的牵引床.

1 、系统总体设计
1.1、 工作原理
牵引理疗床控制系统以单片机为核心控制部件,加以合适的外围电路来完成控制任务.可提供各种自由度可调节的物理运动,医师据此为患者进行腰颈椎疾病物理治疗.床体分前、后两部分供病人躺卧,使用两个固定带分别将病人腰上、下部固定在前后段.由于人的上半身被固定在床体前段,后段床体在电机驱动下向后运动时,对病人的腰椎就有一定的作用力.床体前部可在电机带动下以腰部处为轴心,做上下成角、左右旋转等运动.床体前部设置一个牵引杆,供颈椎牵引使用.腰椎、颈椎牵引力及成角角度、旋转角度均可在一定范围内任意设定.
1.2 、控制系统组成
图1 系统总体框图
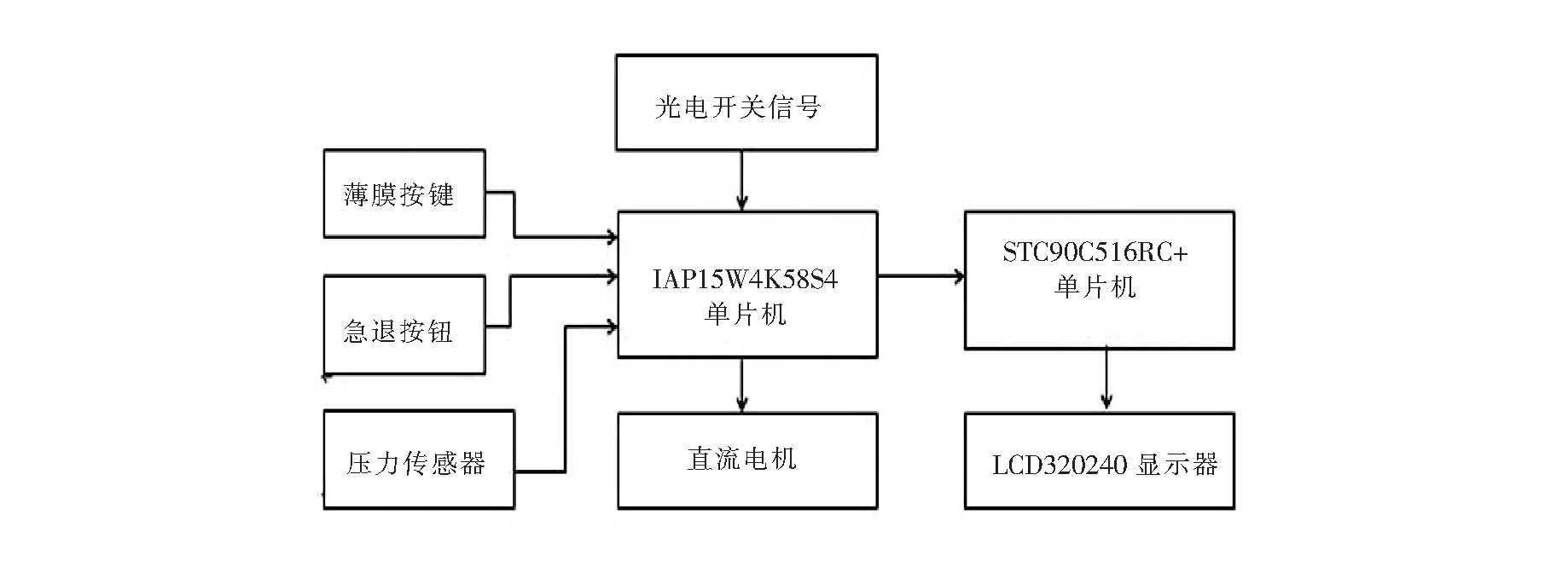
Fig.1 The diagram of general system
系统总体组成框图如图1所示.控制系统选用IAP15W4K58S4单片机作为控制器主芯片.牵引力由S型拉压力传感器[2]采集并进行放大处理,控制器判断并控制直流电机在设定的牵引力作用下运行,从而对腰颈椎病人实施牵引治疗.根据设定的旋转和成角角度,床体进行旋转和成角运动,根据光电开关信号判断床体是否平衡.控制器采用PWM(脉宽调制)信号驱动直流电机运动,牵引力的大小可以通过PWM占空比加以改动.系统采用薄膜4×4矩阵键盘进行数字设定和功能选择.选用LCD320240液晶显示器作为系统显示器.采用串口通信的方式,主芯片将数据发送给STC90C516RC+单片机,由其控制LCD320240液晶显示器显示相应参数.
2、 系统硬件设计
2.1、 控制芯片
本设计以IAP15W4K58S4单片机作为主控芯片,它是目前宏晶科技公司研发并生产的新型的单片机,属于STC15W4K32S4系列.这一系列单片机有很多优势.IAP15W4K58S4单片机内包含内部专用PWM模块、串行口、专用复位电路、电源监控、CPU、EEPROM、硬件看门狗、高精度R/C时钟、中断系统、程序存储器、SPI接口、CCP模块、比较器模块、数据存储器、定时器/计数器、ADC模块等模块.同时IAP15W4K58S4单片机的所有I/O口均有4种工作模式:准双向口、推挽输出、仅为输入(高阻状态)与开漏模式,每个I/O口的驱动能力均可达到20 mA.
在本设计中,选用STC90C516RC+单片机作为LCD320240液晶显示的控制芯片.它是宏晶科技公司研发并生产的一款单片机,属于8051系列.其具有很多优点,如体积小、智能化、低功耗、高性能、超强抗干扰.
2.2 、信号采集
2.2.1、 急退按钮
为了增强安全性能,在后段床体部分设置了一个病人可以自主控制的“急退”按钮.在牵引过程中,病人如感到不适,可以按下急退按钮,牵引床立即停止牵引,床体复位,防止造成损伤.采用光电耦合电路,主控芯片使用外部中断0采集该信号.由于光电耦合电路能够隔离输入与输出信号,信号只能从输入传递到输出,所以具有很强的抗干扰能力.
2.2.2、 光电开关
床体旋转时,主控芯片根据光电开关的输入信号判断床体是否平衡.采用光电耦合电路,将光电开关的信号进行转换,主控芯片使用外部中断1采集该信号.
2.2.3、 实时牵引力信号
牵引治疗时实时牵引力信号由活动床体后部的S型拉压力传感器采集,转换为电压模拟信号.该信号大小与加在传感器上的激励电压以及传感器本身的灵敏度有关.本设计中采用BL2-100 医用传感器,其灵敏度为47.5 mV/V,量程是100 kg.当激励电压是5 V时,传感器输出的最大电压是237.5 mV.该信号经放大电路放大10倍后,输入IAP15W4K58S4片内10位AD转换器.主控芯片每秒采集一次实时牵引力信号,与设定的牵引力进行比较.如果实际牵引力大于设定牵引力,直流电机停止牵引;如果实际牵引力小于等于设定牵引力,直流电机继续牵引.
2.3 、人机交互界面
2.3.1 、矩阵键盘
键盘是实现人机交互的一个重要部分,通过键盘可以向单片机输入各种指令信号,从而完成各种任务.目前比较常见的薄膜键盘有两种,分别是扫描式和行列式(矩阵)两种.本设计采用的是16键矩阵键盘,它可以节约I/O口的使用,从而实现拉力、旋转、成角、时间等设置和各种模式的选择.将键盘的八个引脚与主控芯片IAP15W4K58S4的P2端口相连,并且接一个4.7 kΩ的上拉排阻.
2.3.2 、液晶显示
选用5.7英寸LCD320240A为显示屏幕.该显示器采用COB工艺,不带字库,IC采用RA8835控制,功能强大,稳定性好,功耗低,可以在-20~70 ℃内正常工作.显示器可以显示320×240点阵单色图片或者显示300个字.本设计中LCD 主要显示各种牵引理疗床参数及运行状态.液晶显示电路如图2所示,LCD由单片机STC90C516RC+控制显示.
图2 液晶电路原理图
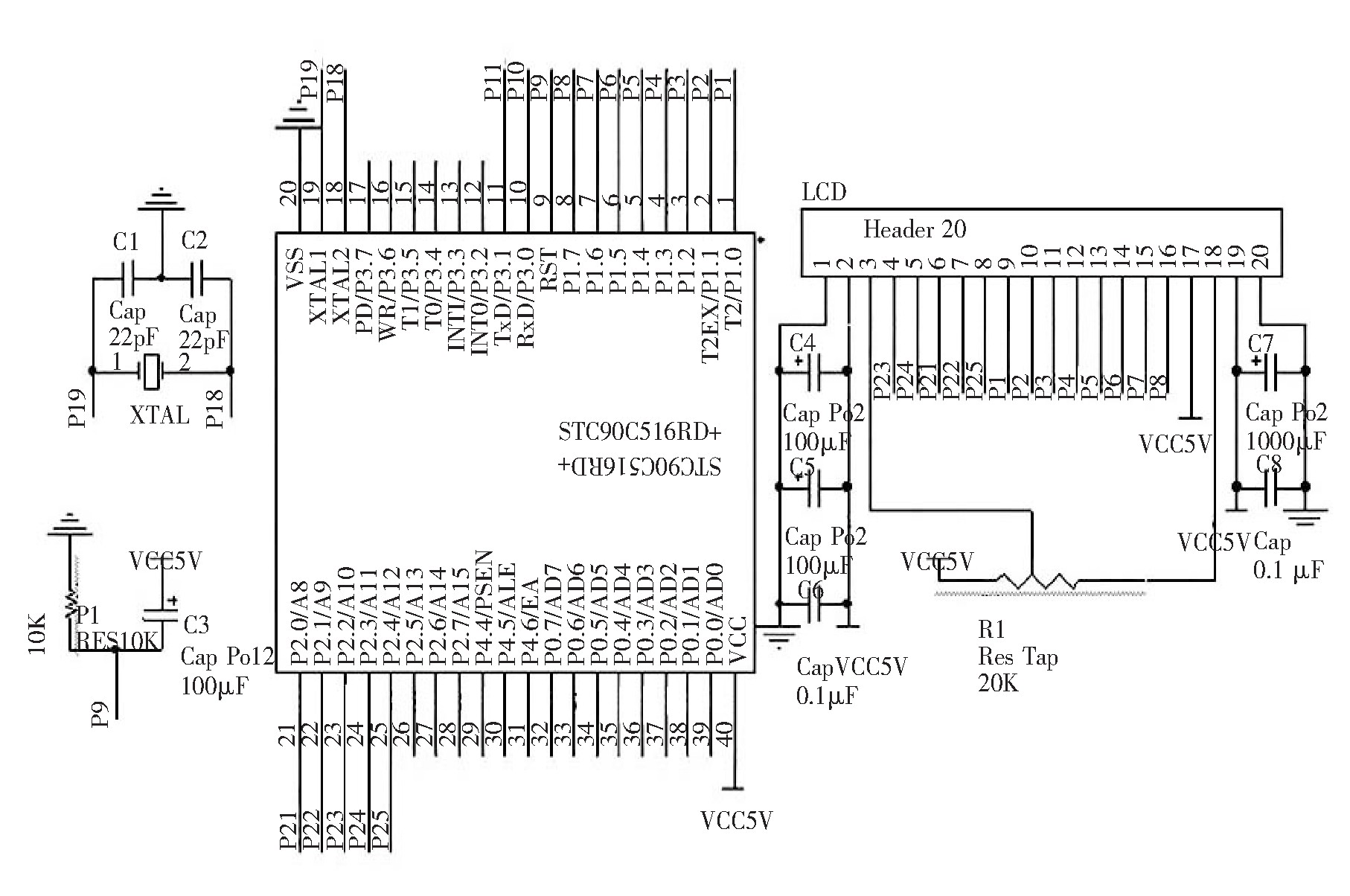
Fig.2 The diagram of LCD schematic
2.4、 直流电机驱动电路
直流电机驱动电路原理图如图3所示,主要由三部分组成:电动推杆、继电器、NPN型三极管.单片机引脚电平状态与控制模式如表1所示.本次设计共用了四组这样的电路,分别实现腰牵、颈牵、旋转、成角等功能.
表1 单片机控制电机模式
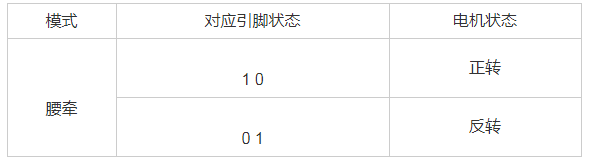
图3 驱动电路原理图
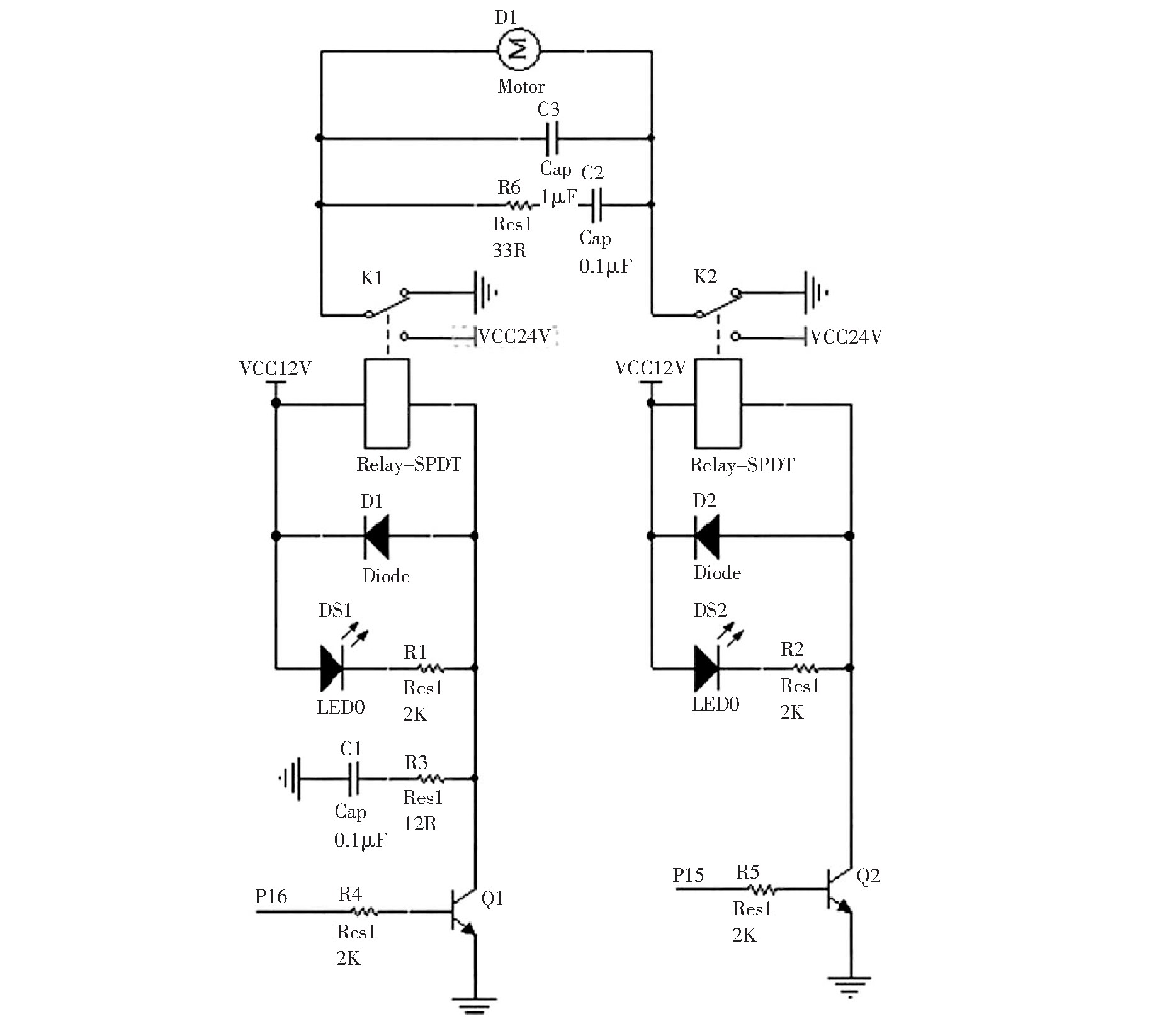
Fig.3 The diagram of drive schematic
3、 软件设计
本设计采用 Keil μVision4 软件进行编程,这是一款为8051系列单片机开发的基于 C 语言的程序开发工具.
软件采用模块化设计.主控芯片IAP15W4K58S4的程序由系统初始化程序、键盘检测程序、A/D模数转换、急退和光电开关的信号采集、电机驱动程序、病例管理、串口通信程序等组成.从芯片STC90C516RC+的程序由系统初始化程序、串口通信程序、LCD驱动显示程序等组成.通信双方所采用的波特率为9 600 bit/s.
3.1、 键盘扫描
主程序中循环执行键盘扫描程序.当设定键按下时,LCD显示界面将切换成设定模式,用户此时可根据病患承受力修改牵引力大小、牵引时间、旋转角度、成角角度等参数.牵引键按下时,牵引床将根据设定的参数进行牵引,同时在液晶显示屏上显示实际牵引力大小和牵引时间.牵引结束后,自动复位.急退键按下时,系统停止牵引,执行急退.
3.2 、串口通信协议
主控芯片对需要显示的数据,是通过一定的数据通信协议传达至从芯片执行的.通信指令依照异步串行数据通信格式制定,包括开始符、指令数据和结束符三部分.从芯片接收数据时,根据字头判断接收到的数据是什么指令,根据结束符判断本次接收是否结束.指令数据传达参数设置与控制信息.
3.3 、PWM信号控制
本控制系统使用PWM信号控制电动推杆的运动[3].一个占空比的PWM信号对应一个转速,根据设定的牵引力,编写程序利用P1.6管脚,输出PWM 信号,达到控制直流电机转速的目的.从P1.6管脚产生PWM 信号,通过继电器电路控制电机运转,改变电枢平均电压大小,进而控制电机转速来控制电动推杆的牵引力大小.
4 、结束语
基于IAP15W4K58S4的牵引理疗床,根据中医推拿正骨原理,以生物力学为依据,通过纠正脊柱椎骨间病变区域达到治疗目的的一种非手术疗法.经过软硬件联合测试,实现了腰牵、颈牵、旋转、成角等功能.本系统已交付厂家(南通医疗器械有限公司)生产,临床使用效果良好.
参考文献
[1] 孙啸威,喻洪流,倪伟.脊椎疾病康复牵引床的研究现状和趋势[J].北京生物医学工程,2017,36(1):102-105,110.
[2] 茹意.多功能智能化牵引床系统设计[D].成都:电子科技大学,2010.
[3] 任云丽,来长胜,白建云.基于PLC的直流电机转速模糊控制系统设计[J].湘潭大学自然科学学报,2017,39(2):114-117.





