机械手臂论文研究热点范文8篇之第四篇:一种翻转装卸用机械手臂的设计与实现
摘要:本文主要介绍了一种翻转装卸用机械手臂的设计与实现, 该机械手臂包括机械臂与底板、下机械臂、推管、液压、电机、转轴、定位柱等装置, 能够适用于较重、表面容易破损的物品的搬运和传递。该设计的主要特点由上机械臂与下机械臂组成, 其中下机械臂用于物品的定位与固定, 而上机械臂则用于物品的紧固以及再定位。
关键词:机械手臂; 翻转; 液压缸;
1 前言
机械手臂是目前在机械人技术领域中得到最广泛实际应用的自动化机械装置, 在工业制造、医学治疗、娱乐服务、军事、半导体制造以及太空探索等领域都能见到它的身影。尽管它们的形态各有不同, 但它们都有一个共同的特点, 就是能够接受指令, 精确地定位到三维或二维空间上的某一点进行作业。对于大多数大型的机械设备, 翻转的机械设备为不可或缺的一部分。目前的机械手, 一般采用第三方零件或仪器检测来实现原点定位, 操作不方便, 也提高了工作成本。

2 翻转装卸用机械手臂的结构设计与实现
针对现有技术的不足, 本设计的目的在于提供一种主要用于较重、表面容易破损的物品的搬运和传递的翻转装卸用机械手臂。
1.1 结构设计 (见图1)
结构主体主要包括机械臂与底板1, 其中所述底板1 下四角上分别设有底座19, 底板1 上设有定位台2, 定位台2 上设有下机械臂3, 下机械臂3 上设有定位盘4, 下机械臂3 后设有转动推轴14, 转动推轴14 后设有推管15, 推管15 内设有推动液压缸18, 推管15 后设有固定座17, 固定座17 上方设有限位杆16, 下机械臂3 的末端设有连接臂12, 连接臂12 下端设有转轴座13, 转轴座13 固定在底板1 上, 连接臂12 上端设有锁止液压缸11, 连接臂12 上设有电机10, 电机10 上方设有上机械臂6, 电机10 的转轴固定在上机械臂6 内, 电机10 的主体上设有转轮9, 上机械臂6 的首端上方设有伸缩液压缸7, 上机械臂6 的首端下方设有定位柱。所述底座19 中间设有通孔21, 底座19 的外侧面上设有固定盖20.所述转轮9 与所述上机械臂6侧面上均设有锁紧座8, 所述锁紧液压缸的活塞杆穿过所述锁紧座8.所述上机械臂6 的末端设有弹片, 弹片位于转轮9 的外侧。所述定位柱位于所述定位盘4 的正上方。
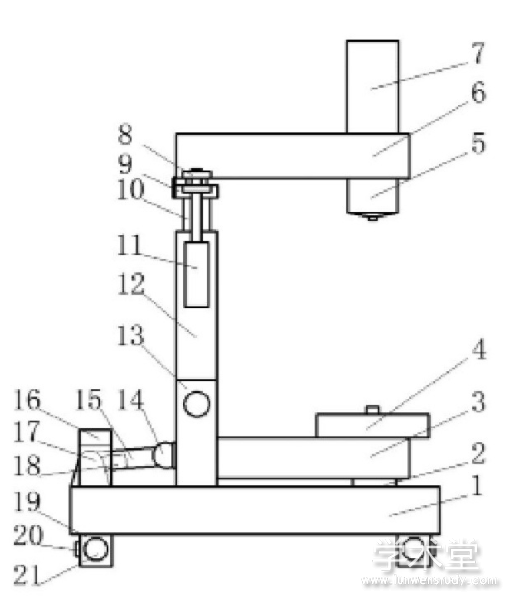
图1 翻转装卸用机械手臂的结构示意图
1 底板;2 定位台;3 下机械臂;4 定位盘;5 定位管;6 上机械臂;7 伸缩液压缸;8 锁紧座;9 转轮;10 电机;11 锁止液压缸;12, 连接臂;13 转轴座;14 转动推轴;15 推管;16 限位杆;17 固定座;18 推动液压缸;19 底座;20 固定盖;21 通孔
2.1 动作实现
本机械手臂固定在大型机械上或固定在底面上, 翻转时, 电机10 带动上机械臂6 转动, 再将物品置于定位盘4 上, 上机械臂6 转回原位, 锁止液压缸11 穿过锁紧座8 锁定, 伸缩液压缸7 推动定位管5 向下定位住物品, 然后推动液压缸18 推动机械臂从而导致机械臂转动直达限位杆16 处, 翻转后, 机械臂回原点。
基于上述, 本机械手臂可作为大型机器的一部分, 主要由上机械臂6 与下机械臂3 组成, 其中下机械臂3 用于物品的定位与固定, 而上机械臂6 则用于物品的紧固以及再定位。本机械手臂下的底座19 可以用于支撑本机械手臂, 并且可以连接本机械臂与大型机械的本体, 而底板1 与下机械臂3 之间的定位台2 则用于定位下机械臂3, 下机械臂3 上的定位盘4 用于定位物品本身, 下机械臂3 后的推管15 与推动液压缸18 则用于推动机械臂本身, 而转轴座13 限制了机械臂的前后移动, 故在推动液压缸18 的作用下, 机械臂会绕着转轴座13 转动, 而限位杆16 可以防止机械臂转动过度, 使得物品及机械臂转动90 度即可。下机械臂3 末端的连接臂12 用于连接下机械臂3 与上机械臂6 二者, 连接臂12 上方的电机10 可以控制上机械臂6 的转动, 而电机10 外的转轮9 与上机械臂6 上均设有锁紧座8, 锁紧座8 下方的锁止液压缸11 可以在上机械臂6 停止转动的时候将活塞杆穿过锁紧座8, 以防止上机械臂6 在水平方向上的转动。且在上机械臂6 的首端设有的伸缩液压缸7 可以推动其下的定位管5 向下将物品固定。底座中间设有通孔, 底座的外侧面上设有固定盖。转轮与所述上机械臂侧面上均设有锁紧座, 所述锁紧液压缸的活塞杆穿过所述锁紧座。上机械臂的末端设有弹片, 弹片位于转轮的外侧。定位柱位于所述定位盘的正上方。
本机械手臂下的底座可以用于支撑本机械手臂, 并且可以连接本机械臂与大型机械的本体, 而底板与下机械臂之间的定位台则用于定位下机械臂, 下机械臂上的定位盘用于定位物品本身, 下机械臂后的推管与推动液压缸则用于推动机械臂本身, 而转轴座限制了机械臂的前后移动, 故在推动液压缸的作用下, 机械臂会绕着转轴座转动, 而限位杆可以防止机械臂转动过度, 使得物品及机械臂转动90 度即可。下机械臂末端的连接臂用于连接下机械臂与上机械臂二者, 连接臂上方的电机可以控制上机械臂的转动, 而电机外的转轮与上机械臂上均设有锁紧座, 锁紧座下方的锁止液压缸可以在上机械臂停止转动的时候将活塞杆穿过锁紧座, 以防止上机械臂在水平方向上的转动。且在上机械臂的首端设有的伸缩液压缸可以推动其下的定位管向下将物品固定。
3 结语
本设计主要由上机械臂与下机械臂组成, 其中下机械臂用于物品的定位与固定, 而上机械臂则用于物品的紧固以及再定位。应用翻转装卸用机械手臂, 不仅能够高效、节能的对重物进行装卸, 而且设备投资少, 被装卸货物完整性好。该研究所得的方法和设备, 为装卸机械开拓了新思路、新途径。
参考文献
[1]贾伟涛。单片机控制机械手臂的设计与制作[J].电子制作, 2006 (05) .
[2]孙盛骐, 李琳, 顾树生。基于改进蚁群算法的伺服机械手臂路径规划[J].机械设计与制造, 2008 (07) .





