摘 要: 目的 针对轻工业、食品行业中被抓取对象物性多样、尺寸范围较大等问题, 设计一种通用的欠驱动柔性机械手。方法 根据机械手需要满足的功能设计机械手结构, 运用Matlab软件中的Fsolve函数求解机械手中指节、指尖节相对转角与笔形气缸压力的关系, 并以此绘制机械手的工作空间图, 建立机械手的简化抓取模型, 并以500 mL的啤酒、160 mL的可乐为抓取目标进行机械手抓取计算。结果 机械手的尺寸自适应连续宽度范围为0~200 mm, 在适应被抓物体尺寸大小的同时可以对机械手与物体间的接触力进行精确控制。结论 设计的机械手抓取范围较大, 装有扭弹簧的串联双铰链结构使机械手无需传感器就可以实现对目标的可靠抓取。
关键词: 机械手; 抓取范围; 工作空间; 抓取模型分析;
Abstract: The work aims to design a general underactuated flexible manipulator, with respect to the problem that the object to be grasped in the light industry and food industry has various physical properties and a large size range. The manipulator structure was designed according to the function that the manipulator needed to meet. The Fsolve function in Matlab software was used to solve the relationship between the relative rotation angle of the middle finger and fingertip of the manipulator and the pressure of the pen-shaped cylinder, based on which the workspace drawing of the manipulator was drawn. The simplified grab model of the manipulator was established, and the grab calculation of the manipulator was carried out with 500 mL beer and 160 mL cola as the grab targets. The size adaptive continuous width range of the manipulator was 0-200 mm, which could accurately control the contact force between the manipulator and the object while adapting to the size of the object to be grasped. The designed manipulator has a large grab range, and the series double hinge structure installed with torsion spring enables the manipulator to achieve reliable grabbing of the target without sensors.
Keyword: manipulator; grab range; workspace; grab model analysis;
针对轻工、农产品行业在分拣、包装、搬运[1,2,3,4,5]等环节中被抓取对象尺寸范围大、物性变化大、形状多变等问题[6], 急需抓取复杂对象的机械手。由Laval大学和加拿大MD ROBOTICS公司合作开发的欠驱动机械手[7], 该机械手有3个手指, 每个手指由3个指节组成, 靠弹簧的弹性变形来适应物体的形状与大小。该机械手无法控制机械手手指与被抓物体间的接触力, 抓取时可能会破坏被抓物体表面。美国约翰霍普金斯大学所研发Modular机械手[8]有26个关节, 该机械手可以对复杂对象进行可靠的抓取。拟人机械手价格昂贵、维护成本大, 不太适用于轻工、食品行业。文中提出的柔性欠驱动机械手有2个驱动, 步进电机精确控制机械手的指根节转动角度可以使机械手具有很大的尺寸适应性, 气缸推动含扭弹簧铰链[9,10]的弹性协调转动, 可以满足抓持力需求。该机械手无需传感器就可以精确地控制物体与机械手手指间的接触力且机械手对被抓取物体形状、尺寸适应性好。

1 机械手结构及工作原理
机械手结构示见图1, 机械手结构主要由驱动传动结构和手指结构2个部分组成。
图1 机械手结构Fig.1 Manipulator structure
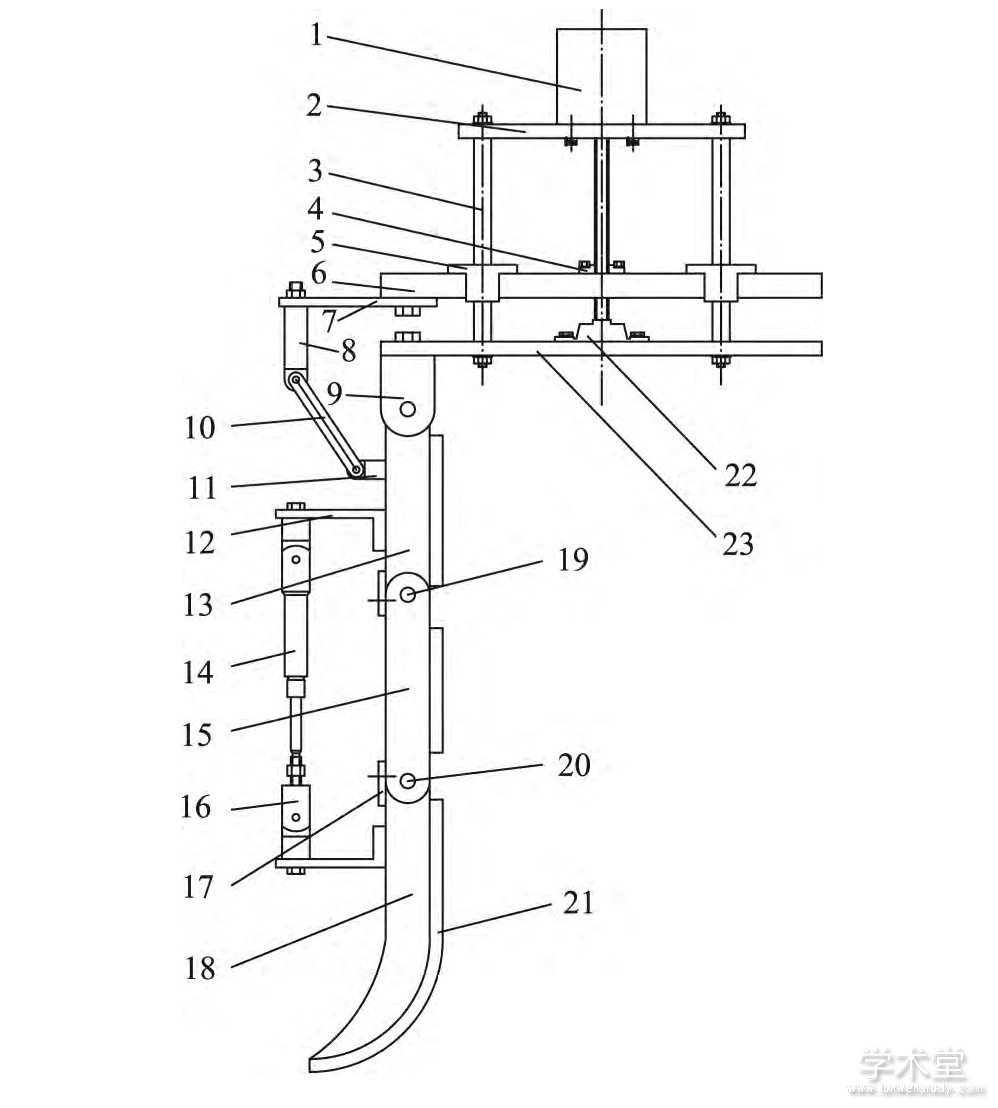
1.丝杆步进电机2.电机固定盘3.支撑导柱4.丝杆螺母5.直线轴承6.运动盘7.推杆固定板8.推杆9.手指座10.二力杆11.单耳座12.L型板13.指根节14.带双耳座笔形气缸15.中指节16.双耳座连接件17.防反转限位板18.指尖节19.小扭弹簧20.大扭弹簧21.防滑橡胶条22.带座轴承23.手指固定盘
驱动传动结构:电机固定盘2与手指固定盘23通过2根支撑导柱3连接, 支撑导柱3穿过运动盘6上的直线轴承5;丝杆步进电机1通过螺钉固定在电机固定盘2上, 丝杆的末端固定在手指固定盘23的带座轴承22上, 丝杆步进电机1的丝杆通过丝杆螺母4与运动盘6连接;推杆固定板7通过螺钉固定在运动盘6上, 推杆8的一端车出螺纹通过螺母固定在推杆固定板7上, 二力杆10的一端与推杆8通过销轴连接, 二力杆10的另一端通过销轴与单耳座11连接, 单耳座11通过螺钉固定在指根节13上;带双耳座笔形气缸14的双耳座部分与单耳座通过销轴连接, 单耳座通过螺钉固定在L型板12上, 双耳座连接件16的螺纹孔与带双耳座笔形气缸14的螺纹部分配合, 双耳环连接件16与单耳座通过销轴连接。
手指结构:机械手的3个柔性手指呈120°分布, 每个柔性手指由3个指节组成。手指座9通过螺钉固定在手指固定盘22上, 指根节13通过销轴与手指座9连接, 中指节15通过销轴与指根节13连接, 指尖节18通过销轴与中指节连接, 中指节15、指尖节18的销轴上分别装有小扭弹簧19和大扭弹簧20, 防反转限位板18通过螺钉固定在中指节15上, 3个指节的内侧均装有防滑橡胶条21。
工作原理:丝杆步进电机1带动丝杆转动, 由于支撑导柱3对丝杆螺母4有限制作用, 丝杆螺母4带动运动盘6上下运动, 从而带动推杆8运动, 改变指根节13和手指座9的夹角。丝杆步进电机1正转, 带动运动盘6向下运动, 从而推杆向下运动使得指根节13与手指座9间的夹角增大, 丝杆电机1反转, 指根节13与手指座9间的夹角变小;气缸压力增大推动手指克服小扭弹簧19的弹性力, 中指节15开始转动, 气缸压力继续增大推动手指克服小扭弹簧19、大扭弹簧20的弹性力, 中指节15、指尖节18开始转动。丝杆步进电机1驱动指根节转动到预定角度, 气缸压力达到预定值, 机械手抓持物体。电机断电螺杆螺母机构自锁、同时笔形气缸保压, 可以保持抓持力不变。
2 机械手单个手指的工作空间计算
机械手尺寸:指根节长度l1=60 mm, 中指节长度l2=65 mm, 指尖节长度l3=60 mm, L型板到铰链中心B的距离c=30 mm, L型板的高度h=35 mm, 指尖节圆弧部分r=25 mm, 手指座安装中心距L=50mm。
扭弹簧参数:大扭弹簧刚度k1=0.299 44 N·m/rad, 小扭弹簧刚度k2=0.117 27 N·m/rad, 大扭弹簧预紧角θ01=0.659 58 rad, 小扭弹簧预紧角θ02=0.136 40 rad。
机械手单个手指简化力学模型见图2, A点为手指座铰链中心, B, C 2点为2个铰链的中心, 以通过机械手手掌中心的垂线为y轴、过A点的水平线为x轴, 建立坐标系。
计算机械手空载运动[11,12]过程中临界转动气压:
图2 机械手单个手指简化力学模型Fig.2 Simplified mechanical model of manipulator's single finger
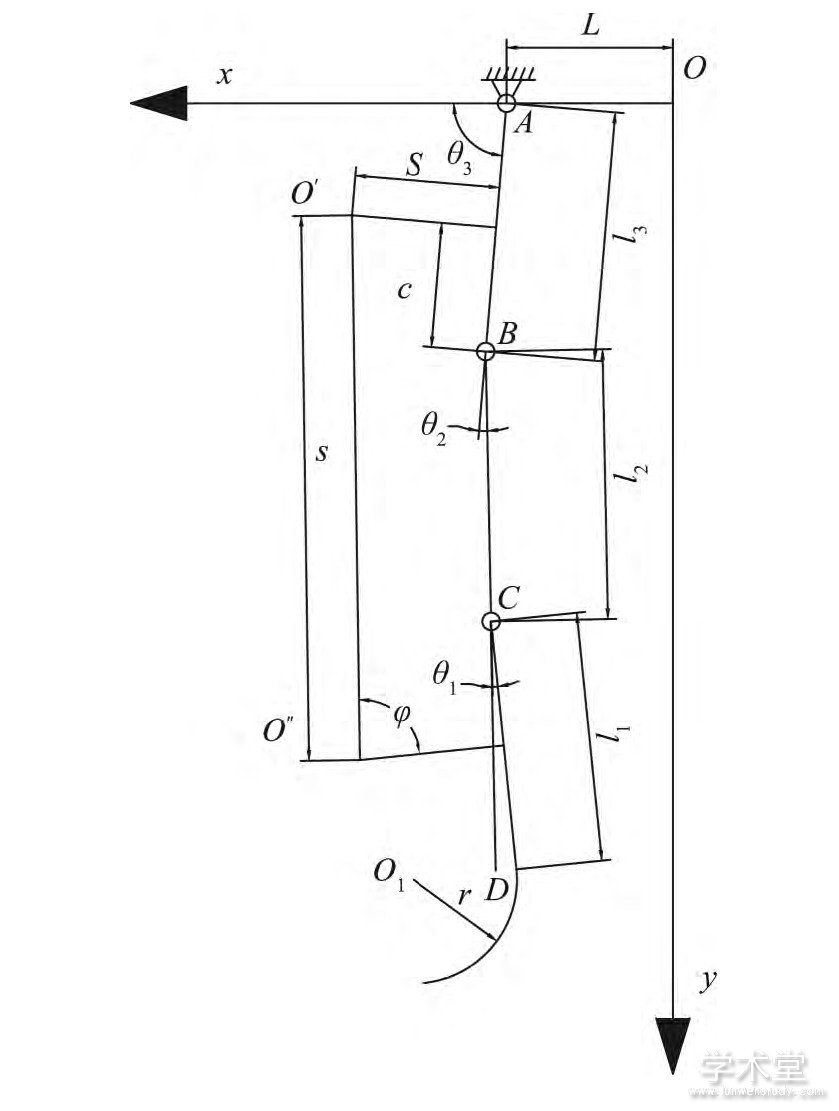
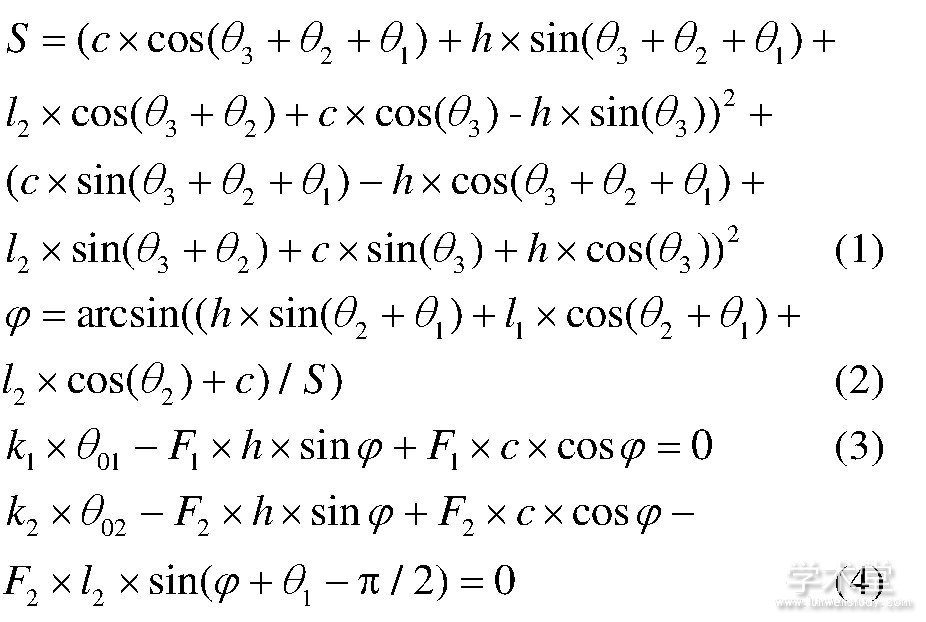
式中:F为气缸的推力;S为笔形气缸2个安装中心的距离;φ为气缸轴线与L形板间的夹角;θ3为指根节与x轴形成的夹角;θ2为中指节与指根节的相对转角;θ1为指尖节与中指节形成的相对转角。
假设中指节转动角度为0时, 求解气缸的推力为k1×θ1/c;带入数据得指尖节临界转动气压为p1=0.08382 MPa。
假设指尖节转动角度为0时, 求解气缸的推力为k2×θ2/ (c-12sin (φ-π/2) ) ;带入数据得中指节节临界转动气压为p2=0.005 81 MPa。
由于中指节的临界转动气压p2小于指尖节的临界转动气压p1, 所以中指节比指尖节先转动。
计算只有中指节转动时的转动角度:
计算指尖节在中指节转动的情况下的临界转动气压:
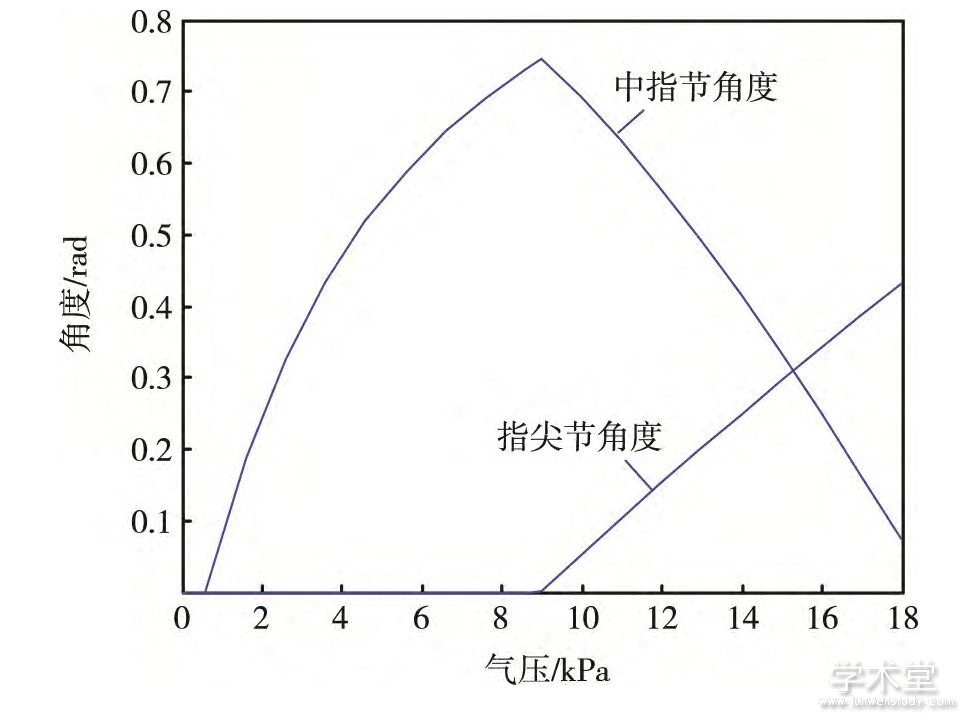
用Matlab软件的中的Fsolve函数计算得:在气压为0.089 93 MPa时指尖节开始转动, 此时中指节相对转角为0.730 01 rad。
计算中指节、指尖节的转动角度:
根据计算公式绘制机械手指尖节、中指节相对转角与气压的关系见图3。
图3 机械手中指节、指尖节相对转角与气压的关系Fig.3 Relationship between the relative angle of the phalanx and the fingertip of the manipulator and the air pressure
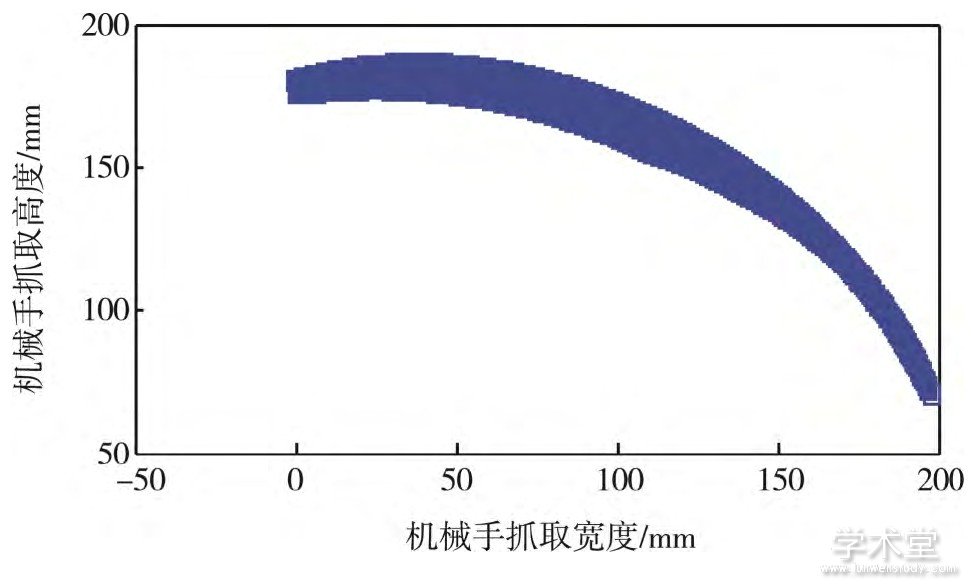
根据机械手与物体接触点坐标与气压、指根角间的关系绘制机械手工作空间[13]见图4。
图4 机械手工作空间Fig.4 Manipulator workspace
3 机械手指尖捏取圆柱模型分析及实物抓取计算
3.1 机械手单个手指抓取物体静载力学模型
机械手静载过程:机械手指根节转动到计算的角度, 笔形气缸压力增大, 中指节、指尖节转动[14]。机械手接触被抓物体且接触力不断增大, 达到预定压力时机械手与被抓物体间的接触力达到所设的预定值。机械手静载受力分析见图5。
图5 机械手单个手指静载受力分析Fig.5 Static load force analysis of manipulator's single finger
根据机械手几何关系, 接触力N对铰链中心B的力臂:
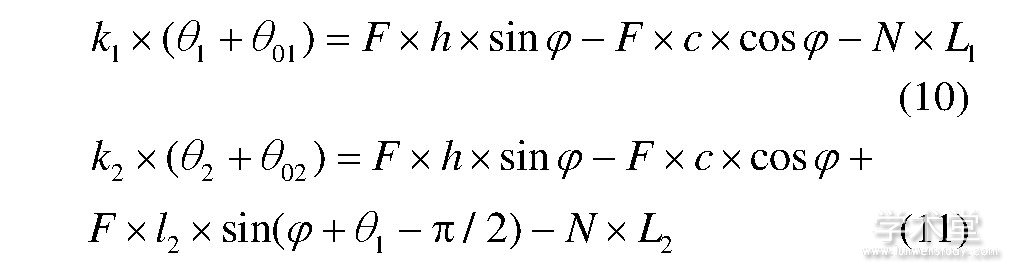
接触力N对铰链中心C的力臂:
抓取对象为半径为R的圆柱:
3.2 机械手抓取物体悬停力学模型
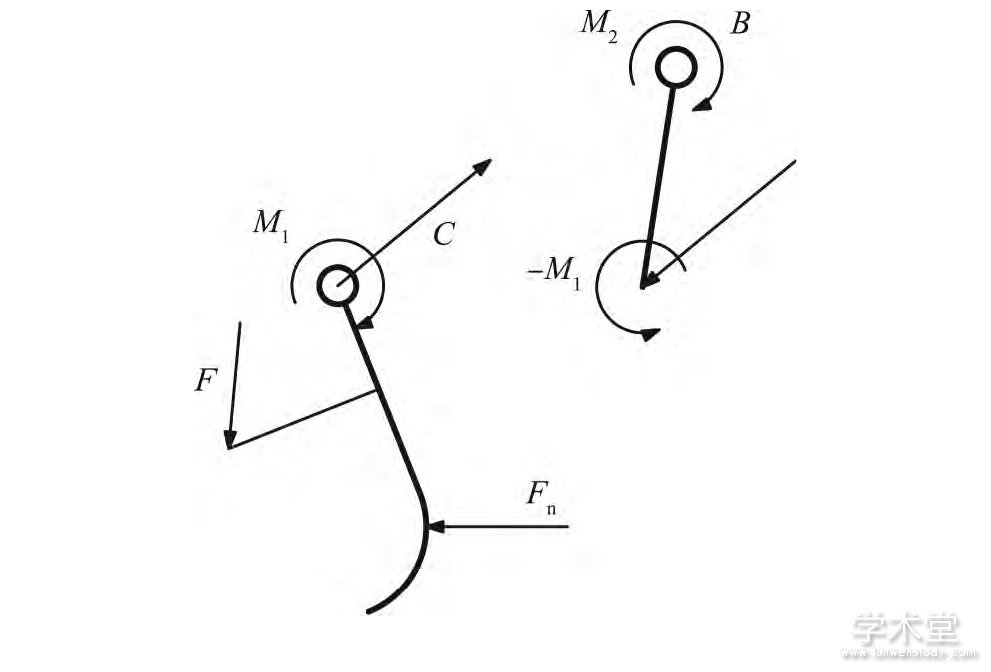
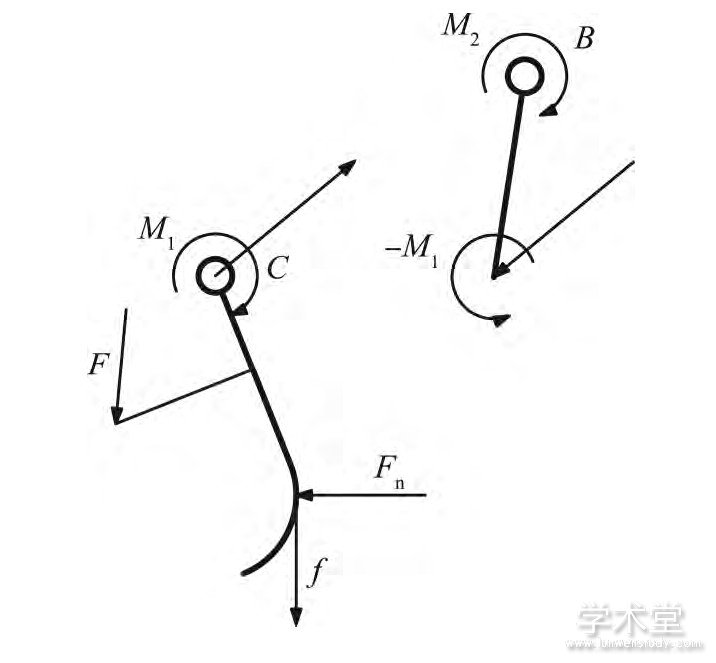
机械手悬停状态:机械手与被抓物体间的接触力达到预定值, 匀速提起被抓物体。由于被抓物体的重力作用, 机械手与被抓物体间的接触力与接触点位置发生变化。机械手悬停受力分析见图6。
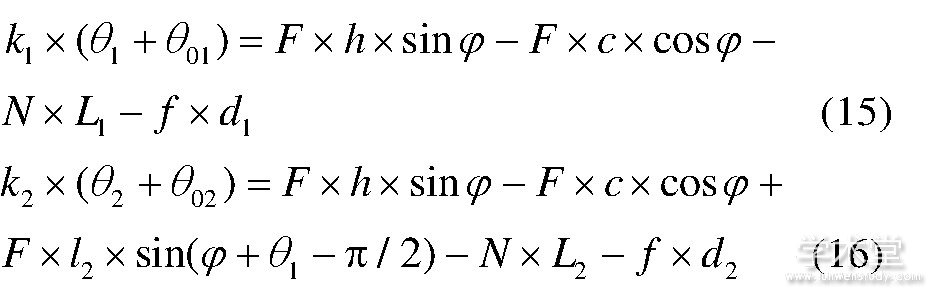
根据机械手几何关系, 摩擦力f对指尖节铰链中心的力臂:
摩擦力f对中指节铰链中心的力臂:
图6 单个手指悬停受力分析Fig.6 Hover force analysis of a single finger
3.3 灌装饮料抓取验证
常见灌装饮料规格见表1。
表1 常见饮料规格Tab.1 Common beverage specifications
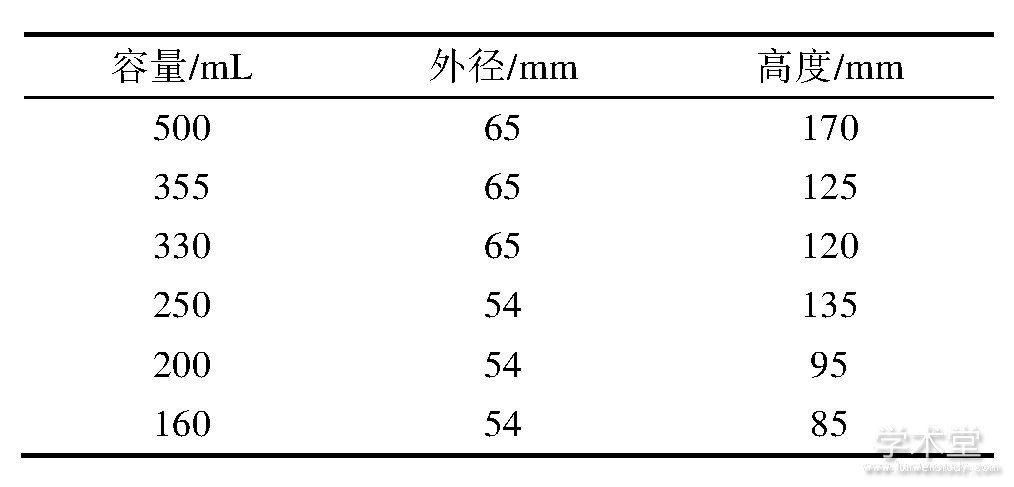
以抓取500 mL容量的啤酒、160 mL容量的可乐为抓取对象。对2种灌装饮料称量得:500 mL的啤酒的质量约为0.521 kg, 160 mL的可乐约为0.172 kg。铝制饮料罐与橡胶的摩擦因数μ为0.61[15]。取安全系数s为1.2。
抓取500 mL啤酒所需的接触力为:m1g×s/ (3μ) , 带入数据得所需接触力为3.344 85 N。
抓取160 mL可乐所需的接触力为:m2g×s/ (3μ) , 带入数据得所需接触力为1.105 31 N。
抓取对象为500 mL的啤酒时, 机械手抓取半径为32.5 mL、接触力为3.4 N;抓取对象为160 mL的可乐时, 机械手抓取半径为27 mL、接触力为1.2 N。
使用Matlab软件的Fsolve函数进行计算:抓起160 mL可乐饮料时:机械手所需最小气压为0.16MPa, 指根节转动角度为1.290 729, 中指节相对角度为0.530 501 rad, 指尖节相对角度为0.120 921 rad;抓起500 mL啤酒时, 机械手所需最小气压为0.2MPa, 指根节转动角度为1.549 433, 中指节相对转角为0.109 601 rad, 指尖节相对转角为0.121 713 rad。
4 讨论
1) 分析文中各计算公式, 其基本构成均为一次正余弦函数, 所以方程组的解是连续的。
2) 数控机床的应用可以保证机械手零部件的加工精度, 但同一批次的扭弹簧由于材料、制造误差以及热处理等原因会存在一定的误差, 取扭弹簧参数误差为±10%。
3) 扭弹簧的刚度及初始角 (预紧角) 为影响机械手抓取性能的主要参数。分析扭弹簧参数的4种极限状态 (小扭弹簧、大扭弹簧参数均取最大值;小扭弹簧、大扭弹簧参数均取最小值;小扭弹簧参数取最大值、大扭弹簧参数取最小值;小扭弹簧参数取最小值、大扭弹簧参数取最大值) 对机械手的影响。
扭弹簧参数4种极限状态对机械手工作空间的影响见图7。
分析图7可得, 扭弹簧参数的误差对机械手工作空间影响不大, 机械手抓取宽度、抓取高度范围变化很小。
扭弹簧参数4种极限状态对机械手抓取160 mL可乐饮料、500mL啤酒时的预定接触力的影响见表2。
使用Matlab软件的Fsolve函数计算:抓取500mL啤酒饮料罐时, 控制笔形气缸气压为0.2 MPa, 指根节角度为1.549 433 rad;抓取160 mL啤酒饮料罐时, 控制笔形气缸气压为0.16 MPa, 指根节角度为1.290 729 rad。
图7 扭弹簧参数4种极限状态机械手工作空间Fig.7 Manipulator workspace map in four limit states of torsion spring parameters
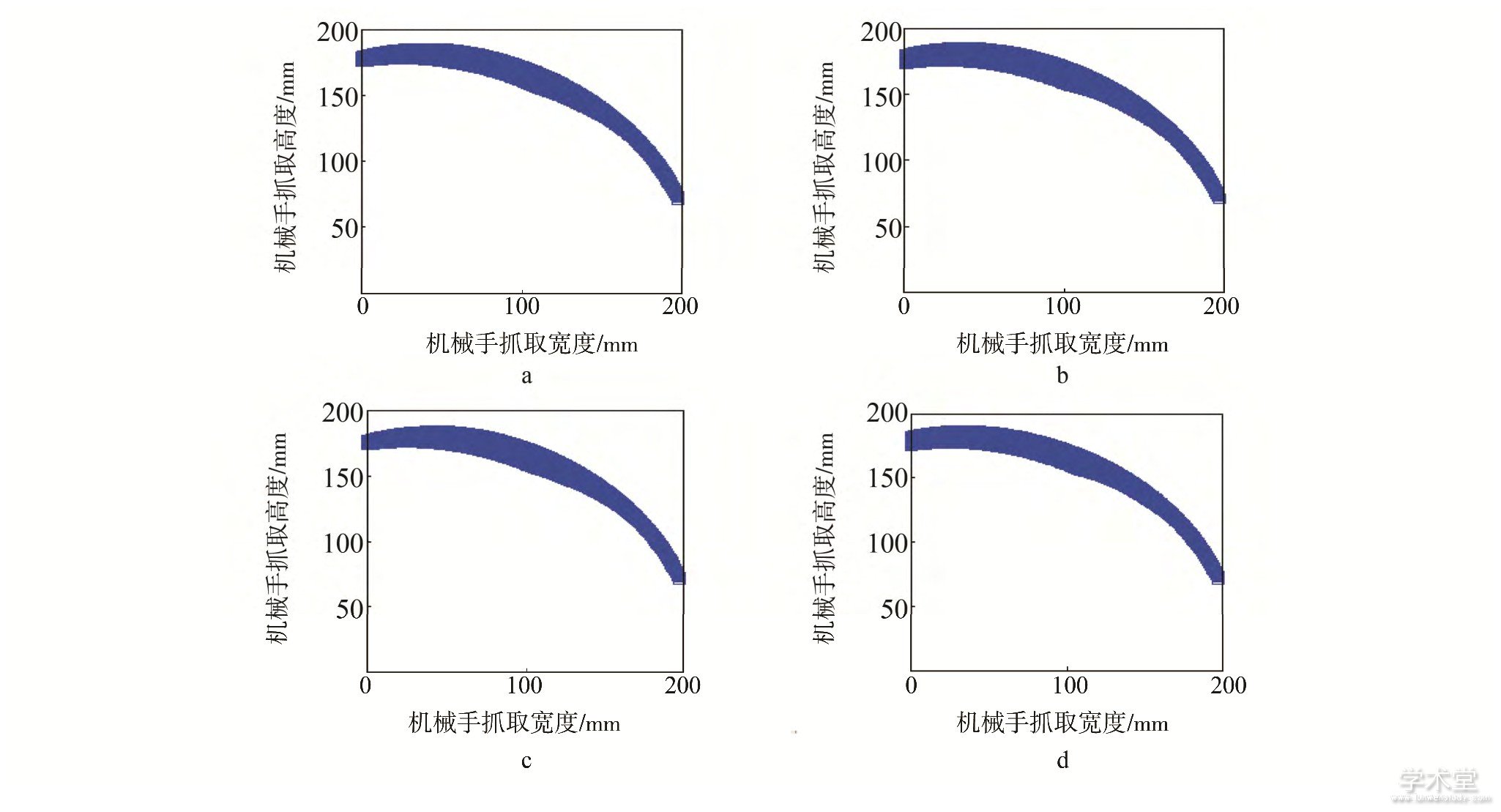
表2 抓取2种规格饮料罐时接触力随扭弹簧参数变化Tab.2 Change of contact force with torsion spring parameters when grabbing the beverage cans of two specifications
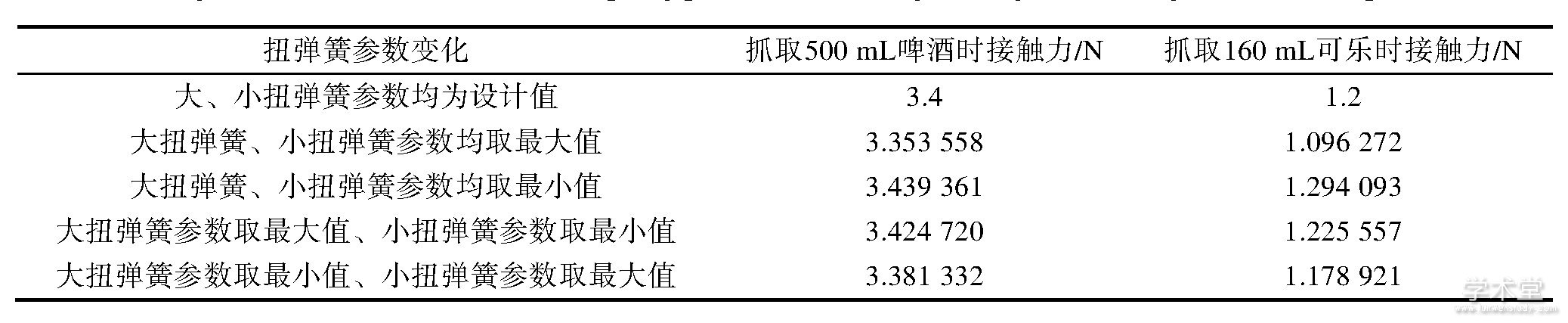
由上可得出结论:大、小扭弹簧参数均取最大值时接触力最小, 大、小扭弹簧参数均取最小值时接触力最大。由于扭弹簧参数的误差, 导致抓取500mL啤酒饮料罐时, 机械手与饮料罐间的接触力偏差为-1.37%~1.16%。由于扭弹簧参数的误差, 导致抓取160 mL可乐饮料罐时, 机械手与饮料罐间的接触力偏差为-8.64%~7.84%。扭弹簧参数的误差会影响机械手对物体的抓取, 需要在安装大、小扭弹簧前测定扭弹簧的实际值, 并根据实际值更新机械手的计算公式。
5 结语
电气复合驱动柔性欠驱动机械手, 指根节由步进电机驱动、笔形气缸推动2个含扭弹簧的指节协调转动。指根节的精确调整使得机械手具有很好的尺寸适应性, 带扭弹簧的串联双铰链结构可以很好地控制机械手与被抓物体间的接触力。机械手配合视觉系统在无需传感器的条件下就可以实现对复杂对象进行可靠抓取。
参考文献:
[1]WANG Ke, ZHOU Ji-ping.Kineatical Analysis and Simulation of High-speed Plate Carrying Manipulator Based on MATLAB[J].Mechanical Design and Manufacturing Engineering, 2012, 4 (12) :850-856.
[2]李国昌, 赵成, 李蕊, 等.某自动化流水线搬运机械手的仿真与试验分析[J].包装工程, 2018, 39 (15) :166-172.LI Guo-chang, ZHAO Cheng, LI Rui, et al.Simulation and Experimental Analysis of a Auto Production Line Handling Manipulator[J].Packaging Engineering, 2018, 39 (15) :166-172.
[3]童俊华, 程培林, 武传宇, 等.堆聚态采血针管自动分料拾取机械手研究[J].包装工程, 2018, 39 (3) :124-129.TONG Jun-hua, CHENG Pei-lin, WU Chuan-yu, et al.Research on Automatic Sorting and Picking Manipulatorfor Stacked Polymeric Lancet Tubes[J].Packaging Engineering, 2018, 39 (3) :124-129.
[4]张碧涛, 何卫锋.一种包装堆垛机械手的结构优化[J].包装工程, 2017, 38 (7) :142-145.ZHANG Bi-tao, HE Wei-feng.Structural Optimization of a Packaging and Stacking Manipulator[J].Packaging Engineering, 2017, 38 (7) :142-145.
[5]张聪.罐头装箱组合式机械手设计[J].包装工程, 2016, 37 (19) :163-167.ZHANG Cong.Design of Canned Packing Combined Manipulator[J].Packaging Engineering, 2016, 37 (19) :163-167.
[6]田志伟.一种可变约束欠驱动机械手的设计研究[D].无锡:江南大学, 2016.TIAN Zhi-wei.Design and Research of a Variable Constrained Underactuated Manipulator[D].Wuxi:Jiangnan University, 2016.
[7] 新浪科技.机械手臂让残障人士意念取物:26个关节可举重物[DB/OL]. (2015-5-27) [2018-07-21].http://tech.huanqiu.com/photo/2015-05/2778692.html.Sina Technology.Robotic Arm Allows People with Disabilities to Take Objects:26 Joints Can Lift Weights[DB/OL]. (2015-5-27) [2018-7-21].http://tech.huanqiu.com/photo/2015-05/2778692.html.
[8]LALIBERTE T G, CLEMENT M, GOSSELIN C M, et al.Underactuated Mechanical Finger with Return Actuation:CA 2209863[P].2006-10-03.
[9]熊强, 章军, 陈春华, 等.柔性快递包装盒的分拣机械手结构设计[J].机械设计与制造, 2014 (10) :69-72.XIONG Qiang, ZHANG Jun, CHEN Chun-hua, et al.Structural Design of Sorting Manipulator for Flexible Express Box[J].Machinery Design&Manufacture, 2014 (10) :69-72.
[10]章军.六关节三指苹果抓持机械手的自适应柔性分析[J].农业工程学报, 2010, 26 (1) :140-144.ZHANG Jun.Six Joint Tridactylism Apple Grasping Manipulator a Daptive Flexibility Analysis[J].Journal of Agricultural Engineering, 2010, 26 (1) :140-144.
[11]LI Y, XU Q.Development and Assessment of a Novel Decoupled XY Parallel Micro-positioning Platform[J].IEEE Trans Mecha, 2010, 15 (1) :125-135.
[12]YONG Y K, LU T F.Kinetostatic Modeling of 3-RRRCompliant Micro-motion Stages with Flexure Hinges, Mach[J].Theory, 2009, 44 (6) :1156-1175.
[13]崔国华, 袁会长, 颜亮, 等.串联机械手工作空间的求解[J].机械设计与制造, 2013 (10) :182-183.CUI Guo-hua, YUAN Hui-chang, YAN Liang, et al.Solution of Working Space of Tandem Manipulator[J].Machinery Design&Manufacture, 2013 (10) :182-183.
[14]王守城, 王熙, 段俊勇, 等.基于MATLAB的冲床上下料机械手运动学分析[J].机械设计与制造工程, 2018, 47 (6) :9-13.WANG Shou-cheng, WANG Xi, DUAN Jun-yong, et al.Kinematics Analysis of Punching Robot Based on MATLAB[J].Machinery Design and Manufacturing Engineering, 2018, 47 (6) :9-13.
[15] 百度文库.摩擦系数表[DB/OL]. (2018-06-30) [2018-07-21].https://wenku.baidu.com/view/539b448fbceb19e8b8f6ba52.html.Baidu Library.Friction Coefficient Table[DB/OL]. (2018-06-30) [2018-07-21].Https://wenku.baidu.com/view/539b448fbceb19e8b8f6ba52.html.





