摘 要: 责任教育历来是世界各国共同关注的青少年重大教育问题, 同样也引起中美两国政府与广大民众的广泛关注。本文从青少年责任教育概念入手, 分析比较了中美青少年责任教育的目标、内容与实施方法, 通过比较分析得出我国青少年责任教育需要加强和改进之处。
关键词: 机械手; 航道维护; PLC;

1、 背景
长江发源于“世界屋脊”———青藏高原的唐古拉山脉各拉丹冬峰西南侧, 于崇明岛以东注入东海, 全长约6300公里, 是世界第三长河流。长江航线上标志船数量需求巨大, 如果标志船的布设、检查和维护得不到及时、可靠的保障, 将对航道整体的公共安全构成极大隐患。
目前, 航标维护仍然处在以人力为主的阶段, 与现代化、机械化、智能化的发展趋势有着一定的差距。其中, 人力工作量最大的主要有如下三方面:
1.1、 航标维护器材搬运。
维护航标时需要使用大量的航标维护器材, 其中锚石和钢丝绳重量一般达数百斤, 仅依靠人力搬运必须多人配合, 跨船转运危险性极高。
1.2、 日常移标设标。
我局绞锚时均可使用绞盘进行作业, 但抛设锚石时只能由船员将锚石搬至船边, 再推入江中。抛设过程中, 人员必须于舷边作业, 落水危险性极高。且锚石抛投后, 钢丝绳会以极快的速度被带入水中, 船员遭受鞭打和绊脚带入水中的危险性极大。
1.3、 锚缆缠绕物清除。
每到汛期, 江面会出现大量成分复杂的漂浮物。漂浮物在水流作用下极易与标志船钢丝绳缠绕在一起, 不易清除, 对标志船造成很大威胁, 严重时可导致标志船移位甚至翻沉。一直以来, 长江沿线各航道处主要采用铁钩、镰刀、砍刀等传统工具清除缠绕的漂浮物, 这种清除方式, 不仅难度大、耗时长、效率低, 而且劳动强度大、无法保证航道工人的自身安全。
针对以上问题, 本文研究以多功能机械手进行辅助航道维护作业的解决办法及其控制系统设计。
2、 机械手与P LC控制
机械手具有抓力大、动作灵活、传动平稳、结构紧凑、安全可靠、可实现遥控操作及智能化监控等特点, 在多个领域得到迅速发展和成功应用。
基于漂浮缠绕物种类和性质的不确定性, 结构简单或功能、动作单一的装置无法应对漂浮缠绕物的多样性, 能够模仿手工作业的机械手, 可以灵活的抓取各种缠绕物。同时, 高自由度的机械手在搬运物资方面比普通起重机械更为优秀, 抓手抓取锚石或锚之后也可以很方便进行浮标定位。综上所述, 本文将机械手装置应用作为研制的总体思路。
PLC控制系统, Programmable?Logic?Controller, 可编程逻辑控制器, 一种数字运算操作的电子系统, 专为在工业环境应用而设计的。它采用一类可编程的存储器, 用于其内部存储程序, 执行逻辑运算, 顺序控制, 定时, 计数与算术操作等面向用户的指令, 并通过数字或模拟式输入/输出控制各种类型的机械或生产过程, 是机械手主流的控制系统。
3、 机械手动作分析
综合考虑以上因素, 机械手的设计方案采取三折臂加全回转型式, 采用电动液压系统进行驱动, 通过液压阀件实现过载保护和状态维持。
机械手的动作应包括整机全回转、变幅、折臂一、折臂二、抓手转动、抓手摆动、两瓣抓手开闭。
根据方案设计确定的机械手七个基本动作, 则机械手装置从原理上应包括装置基座、回转式液压马达及减速器、回转机座、基础臂、折臂一、折臂二、可开闭抓手、一只变幅油缸、两只折臂油缸、一只摆动油缸、一只抓手开闭油缸、抓手转动液压马达及减速器、液压泵站、电控箱、无线遥控器等组成。
4、 控制系统设计
经液压系统分析、计算和选型, 泵站电机选用Y112M—4—H (5.5k W) 电机作为泵站动力源。母船提供一路电制为3ph AC380V50Hz的电源至装置星三角启动控制箱。装置的机旁控制箱、电动机等用电设备均由启动控制箱供电。
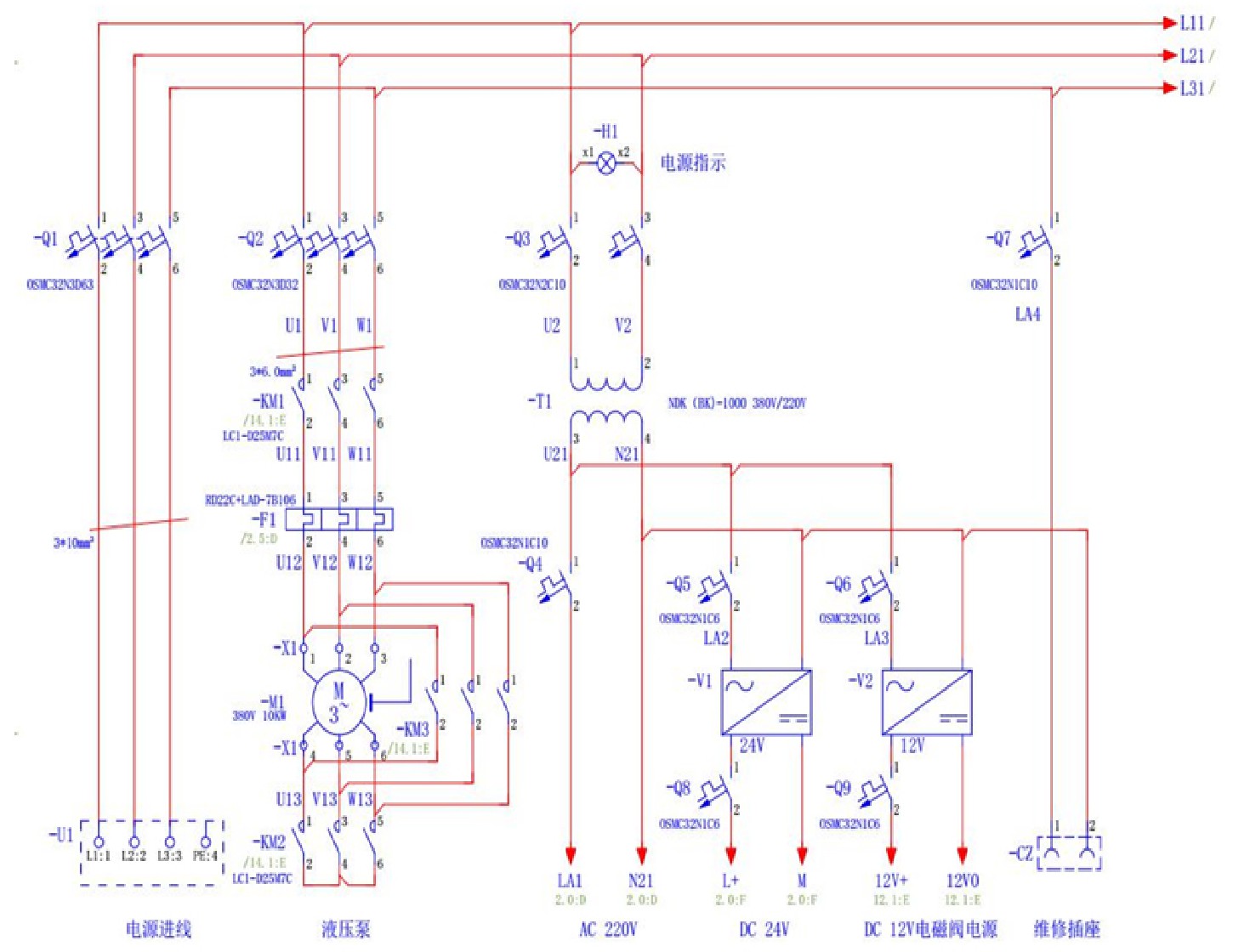
机械手所需要的七个动作, 分别由7个比例阀进行控制, 控制系统通过控制七个比例阀的开度来实现机械手装置的各种动作。
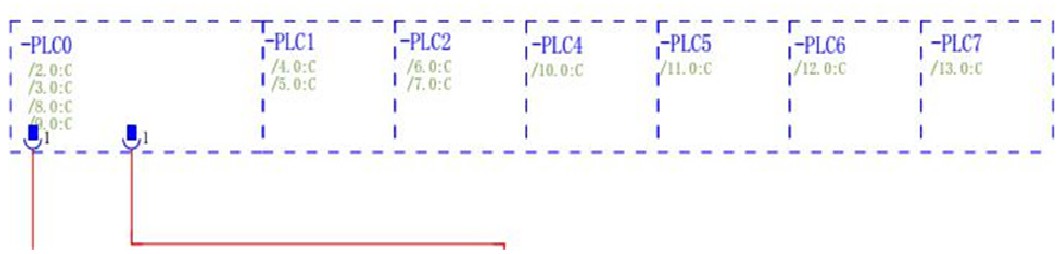
本系统所用的PLC模块一共有7个, 分别为一个主站CPU模块、两个扩展模块和四个模拟量模块。船舶倾角、油温油压亦通过模拟量模块进入系统。其中船舶倾角预警对保障船舶安全有着很重要的作用。PLC模块全部安放在机械手装置的机旁控制箱内, 控制箱采用IP56防护等级。控制箱内部还接入了一部信号发射/接受装置, 与一部遥控器相连接。遥控器作为系统的指令输入源, 其指令通过信号发射/接受装置接入各PLC模块。
PLC程序设计包括程序流程设计和用户程序编写两大部分。由于PLC采用循环扫描的工作方式运行程序, 本装置采用了顺序结构和选择结构相结合的方式设计程序流程。用户程序任务细分可得两大类任务:全局任务和过程任务。全局任务 (例如:数据处理、实时通讯等) , 在每次PLC程序扫描时都要执行, 因此应将这类任务采用顺序结构串入程序流程中。过程任务 (例如PID控制、过程控制、故障诊断等) , 只需在特定过程中执行, 应采用选择结构并入程序流程中, 根据系统执行进程, 选择相应的任务执行。
5、 P LC系统抗干扰措施
在PLC控制系统设计过程中抗干扰是一个关键问题, 其关系到系统运行的可靠性。现结合实际经验介绍几点抗干扰措施。
5.1、 采用屏蔽电缆线传输模拟信号并远离动力线。
采用屏蔽线可有效避免辐射电磁干扰, 由于动力线周围具有较强的电磁辐射, 信号线应避免靠近动力线, 在实际敷设电缆时, 动力线与控制线应从有一定间距的地沟中分别走线。
5.2、 软硬件滤波。
应选用具有较好的硬件滤波电路的PLC接口模块, 此外软件上也可采用平均值法等算法对测量信号进行处理, 滤除干扰信号。
5.3、 良好的接地。
PLC控制系统应采用单点接地方式接地, 且不与动力电系统共地。
6、结论
PLC控制系统设计由控制对象分析、系统接口设计、通讯系统设计、系统组态、PLC程序设计与调试等部分组成。选择适当的编程语言编写程序, 灵活运用各种调试方法进行程序调试, 同时采用合理的抗干扰措施提高系统的抗干扰能力就能设计出性能优良的PLC控制系统。在多功能机械手的应用中, 表现出运行可靠、易扩展、维护方便、抗干扰能力强等特点。
多功能机械手装置的研发, 是航道维护装备和作业方式的创新, 更是长江航道和航运事业发展新的里程碑。装置的研制成功, 使标志船钢丝绳缠绕物的清除能力得到了根本性的改变, 减轻了作业劳动强度, 提高了作业方式的安全性、可靠性和工作效率, 是现代科技成果在航道维护中的具体应用, 实现了显着的社会效益。
参考文献:
[1]周万珍, 高鸿斌 (第一版) .PLC分析与设计应用[M].北京:北京机械工业出版社, 2004:32
[2]李道霖.电气控制与PLC原理及应用[M].北京:电子工业出版社, 2004.





