摘 要: 温度对半导体激光器的工作特性有很大的影响, 所以对于半导体激光器温度控制的精度、响应速度要求都比较高。虽然人们已经提出了很多控制方法, 并且在个别场合已有应用, 但是要实现精度、更快响应速度的控制还有很多需要解决。本文对近几年有关半导体激光器温度控制的方法, 及一些改进措施进行了简单的介绍, 以供从事半导体激光器温度控制研究的人员参考。
关键词: 温度控制; 半导体激光器; PID控制; 模糊控制;
一、引言
半导体激光器在各个领域的应用越来越广泛, 具有很好的应用前景。但是半导体激光器的阈值电流、输出功率和输出光波长都很容易受到温度的影响[1-2], 所以, 半导体激光器的使用一般都伴随着对其温度的控制。就目前诸文献显示表明, 对半导体激光器的温度控制一般使用的执行器件是半导体制冷器 (TEC) [3], 半导体制冷器是一种集制冷与制热于一体的电流驱动温度控制装置。对于半导体激光器的温度控制就是实现对TEC的精确控制。
二、 PID温度控制方法
半导体激光器温度控制使用最广泛的控制方法就是PID控制。PID控制是比例、积分、微分控制的简称。它是一种线性控制器, 根据给定值和实际输出值构成控制偏差, 将偏差按比例、积分和微分通过线性组合构成控制量, 对被控对象进行控制。其数学模型可由下式表示[4]:
控制系统结构如图1[5]:
图1 PID控制结构图
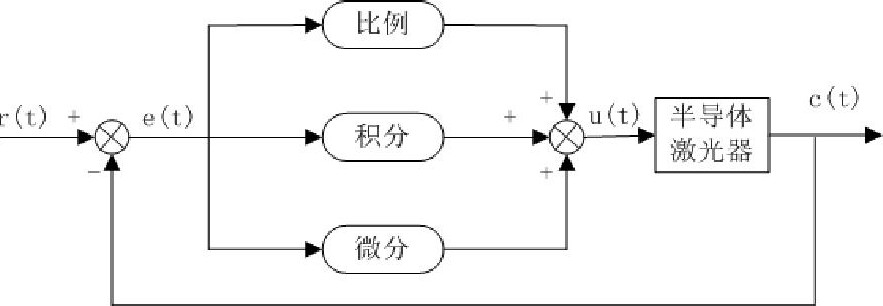
文献[6]中选用ADI公司的TEC专用控制器ADN8830和TI公司生产的32位定点DSP芯片TMS320F2812分别做为主控芯片, 来实现对半导体激光器PID温度控制, 并进行了对比。两种温度控制方法的精度都可达到±0.125℃, 但基于TMS320F2812的温控方法达到稳定需要的响应时间是180S, 而基于ADN8830的控制方法80S就能达到平衡状态, 并且该方法体积小、功耗低。
文献[7]中选用单片机PIC16F877A作为主控芯片, 实现PID控制, 在-40-55℃宽范围内半导体泵浦头温度控制精度可达±0.2℃, 系统达到稳定的响应时间为2min, 并且通过三年的野外使用表明系统稳定正常。
文献[8]中选用了Maxim公司推出的专用TEC驱动器芯片MAX1968作为主控芯片, 实现PID控制。该系统在环境温度为40℃, 设定温度为25℃时, 控制精度为±0.02℃。文献[9]中选用了Maxim公司推出另一款TEC专用驱动芯片MAX1978, 这款芯片是在MAX1968的基础上集成了TEC驱动电路, 控制精度可达到±0.005℃。
PID控制能很好的实现半导体激光器的温度控制, 有较高的控制精度和响应速度, 易于与PC机通讯, 可完成人机接口、实现较复杂的控制算法和数据处理, 因此, 这种控制方法广泛的被人们使用。
三、 模糊控制方法
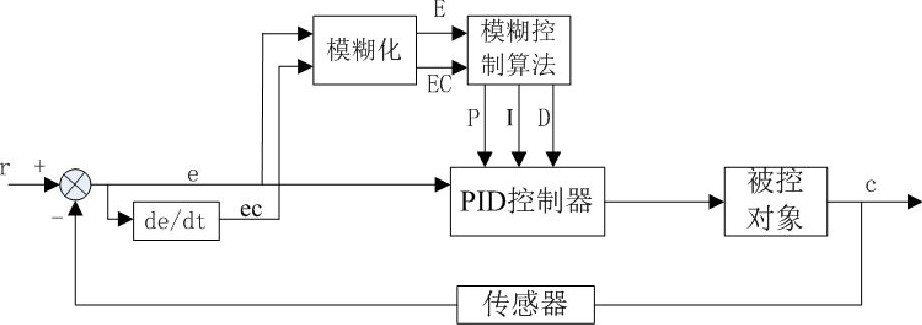
模糊控制器中, 大多数是选取偏差值e以及它的偏差变化率de/dt作为模糊控制器的输入变量, 而把控制量u作为模糊控制器的输出变量, 因此, 它是一个二维模糊控制器, 其结构如图2:
图2 模糊控制结构图

这样就确定了模糊控制器的基本结构, 由图2可知, 经采样获得的输入量与期望得到的输出量, 由此得到偏差信号e和偏差变化率de/dt, 这两种信号是准确量, 它们作为两个输入信号送入模糊控制器, 经过模糊化, 两个输入信号变成模糊量集合E和EC, 再根据专家经验建立的模糊规则求出模糊关系, 然后, 再由模糊关系依据输入给出相应的输出U, 这就是推理合成。最后, 再模糊判决得到精确的控制量[10]。
模糊控制技术应用于家电产品已是很普遍的现象, 但半导体激光器的温度控制使用这种方法还很少见, 目前的文献中没有发现做出实物系统的, 大多都是基于simulink进行的仿真。文献[11]中对这种控制方法使用simulink进行了仿真, 单纯的模糊控制与控制目标没有超调, 达到稳态的时间较短, 响应时间大约为4s, 稳态误差大约为1.5%。文献[12]中同样对这种控制方法进行了仿真, 结论同样是没有超调, 响应时间3s, 稳态误差大约为1.5%。
模糊控制不存在PID方法存在的积分饱和现象。实验调节过程表明, 模糊控制较PID控制不仅被控对象参数变化适应能力强, 具有更快的响应、更小的超调和很强的鲁棒性, 而且在对象模型发生较大改变的情况下, 也能获得较好的控制效果[13]。
四、 模糊PID控制
自适应模糊PID控制系统结构主要由参数可控式PID和模糊控制系统两部分组成, 其结构如图2所示。参数可控式PID完成对系统的控制, 模糊控制系统实现对PID的3个参数的自动校正[14]。
模糊PID控制共包括参数模糊化、模糊规则推理、参数解模糊、PID控制器等几个重要组成部分。计算机根据所设定的输入和反馈信号, 计算实际位置和理论位置的偏差e以及当前的偏差变化ec, 并根据模糊规则进行模糊推理, 最后对模糊参数进行解模糊, 输出PID控制器的比例、积分、微分系数。结构如图:
图3 模糊PID控制结构图
文献[15]对模糊PID控制进行了仿真, 与PID控制进行了对比, 相对与PID控制, 模糊PID控制具有更小的超调量、更快的响应速度。并且使用MSP430F149作为主控芯片实现了对半导体激光器温度的模糊PID控制, 控制精度达到了±0.02℃, 最大超调量0.5%, 响应时间15s左右。
文献[16]中使用TMS320F2812芯片作为主控芯片实现了对半导体激光器温度的模糊PID控制, 设置温度为25℃时控制精度可达±0.1℃, 系统的响应时间为100s, 超调量不大于0.5℃。很好的实现了对半导体激光器温度的控制。
五、 基于自抗扰控制器 (ADRC) 的控制方法
自抗扰控制器 (ADRC) 采取了PID误差反馈控制的核心理念。自抗扰控制器主要由三部分组成:跟踪微分器 (tracking differentiator) , 扩展状态观测器 (extended state observer) 和非线性状态误差反馈控制律 (nonlinear state error feedback law) 。自抗扰控制器 (ADRC) 作为一种非线性控制, 能实时估计出对象模型摄动和不确定外扰, 并采用特殊的非线性反馈结构予以自动补偿, 是“不变性原理”和“内模原理”的进一步发展, 具有实用性强, 精度高, 鲁棒性强等特点, 能较好地解决非线性系统的控制问题[17]。
自抗扰控制器很少被用于半导体激光器的温度控制, 文献[18]将这种控制方法用于半导体激光器的温度控制进行了仿真, 并且与PID控制进行了对比。相对于PID控制, 这种控制方法没有超调量, 稳态误差小, 但是响应速度慢, 响应时间长。
六、 分段控制模式
文献[19]中提到了一种新的控制方法, 来实现半导体激光器的温度控制。该文献中使用分段控制的模式, 将全部控制空间划分为三个部分, 分别是极限控制区域、比例控制区域和自适应控制区域。在自适应过程中采用二级计数器自行调整控制参数, 从而大大提高了控制精度。这种控制模式不需要对控制对象及外界环境建立复杂的数学模型, 使设计难度大大降低, 控制精度大大提高, 使设计的可移植性得到改善。控制精度可达±0.1℃, 超调量小, 响应速度快。
七、 总结
从目前相关研究人员设计的半导体激光器的温度控制系统来看, 对于半导体激光器的温度控制已经达到很高的控制精度和很快的响应速度, 但是随着技术的发展, 对于控制要求越来越高, 半导体激光器温度控制仍有研究的必要, 以满足新环境下的技术要求。
参考文献:
[1]G.H.Thomson.Temperature dependence of threshold current in (Gah) (As P) DH laser at 1.3 and 1.5μm wavelength.EE Proc.1981, 128 (02) :37-43.
[2]薛力芳.高频调制窄线宽光纤激光器的研制[博士后][D].北京, 中国科学院研究生院, 2010.
[3]周真, 齐忠亮, 秦勇.小功率半导体激光器的驱动方法设计[J].红外与激光工程, 2012, 41 (10) :2689-2693.、
[4]Antonio Visioli.Practical PID Control[M].London SprnigerVerlag, 2006:1-18.
[5]Bennett S.Development of the PID controllers[J].IEEE Control Systems Magazine, 1993, 13 (02) :58-66.
[6]张艳娜, 郑小兵, 李新, 刘恩超.陷阱探测器温控装置的设计[J].大气与环境光学学报, 2013, 8 (01) :73-80.
[7]李栋, 李曼, 耿宏伟.高性能半导体激光器温度控制单元的设计[J].航空精密制造技术, 2012, 48 (04) :45-48, 34.
[8]徐建, 甘志银, 石雄, 刘胜.CPT原子钟系统光源温度控制设计与实现[J].宇航计测技术, 2011, 31 (02) :18-21, 26.
[9]任泉泉.基于半导体制冷器的激光器温度控制系统设计[D].山东大学, 2012.
[10]张乃尧, 阎平凡.神经网络域模糊控制[M].北京:清华大学出版社, 1998.
[11]张浩然, 田小建, 艾淑平.半导体激光器恒温控制单元模糊算法的实验仿真[J].吉林建筑工程学院学报, 2007, 24 (02) :78-80, 86.
[12]艾淑萍.半导体激光器恒温控制单元的控制模式与算法研究[D].东北师范大学, 2005.
[13]李士勇.模糊控制神经控制和智能控制论[M].哈尔滨:哈尔滨工业大学出版社, 1996.
[14]刘文慰, 葛锁良.AT89C2051在自适应模糊PID温度控制器中的应用[J].电子工程师, 2004, 30 (01) :20-22.
[15]王晛, 陈剑虹, 杨佳丽, 朱凌建.基于模糊PID控制的In Ga As光电探测器的温控系统[J].计算机测量与控制, 2012, 20 (06) :1518-1520, 1526.
[16]邹文栋, 叶钦, 谢海鹤, 赵立忠.基于TMS320F2812的半导体激光器温度控制[J].红外与激光控制, 2008, 37 (04) :642-646.
[17]韩京清.自抗扰控制技术[M].北京:国防工业出版社, 2008:243-286.
[18]严索, 李顶根, 于召亮.基于ADRC的半导体激光器温度控制的仿真研究[J].工业仪表与自动化装置, 2013 (01) :3-5, 45.、
[19]段玉生, 何峰, 徐建一, 刘文武.分段控制模式在半导体激光器温度控制中的应用研究[J].实验技术与管理, 2006, 23 (02):21-23, 34.





