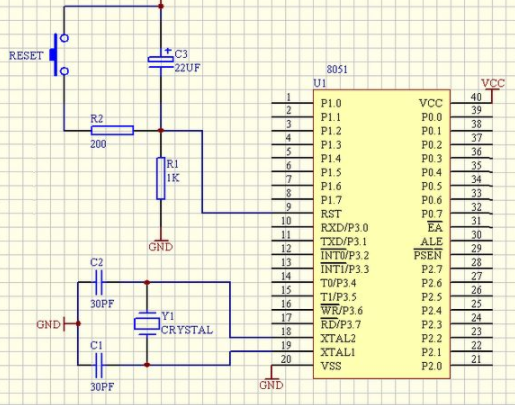
单片机最小系统是指用最少的元件组成的单片机可以工作的系统。 对51系列单片机来说,最小系统一般应该包括:单片机、电源、晶振电路、复位电路。下面我们就为大家介绍一下单片机最小系统论文的范文,供给大家探讨。
单片机最小系统论文范文第一篇:最小单片机系统的超声波测距的设计
作者:邢锋
作者单位:太原理工大学
摘要:本设计设计了最小单片机系统,放弃了设计了复杂的超声波发射电路和回波接收电路设计,采用了最新的HC-SR04超声波收发模块,能够有效改变现有超声波测距信号传递较慢的现状,耗能低,测量精确,生产成本较低,适用于大规模推广使用。基于单片机的超声波测距设计,结构简单,方便使用,精确度高,能够有效的降低障碍物检测到预警的时间,大大提高超声波测距的实用价值。
关键词:STC89C52RC; 单片机; 超声波测距;
1 超声波测距原理概述
倒车雷达系统是否能够很好的实现其功能,在利用超声波进行测距的时候,首先要就需要深入的研究超声波传感器,熟悉其工作原理,才能够更好的实现超声波倒车雷达系统的设计,所述超声波传感器是用超声波作为信息传输媒介的传感器装置,是通过将其他形式的能量转化为超声能的器件。
声波反射是超声波测量距离的原理,利用超声波测量距离,当超声波发射探头发射超声波的同时开始计时,当超声波遇到车后的障碍物的时候,超声波反射回来,然后被超声波接收探头接到,同时停止计时,我们即可通过超声波的传播速度和发射时间和接收时间,进行障碍物和车辆的距离测算。
假设上图中待测距离为H,接收探头和发射探头之间的距离为2M,超声波接收探头和障碍物之间的直线距离用L表示,即可得到
将式(2)带入式(1)得:
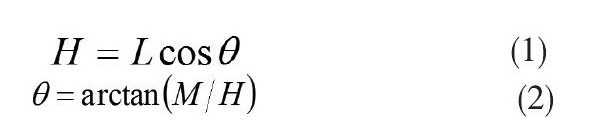
因此,得出接收探头与障碍物的距离

将式(4)带入式(3)可得下面公式:

当待测距离H大于接收探头和发射探头之间的距离一半时,式(5)变为:

因此,在利用超声波测距的时候,尤其是超声波应用到倒车雷达系统的时候,就需要测量预期的距离,所以超声波就需要设定在一个合理的频率里,才能够更好的进行距离测算,因此少超声波的反射和超声波的接收电路就需要更好的设计,本设计经过综合考虑,选取了HC-SR04超声波收发模块作为超声波的测距系统核心构件,经过实验证明,超声波在倒车雷达测距的时候,超声频率设置为40KHz,其测距效果最佳。
2 系统方案的思路
依据超声波的测距原理,为更好的进行倒车雷达设计,本设计首先设计单片机最小系统,然后形成了以单片机为核心结构的倒车雷达系统架。下图为本设计的设计思路图。
2 系统构建与方案设计
2.1系统设计要求
根据超声波倒车雷达的设计思路,在系统构建的时候,将倒车雷达系统分为控制系统和显示预警系统和超声波测距系统三个部分。
2.1.1控制系统的方案设计
在控制系统的选择时,由于设计到相关的数据处理,实时控制等问题,因此主控模块的选择,在整个系统的设计中尤为重要,不仅要求成本较低,结构较小,能耗低,还要求其具有强大的抗干扰能力,且内置有看门狗定时器,以变于在使用的时候,程序自动复位,同时要求其执行指令的速度快,数据处理速度快,因此,本设计综合以上因素,在设计中决定采用8位STC89C52单片机作为控制系统核心结构。

图2 超声波倒车雷达设计思路图
2.1.2显示预警系统方案设计
在倒车雷达系统中,显示器的选择至关重要,不仅要求能够达到倒车雷达显示的需要,还要求和适用于车内,因此,作为广泛应用的显示装置,在选择的时候,主要考虑成本和单片机接口的实际需要,本设计根据设计需要,选用1602液晶屏作为显示器,驾驶员在倒车的时候,1602液晶屏能够通过输出图形和数字为驾驶员进行警示。
预警装置采用的蜂鸣器报警,通过设定的安全距离,进行蜂鸣警示,达到提醒驾驶员的安全倒车的目的。
2.1.3超声波测距系统方案的确定
由于超声波传感器在测距的时候,受到的影响因素较多,因此,选择合适的超声波传感器就是倒车雷达的关键,考虑到汽车在倒车的时候,可能处于各种环境中,因此,本设计建议将超声波传感器安装在车体的后方,建议安装4-6个,均匀分布,本设计选取灵敏度较高,使用性能比较稳定的HC-SR04超声波收发模块作为超声波的测距系统核心构件。下图为超声波测距收发模块的工作框架图
2.1.2超声波测距系统方案的确定
由于超声波传感器在测距的时候,受到的影响因素较多,因此,选择合适的超声波传感器就是倒车雷达的关键,考虑到汽车在倒车的时候,可能处于各种环境中,因此,本设计建议将超声波传感器安装在车体的后方,建议安装4-6个,均匀分布,本设计选取灵敏度较高,可靠性,耗能较低的HC-SR04超声波收发模块。
3 总结
在本设计中,借鉴了广泛的采取线现有各中倒车雷达系统的优点,充分考虑了整个设计的各个方面。经过仿真验证,超声波倒车雷达系统的设计能够满足设计要求。故而本设计是稳定可靠的。
参考文献
[1]刘鑫,朱靖玉。基于单片机的倒车雷达的设计[J].电子设计工程,2012,01:94-97.
文献来源:邢锋。 最小单片机系统的超声波测距的设计[J]. 信息化建设,2016,(07):312.
单片机最小系统论文范文第二篇:MC9S12XS128单片机最小系统设计
作者:周刚,杨永平,杨金峰
作者单位:陕西理工学院陕西省工业自动化重点实验室
摘要:本课题基于对单片机最小系统的研究, 在现有汽车电子控制技术的基础下, 通过对汽车电控系统的学习, 完成对单片机电路设计、时钟电路设计、电源电路设计、通讯电路设计 (串口、CAN) .
关键词:汽车电子; 单片机电路设计; 时钟电路设计; 通讯电路设计;
作者简介: 周刚: (1990-) , 男, 河南省遂平县人, 陕西理工学院硕士研究生, 主要研究方向为太阳能-地源热泵地层储能的设计与研究。; 杨永平: (1956-) , 男, 陕西省汉中市人, 陕西理工学院教授, 硕士生导师, 主要研究方向为太阳能制冷空调。;
1 前言
目前世界轿车95%以上都采用了电子控制。在我国, 从70年代才开始此领域的研究, 研究开发和生产能力还相当的薄弱, 只有欧洲国家70年代的水平。通过对汽车电控系统的学习以及其在多内外发展的对比情况, 深刻认识到国内汽车电子发展的不足。因此我们必须认识自己的不足, 努力学习国外先进技术, 开拓创新, 形成自己独有的技术, 为我国汽车电子事业做出巨大的贡献。本课题就是在此情况下提出的, 由于目前大多数汽车发动机还以汽油机为主, 因此在本论文中主要针对汽油机的电子控制技术进行研究的。
2 原理图的绘制
首先启动Altium Designer release 10, 然后单击工具栏[文件]-[新建]-[原理图], 把原理图重新命名为"最小系统"并保存到新建的工程文件夹中。根据所需要的元器件从库中寻找, 然后拖动放到原理图工作区域中, 然后进行原理图的布线。然后对封装所有的元器件进行封装, 根据各元器件的引脚的控制功能以及控制的对象不同建立相关的连接。然后单击工具栏的[工程]-[Compile Document最小系统。SchDoc]检查原理图是否有错, 有错则可根据相关提示进行更改。
3 PBC板的设计
将画好的原理图导入PCB板, 进行PCB板的制作。首先单击工具栏[文件]-[新建]-[PCB], 重命名并保存到和原理图一个工程中。然后在单击工具栏中的[设计]-[Update PCB Document PCB.Pcb Doc], 弹出工程更改顺序菜单栏, 单击生效更改, 查看是否有错误, 若有错则可根据相关提示进行更改, 若没有错则单击执行更改将原理图成功导入建好的PCB板中。接下来进行元器件的摆放, 根据元器件的性质以及为了方便走线将已有的元器件正确的摆放到PCB的有效工作区域内。然后根据规则进行连接与布线。
4 电源电路设计
MC9S12系列单片机的外部供电电压为5V, 分别为单片机的内部电压调整器, IO端驱动器, AD转换器提供电源, 详细情况如下:
使用5v供电的端口有: (1) VDDR (41引脚) , 接+5V, VSSR (40引脚) , 接地, 内部电压调整器供电端; (2) VDDA (83引脚) , 接+5V, VSSA (86引脚) , 接地, AD转换器供电端; (3) VDDX (107引脚) , 接+5V, VSSX (106引脚) , 接地, IO驱动供电端。
使用2.5v供电的端口有 (内部电压调整器开启时不必进行外部供电) : (1) VDDPLL (43引脚) , 接+2.5V, VSSPLL (45引脚) , 接地, 锁相环供电端。 (2) VDD1 (13引脚) , 接+2.5V, VSS1 (14引脚) , 接地, 内部电源供电端1; (3) VDD2 (65引脚) , 接+2.5V, VSS2 (66引脚) , 接地, 内部电源供电端2.
5 时钟电路设计
一般情况外部时钟都是由时钟振荡电路提供的, 时钟振荡电路又分为无源时钟电路和有源时钟电路;无源时钟电路由2个22p F的电容和2个分别为5M和1K的电阻和1个16MHZ晶振构成, 2个电容都是一端接地另一端连接晶振的管脚, 晶振和2个电阻连接后引入单片机的EXTAL和XTAL引脚;有源的时钟电路采用的是有源晶振, 内部有震荡电路, 当通上电源后电路可以自己产生标定的频率信号。
6 通讯电路设计
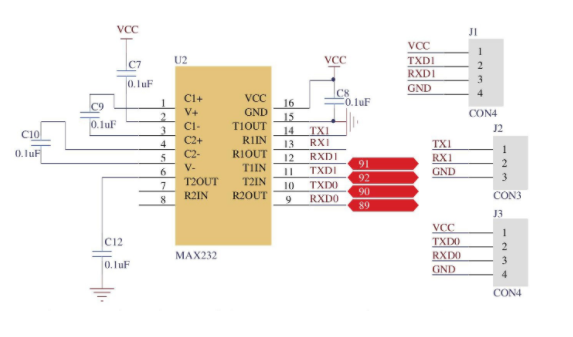
MC9S12XS128单片机的RS232串行通讯电路设计需要使用2个串行通讯口, 而单片机在与PC的通讯中, 由于电脑的串口信号线为正负逻辑关系, 这与单片机的逻辑信号电压定义不同, 这样就需要对两者之间信号进行电平转换。接下来是对应MC9S12XS128单片机与MAX232的电路原理图, 如下图:
图中的RXD0 (串行接0) , TXD0 (串行发0) 分别接单片机的PS0 (89引脚) 和PS1 (90引脚) .我们只用了串行接口的3个引角, 其中2引脚为串行发送, 接MAX232的14引角, 3引脚为串行接收, 接MAX232的13引角, 5引角接地。
7 结论
本文主要是基于MC9S12XS128单片机最小系统的研究, 了解单片机的构成及整车系统的结构。通过对单片机电源电路设计、时钟电路设计、通讯电路设计, 对9S12单片机最小系统有了深刻的认识, 清楚了最小系统的构成以及各引脚的功能。通过这次设计, 也加深了对汽车电子的认识, 为以后我国的汽车电子发展增强了信念。
参考文献
[1]张阳。MC9S12XS单片机原理及嵌入式系统开发。北京:电子工业出版社, 2011.
[2]凌永成。汽车电子控制技术 (第二版) .北京:北京大学出版社, 2011.
[3] 任勇。单片机原理及应用:使用Freescale S12X构建嵌入式系统。北京:清华大学出版社, 2012.
[4]付官星, 车兔林。发动机ECU电源系统电路设计。汽车实用技术[J], 2013.
[5] 罗峰。汽车CAN总线系统原理、设计与应用[M].北京:电子工业出版社, 2010.
文献来源:周刚,杨永平,杨金峰。 MC9S12XS128单片机最小系统设计[J]. 时代汽车,2016,(06):46+48.





