摘 要: 技术的进步使得人类拥有了更多的信息获取途径,这不但丰富了我们的生活,也提高了我们对客观世界的认识水平。集成成像是一种简单而有效的三维显示方式,被誉为最有前景的三维显示技术之一,在医疗、娱乐、设计、教育等方面均有着广泛应用。文章从光场的角度出发,分析并阐述了集成成像与光场原理的联系。
关键词: 光场; 三维显示; 集成成像;
与文字信息相比大脑对图像信息的处理过程更简单,处理速度更快,因此,人类在视觉和图的认知方面具有得天独厚的优势[1]。显示技术的不断进步为极大地丰富了人类的生活,利用手机、电脑等设备观看视频、图片、文字是现阶段人们重要的信息获取途径,传统的显示设备只能显示二维(2D)平面图像,缺少了第三维的深度信息,极大地限制了我们对真实信息的认识接收、认识和理解。
人眼能够观察到三维物体,主要有来源于物体本身的深度信息和人脑处理产生的三维感知。在物理深度信息上,主要因为双目观察到的内容略有差异,进而人眼肌肉和聚焦等发生变化,以及相对运动造成的视差;在意识上的三维感知则是由于经验所获得的透视、遮挡、阴影、纹理细节等。科技的革新使得三维显示技术得到了蓬勃发展,不同形式的三维显示技术层出不穷,例如三维(3D)立体电影、VR、AR等伪三维显示技术已经大规模商业化应用,这类三维显示技术主要利用了人们左眼和右眼接收到的视觉图像细微的差异性,使得大脑将具有视差图像的信息进行融合而获得三维的立体感知;而诸如全息显示、体三维显示、集成成像等真三维显示技术也随着电子、光学、图像处理技术的不断进步正在一步步进入市场,和伪三维显示技术先比,真三维显示技术不依托于人类的大脑处理,能够真实客观地恢复物体的光场信息,自提出以来就受到了广泛的关注,是未来发展的主要方向。在真三维显示技术中,集成成像光场显示技术,因其结构简单、易于实现、能够显示高质量的三维的立体图像的有点,获得了广泛而深入的研究被誉为最有前景的三维显示技术之一。

理想的三维光场显示能够准确重构出所记录物体的深度信息,观察者看到“浮现”的物体具有极强的真实感,集成成像是对原始物光场的重构,因此,其三维成像的核心原理与光场密不可分。
1、 光场基础
光场最早于1939年提出,Gershun在其一篇论文中给出了光场的概念[2],概括而言,光场就是光在空间介质中的分布情况,区别于先前的研究将重点关注于物体的发射和吸收方面,光场的概念加入了对传输介质的考虑,是从辐射能量传输角度进行的研究。在此之后,Adelson和Bergen对光场的概念进一步完善,并且提出了全光函数(Plenoptic Function)的概念[3],完整全光函数可以用七维函数表示:
其中,是空间点的坐标表示,是光线在空间点的传播方向,是光线的波长,t表示所研究的某一时刻。简单而言,全光函数描述了介质空间中,任意位置任意方向上某种波长光线的辐射度,这种形式的全光函数全面考虑了所研究光线的时间和空间特性。
如果不考虑光线随时间变化的影响,并且不特意区别不同波长光线在介质中的传播的变化情况,全光函数可以进一步降维为五维全光函数,即:
其中,是空间点的坐标表示,是光线在空间点的传播方向。这种方式的简化具有广泛的应用价值,因为在大多数实际的系统中,更为关注的是光线在系统中的传播特性。
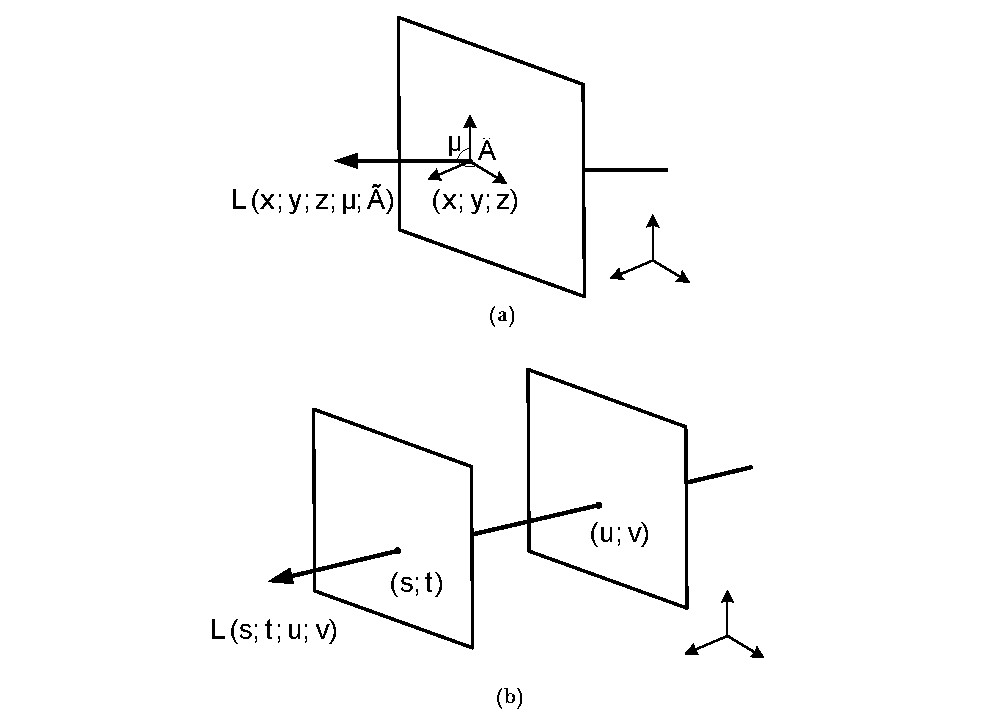
更为一般的情况下,光线在大部分的成像系统中都是在有限的范围内进行传播,为了更为突出光线的传播特性,利用光线在两个平面中的交点位置,可以将5维全光函数进一步降维到四维空间[4],即:
其中,和分别是光线与两个平面的交点坐标。需要说明的是,当降低到四维后,函数的形式大大简化,但是这种简化带来便利的同时也具有一定的局限性,此时的光场函数仅能够表达有限方向的光线,无法表示与这两个平面平行的那些光线。
幸运的是,在实际的应用环境中,系统的尺寸总是有限的,四维光场函数可以用来描述系统中光线的传播特性。具体到集成成像三维显示系统,由于实际条件下系统显示的视角不会超过180°,因此,是描述集成成像光场显示系统的有效工具。
图1 (a) 光场的五维表示示意图 (b) 光场的四维表示示意图
2、 光场与集成成像
人类对外部世界的感知和认识都高度依赖于视觉,视觉是人类感知世界的重要途径。人类之所以能够看到物体,是因为物体所发出的光线通过传播进入了人的眼睛,这些光线实际上是特定频段的电磁波,并且时时刻刻都在发生变化。为了在不同的时间和空间都能够重复看到那些物体,就必须通过一些途径将光场的信息记录并恢复出来,例如利用相机和显示器完成对光场记录和恢复。传统的拍摄和显示都是二维空间上对光场进行恢复,严重损失了光场的原有信息,然而集成成像则可以完成光场更高维信息的记录和恢复。
集成成像的概念是由法国物理学家Lippmann在1908年提出并首先实现[5],1911年,俄国科学家Sokolov通过针孔阵列进行立体空间拍摄实验也证明了该想法,1997年,日本的Okano等人利用数码设备进行拍摄和显示,取代了之前的感光底片,对传统的集成摄像系统进行了改良,将集成成像带进了数字时代[6]。
完整的集成成像包含采集和显示两个过程,在采集过程中,利用相机阵列或透镜阵列等设备,将一定范围内的光场信息以二维的方式记录到存储设备上,而在显示过程中,利用LCD或投影仪等设备配合透镜阵列,将二维化的光信息恢复为三维的光场,以使人们能够看到期望的立体场景。集成成像采集过程中,虽然在形式上依然是采用相机等传统成像系统,并且是将光场信息以二维的方式记录下来,但是在实质上已经发生了改变。
图2 (a) 传统相机光场采集示意图(b) 集成成像光场采集示意图
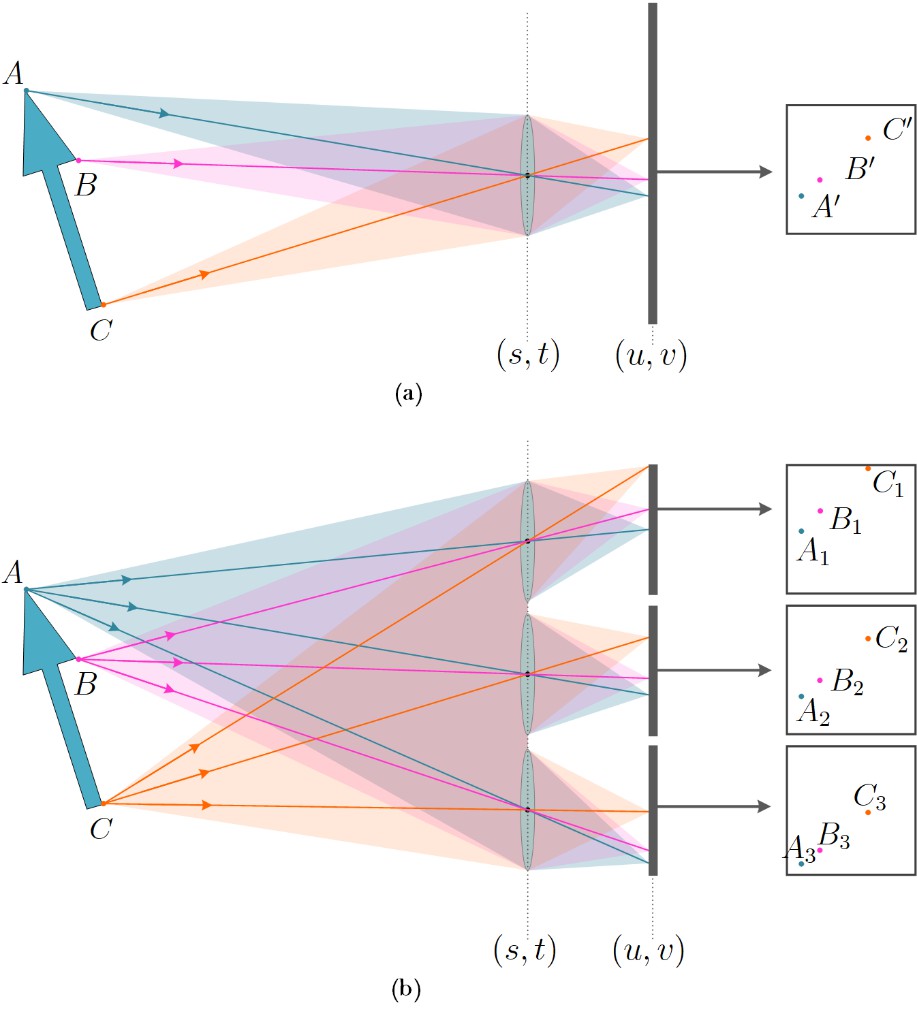
传统相机对光场的采集过程如图2?(a)所示,物体上不同位置的三个点发出的光线在空间中朝各个方向传播,一部分光线经过透镜后被汇聚在感光器件的位置上,如果将透镜所在平面定义为平面,感光器件所在平面定义为平面,则在平面上,光场的信息被记录了下来,由于在平面仅有一个参考位置点(光心),此时被记录的光场对应于全光函数的表示形式上相当于,这种形式记录的信息无法完整表示整个光场,也即无法体现三点在空间中某一维度的关系。
集成成像对光场的采集如?图2(b)所示,A1点在三个记录单元中的位置分别为A1、A2和A3,仔细观察能够发现,A1在记录单元中的位置较为靠上,而A3的位置较为靠下,如果依然将透镜阵列所在平面定义为平面,感光器件所在平面定义为平面,则可以看出,这种成像点位置的相对变化是由透镜阵列中单元透镜的位置变化造成的,也就是在光线平面的信息变化造成的,最终的光场信息依然是在平面被记录下来,显然,集成成像的光场采集过程比传统方式的光场采集多了平面的信息,此时被记录的光场对应于全光函数的表示形式上相当于,因此,所记录的光场也更为完善,能够反应出三点在空间中的三维位置关系。
真实空间中的光线是连续分布的,对应于理论分析,应该为连续函数,这也就意味着平面和平面上的点连续分布。显然,在工程实践中,无论是对应于平面上的透镜密度,还是对应于平面上的像素密度,都无法达到绝对的连续,这就决定了实际情况下的集成成像采集过程是对连续光场的一种离散采样,有:
对应于实际情况,就是将采样获得的信息记录在一个个像素中:
其中,为采集相机序号,包含了光线在平面的位置信息,为像素序号,包含了光线在平面的位置信息,为像素的数值,包含了光线的强度和频率信息。
光场相机的设计和实现就是利用了这种原理,美国的Ng设计出了手持式便携光场相机[7](被称之为Plenoptic Camera 1.0),并在其博士论文中利用光场的概念详细分析了其原理和性能,随后,Adobe公司的Georgiev等人设计了一种新的光场相机[8](Plenoptic Camera 2.0)并在随后的研究中不断改进其成像性能,相比于传统相机,光场相机能够实现快速拍摄和数字重聚焦。集成成像的采集系统也具有着与之类似的结构,无论是光场相机还是集成成像采集系统,都是将三维的光场信息二维化处理。然而,即便不考虑真实环境中各种误差,采集所得到的光场信息也会受到奈奎斯特采样定理的限制[9],因此,严格意义上集成成像采集过程获得的光场信息并不完整,无法保留超过一定频率的光场细节。幸运的是,人类对光线的感知能力也是有限,当相邻物点的距离小于一定间距时,人眼无法观察出彼此差异,因此,实际集成成像采集过程得到的离散光场信息也能够满足人眼的视觉需求。
采集得到的光场信息以某种方式保存在存储设备中,这些信息只有重新以光线的形式展现在人们面前才能够被正确看到并获得有效的三维感知,集成成像显示系统就是将这些存储设备中的数据恢复为人眼看见的光场。按照光线可逆的原理,显示过程可以看作是采集过程的逆过程,将记录的二维信息排列在平面,则为了能够正确恢复所记录的光场,就需要将透镜阵列等放置在平面,并保证平面和平面具有恰当的相对关系,如图3所示。
图3 集成成像光场显示示意图
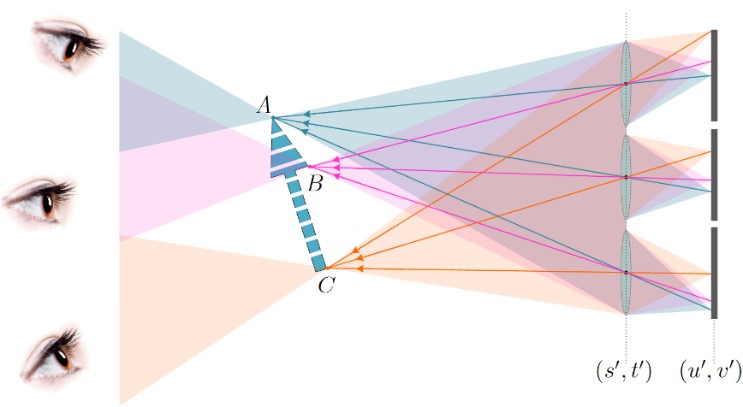
在显示过程中,平面的二维离散数据通过平面的透镜阵列后,被再次赋予三维信息,而透镜阵列在赋予光线方向信息的同时,也对光线起到了滤波平滑的作用,因此,离散的光场变得平滑可视。从信号频率的角度,集成成像光场的显示的过程也会受到奈奎斯特采样定理的限制,对应于工程实践,无论是光场的显示过程还是采集过程,透镜的排布越密集,感光器件的分辨率越高,恢复的光场就越准确,人们看到三维场景也越真实。
3 、结语
集成成像是光场技术的一种重要的运用途径,通过离散的透镜或者针孔阵列,采集系统将三维连续的光场信息采样量化,以二维的离散数据形式保存起来,显示系统将离散的二维数据进行处理,恢复出原始物体的光场特性,使得观察者能够在不同位置接收到原始物体的对应光场信息,从而使观众获得三维感知,仿佛身临其境、触手可及。
参考文献
[1]李光达.基于认知科学的煤矿安全可视化管理效应研究[D].北京:中国矿业大学(北京),2017.
[2] GERSHUN A. The Light Field[J]. Stud Appl Math,1939, 18(1-4):51-151.
[3] ADELSON E H, BERGEN J R. The plenoptic function and the elements of early vision[M].Vision and Modeling Group, Media Laboratory, Massachusetts Institute of Technology, 1991.
[4]LEVOY M. Light fields and computational imaging[J].IEEE Computer, 2006, 39(8):46-55.
[5] GABRIEL L. La photographie intégrale[J]. ComptesRendus, Académie des Sciences, 1908, 146(446-551).
[6]OKANO F, HOSHINO H, ARAI J, et al. Real-time pickup method for a three-dimensional image based on integral photography[J]. Appl Opt, 1997, 36(7):1598-1603.
[7] NG R, LEVOY M, BRéDIF M, et al. Light Field Photography with a Hand-held Plenoptic Camera[D].Stanford University, 2005.
[8] LUMSDAINE A, GEORGIEV T. Full resolution lightfield rendering[J]. Indiana University and Adobe Systems, Tech Rep, 2008, 91(92).
[9]HOSHINO H, OKANO F, ISONO H, et al. Analysis of resolution limitation of integral photography[J]. J Opt Soc Am A, 1998, 15(8):2059-2065.





