����ժ Ҫ����Ϊ��̽�⡢�������о��߶�С������ʷ�̡������ص�������ǿ����������ά��ϸ����ֱ�ṹ���ݱ���ɣ������������������ձ�ƽԭ�����ʱ�շֱ��ʵ�˫ƫ���״���������Ϊ֧���ձ������״������裬�������״������ı�Ҫ�Գ������ص�����ձ������״��������ԡ��о�������(1)�ձ������״�������ô����ߡ�ȫ��̬�������ܼ���ָ���X����˫ƫ���״����������ò�ͬ�Ĺ۲�ģʽ���ɻ�ÿռ�һ���Ժá�ʱ�շֱ��ʸ��ҷḻ��̽�����ݣ�����������ǿ���������Ŀ��١���ϸ��̽��Ҫ���⣬���ýϸߵ������ظ�Ƶ�ʵ���չ���ٷ�Χ�����X�����״��ٶ�ģ�����⡣(2)�����ۼ�����Ƚϣ��ձ������״����ɲ������������������˽ṹ��ȡ�ۼƿռ��ܶ�ֵ90%���״���Ϊ60kmʱ������ֱ��bs����ֵΪ282.0m����Ͳ����߶�bh����ֵΪ52.6m��̽��������Zmin����ֵΪ2.7dB;X�����״�������S����ҵ���״���ȣ���60km̽����봦���䲨��ֱ����С��Լ2����0°����ä���߶Ƚ�����Լ1.5����̽�������Ƚ�����2.4dB�����ڷ�λ�ֱ��ʡ�̽��ä�������ز�̽�����������ݿռ�һ���Եȷ�����õ����������ṩ�������1km���������ĸ�ʱ�շֱ��ʵ��״����ϣ����ڲ�������ǿ����������(3)�ձ������״������ζ�����������ᡢ��Ӧ���˻���������������������һ���̶�ʽX����ȫ��̬˫ƫ������������״�ۺϿ������ձ�ƽԭ�״�ѡַ�ĸ������أ������״���������Ԫ����ý����������Σ�N=3,L=45��65km�������˽ṹ��5����ʱ�շֱ��ʵ�����̽���״����3�������������εĵ�Ԫ����Ƕ��S�����״�ҵ�����ڣ��γǡ�������̩���״��м䣩�������ɽ�һ�������״��������ؿ��۲����������ڸ��ʵ�������������������X���������״��C��������������״
�����ؼ��ʣ�������; �״�����; ��������; X����˫ƫ���״�;
����Abstract����In order to detect and analyze the three-dimensional fine structure and evolution law of severe convective weather such as tornado with a small scale,short life cycle and heavy disaster,Jiangsu is building a high-resolution dual polarization weather radar network in the North Jiangsu Plain,where tornadoes occur freguently.This paper focuses on the networking strategy of the tornado radar network in the northern Jiangsu to support the construction of the tornado radar network.The study shows:(1)The tornado radar network in the northern Jiangsu adopts the X-band weather radar (dual polarization)network with large antenna,all solid state and high performance,and high performance indexes,which can not only realize long-distance detection,but also obtain data products with a great deal of high spatial consistency and high spatial-temporal resolution data,to a large extent meeting the requirements of fast and fine detection for tornadoes and other severe convection weather.In addition,in order to overcome the problem of velocity ambiguity for X-band weather radar,a higher pulse repetition frequency can be used to expand the speed measurement range.(2)In the North Jiangsu tornado radar network,a triangle(N=3,L=60km)network topology is used for theoretical calculation.When the cumulative spatial density value is 90%,the performance indicators are:beam size bsis 282.0 m,the minimum beam height bhis 52.6 m,and the detection sensitivity Zminis 2.7dB.Compared with the single S-band operational radar,the beam size of X-band network radar in the northern Jiangsu has reduced by about 2times,the minimum beam height by about 1.5times,and the detection sensitivity by about 2.4dB.That is to say,the azimuth resolution,detection blind area,weak echo detection ability,and data spatial consistency have been greatly improved,which can provide more radar data with a high spatial resolution,less than 1km or even 100m,high weak echo detection capability,and high spatial consistency.All that is convenient for monitoring,forecasting,and early warning of severe convective weather such as tornadoes.(3)Five X-band all-solid-state dual polarization Doppler weather radar sets are respectively equipped in Yandu,Funing,Dafeng,Baoying,and Xinghua (tornado-prone areas),which forms the tornado radar network in the northern Jiangsu.Considering the various factors of radar location selection in the North Jiangsu Plain,the basic unit of the final network adopts the topology structure of approximate triangle(N=3,L=45-65km).The high spatial-temporal resolution tornado detection radar network is composed of three basic networking units,which is similar to a trapezoid structure,embedded in the S-band radar service network (equipped in Yancheng,Huai’an,Taizhou,respectively).In the future,the number of radar sets can further increase and the observation area can be widened.X-band weather radar or C-band phased array weather radar can be added in the tornado prone areas such as Gaoyou.
����Keyword����tornado; radar networking; networking strategy; X-band dual polarization weather radar;

��������
�������ձ������й������ĸ߷���[1]�����ڻƺ����ش������Ա������������Σ����ڽ��Ӻ���ˮ���ܲ����ݺύ�������������ҵ��Ƶ���ƽ̹�����м�����������[2]��2016��6��23���γǸ���������ʷ�����������¼�����������ߴ�EF4���������ж�ʱǿ��ˮ���ױ���������ǿ���ǿ����������������ɵ���99��������800�������ˣ�ֱ�Ӿ�����ʧ49��Ԫ[3,4,5,6]��
���������״���Ϊ����ң���豸��̽�⡢Ԥ����������������Ч�Ĺ��ߣ����˲�������Ŀ�����ǿ����Ϣ�⣬�����Ի�ȡ�״ᄊ���ٶ���Ϣ�����㷨��֧���¿�ʶ�����С�߶ȵ����������Ϻͷ�ɢ����[7,8,9,10,11]��Donaldson(1970�꣩[12]�״����ö����������״�̽����������е�“��������”��Ҳ����1963����Fujita[13]��������ڹ㷺ʹ�õ���������Mesocyclone����Brown��[14](1978�꣩����λ������Oklahoma��Norman�ǵĹ���ǿ�籩ʵ���ҵĶ����������״����ϣ�������һ�����ܰ����������̵ı��������߶ȸ�С�Ķ������״ᄊ���ٶȳ��������������DZ���Ϊ����ʽ����������Tornadic Vortex Signature,TVS����2009—2010�꣬��������չ�ĵ�2��������ת��Դ����[15](Verification of the Origins of Rotation in Tornadoes Experiment,VORTEX���У�����ɨ�賵�ض������״RapidScan Doppler on Wheels,RSDOW���۲��ʾ�������ڲ���ά��ϸ�ṹ����ָ���������Ĵ������ز�����Weak Echo Hole,WEH���Լ���Щ����ĸ�弰��״�ز���̬�����ȴ�������̬����[16]�������������������������ҹ���1999����������һ�������״China Next Generation Radar,CINRDA�����Ľ�����ҵ������Ϊ����ǿ�����ļ���Ԥ���ṩ������֧��[17,18,19,20,21,22,23]����С��[24]��֣����[25]���ⷼ��[26]���ܺ�[27]�ȶԷ����������ϵͳ�µ��������и�����������Ϊ���������������е�ǿ������Чλ�ܡ�̧������߶Ƚϵͺ�ǿ��ֱ���б价���У��״�ز�ͼ�Ͽ�̽���������������������TVS���������ĵߡ��籩���ĸ߶ȡ������������ǿ�ȶ�����ǿ�����������塣֣����[28]�ȶ�̨��ǰ�����������“̨ǰ����”��չ��ϵͳ�ķ������о�����Ϊ̨ǰ����ĸ��籩Ϊ�������壬���������ڶ�����Чλ�ܽϵ͡�ǿ�Ϳգ�0��1km���б价���У���CAPEǿ�ȵ����������������ĸ��籩��������������������籩���ƣ��״�ͼ����Ȼ������������TVS�����������[29]����ѧ��[30]���о��dz������������籩�������״�ز�ͼ�Ͽ�̽�TVS���籩�����Ѹ�ͷ�չ���ر��Ƿ籩����Ѹ�����ߣ��ɶ�����Ԥ����һ��ָʾ���á��ܺ���[6]����˫�������״ﷴ�ݼ����Խ��ո���һ��ǿ�����¼������г߶��о���֤ʵ�˹�״�ز�����������-��������ɵ��ж�ż��Vertical Vorticity Couplet����Ҳ������ż��Vortex Couplet������ָ������ż�������γɡ���չ�����ؾ�����Ҫ���á�
�����ź����ǣ����ڹ��������Ĺ۲⡢Ԥ��Ԥ�����о�������ʱ�շֱ��ʽϵ͵�ҵ���״����������侫ϸ����ά�ṹ��������2006�꣬����Ϊ�ֲ�NEXRDA(Next Generation Weather Radar���Ϳ�̽�ⲻ��ͶԴ����˶���Ϣ̽��IJ�������������CASA(Collaborative Adaptive Sensing of Atmosphere��ϵͳ[31]�����öಿX���������״���������Эͬ����Ӧ�۲⡣���ڣ�2013���������4��X�����״ﹹ�����绯�״�[32,33,34]��2018������ʽ�����״X���Σ�3�������У�[35]��չ������������۲⼼������Ŀ�ѧ̽��������Ȼ��ȱһ�Ÿ�ʱ�շֱ��ʵ���רΪ������С�߶�ǿ�����۲⡢Ԥ��Ԥ�����о�����Ƶ�ҵ���״�����2018���𣬽���ʡ����ְ����й������ͳһ���𣬽�ϡ�����ʡ������ҵ��չ“ʮ����”�滮��Ҫ�����ձ�ƽԭ�������轭��ʡ���Ҽ�������������״�����ּ�ڲ�������С�߶�����ϵͳ��ϸ����ά�ṹ�������ձ�����ǿ����Ԥ��Ԥ��ҵ�����ѧ�о������Ĵ������״������ı�Ҫ�Գ������ص�����ձ������״��������ԣ�ּ��֧���ձ������״������蹤����
����1 �������״������ı�Ҫ��
�����״��������Ƶ��ŷ�����һ������������ʷ����������������ǵĸ߹��ʷ��������������������Ԫ��ÿ��������ԪΪ���Ƿ�������һ���֣������û���������ˣ�ѡ��̽�����������书�ʵ͵�С�״��X���Σ�����ܼ����ص�����С���״������ֲ�Զ����̽��ĸ߹����״�ϵͳ��S���Σ���̽��ä�������㡣�ಿС�״��γɵ��ܼ��״���������ҵ���״����ڣ���ͨ������ӦЭͬ�۲����Ż�����Ŀ�����̽��Ͷಿ�״�ͬʱ��������ȡ����ʱ�շֱ����ҿռ�һ���ԽϺõ����ݲ�Ʒ��
������������绯�״���������������״�����ͬ���ҹ�ҵ�������״���ÿ���״�̶�ģʽɨ�衣Զ����̽��ʱ��ҵ���״��S���Σ����ڱ��β������Ժ͵�������Ӱ�죬����̽��������ӣ�����Զ���뷽λ�ֱ��ʡ��Ϳ�̽��ä�����Ӷ�����̽�����ݿռ�IJ�һ���ԣ��粨��ֱ����Beam Size,bs������Ͳ����߶ȣ�Minimum Beam Height,bh����̽�������ȣ�Detection Sensitivity,Zmin�����ܶ������������������ڽ��ز㣬�������������ǰ����ų�������籩�Ͳ������������1km���£��Ų�����[25]�����ҵ���״��S���Σ���Զ����̽�����һ���ľ����ԣ�ؽ��һ�Ÿ��ܵ������״����ṩ�������1km�Ŀ��١���ϸ�����ϣ�֧��������ǿ����������⡢Ԥ��Ԥ��ҵ��
����2 ���ձ������״���������
����2.1�� �ձ����������״�����ָ��
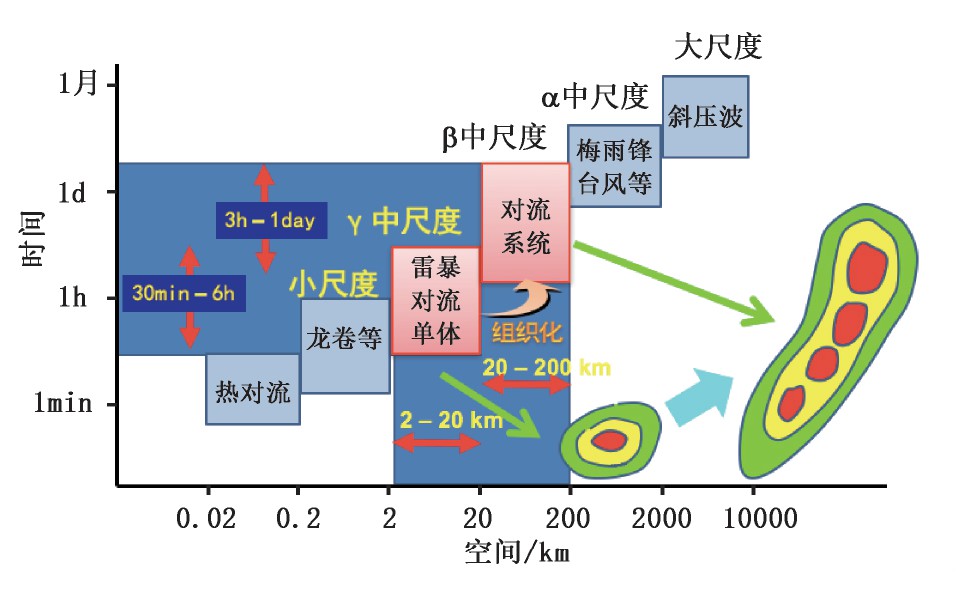
������ͼ1��֪��������ǿ����ϵͳ����С�߶�ϵͳ�������ȶ������ױ���������֮�䣬�ռ�߶�һ��Ϊ20m��2km�����ȶ�����������ʷΪ5min��1h����ĸ��籩Ϊβ�߶ȶ���ϵͳ��γ�߶��ױ��������壬�ռ�߶�Ϊ2��200km������ʷΪ30min��1d������S����ҵ���״��CINRDA/SA������ɨʱ��Լ6min���ռ�ֱ���Ϊ1km����ʱ��Ϳռ��Ͽ���������ĸ��籩��̽�⡣��ʵ��������С�߶�����ϵͳ�ڲ��ṹ���ٻ�����ϸ��̽�⣬�ͳɱ���խ��������ʱ�շֱ��ʡ�����ɨ��X���������״�����̽���Ϊһ�ֺܺõ�ѡ��
����ͼ1 ��ͬ�߶�������ʱ�շֱ���
������1Ϊ�ձ���������X�����״��S����ҵ���״���Ҫ̽������ָ��Աȱ�����֪��X�����״����������С����������ʵ���Լ����ô����ߣ�D=4.5m����ȫ��̬������ѹ����˫ƫ��������ʵ��ɨ�跽ʽ����䡢խ������ȡ������桢խ��������ʱ�շֱ��ʡ�̽���Ʒ�ḻ��ƫ����������ȶ��ɿ�������ָ�꣬������S���Σ���̽�ⷶΧ��Ϊ��“����”����S����ҵ���״���ȣ�Լ2.5����ࡣ����ֱ������Ͳ����߶ȡ�̽�������������DZ����״����ݲ�Ʒ�ռ�һ���Ե���Ҫָ�꣬��ֵ��̽��������Ӷ�������Զ����̽���S����ҵ���״���ԣ������ݲ�Ʒ�Ŀռ�һ����Ҳ����̽��������Ӷ���Զ����̽������ȴ��������ƣ���X�����״��ڸ÷����“����”��������ơ�����ձ������״������ô����ߡ�ȫ��̬��������ָ���X����˫ƫ���״��������ȿ�ʵ��Զ����̽�⣬�ֿɻ�ÿռ�һ���ԽϺá�ʱ�շֱ��ʸ��ҷḻ�����ݲ�Ʒ���ϴ�̶��������������ռ�߶ȣ����ȶ�������20 m��2km��ʱ��߶ȣ�5min��1h������С�߶�ϵͳ�Ŀ��١���ϸ̽�������⣬X�����״ﲨ���϶̣����ٷ�Χ���C�����״��S�����״��խ�����ǵ��״�ʵ�ʲ����Ǿ�����٣�ͬʱΪ���X�����״���ٷ�Χխ�����⣬���״����ʱ������̽����벻С��50km���ɲ��ýϸߵ������ظ�Ƶ�ʣ������3000Hz,5/4˫�ظ�Ƶ�ʣ�PRF�����в��ٷ�Χ����չ�����ٷ�Χ�ɴﵽ±96m/s���������������ٷ�Χ��Ҫ������ǿ����������ּ�������̽�������������Ϊ90m/s����
������1 �ձ����������״X���Σ���ҵ���״S���Σ���Ҫ����ָ��Աȱ�
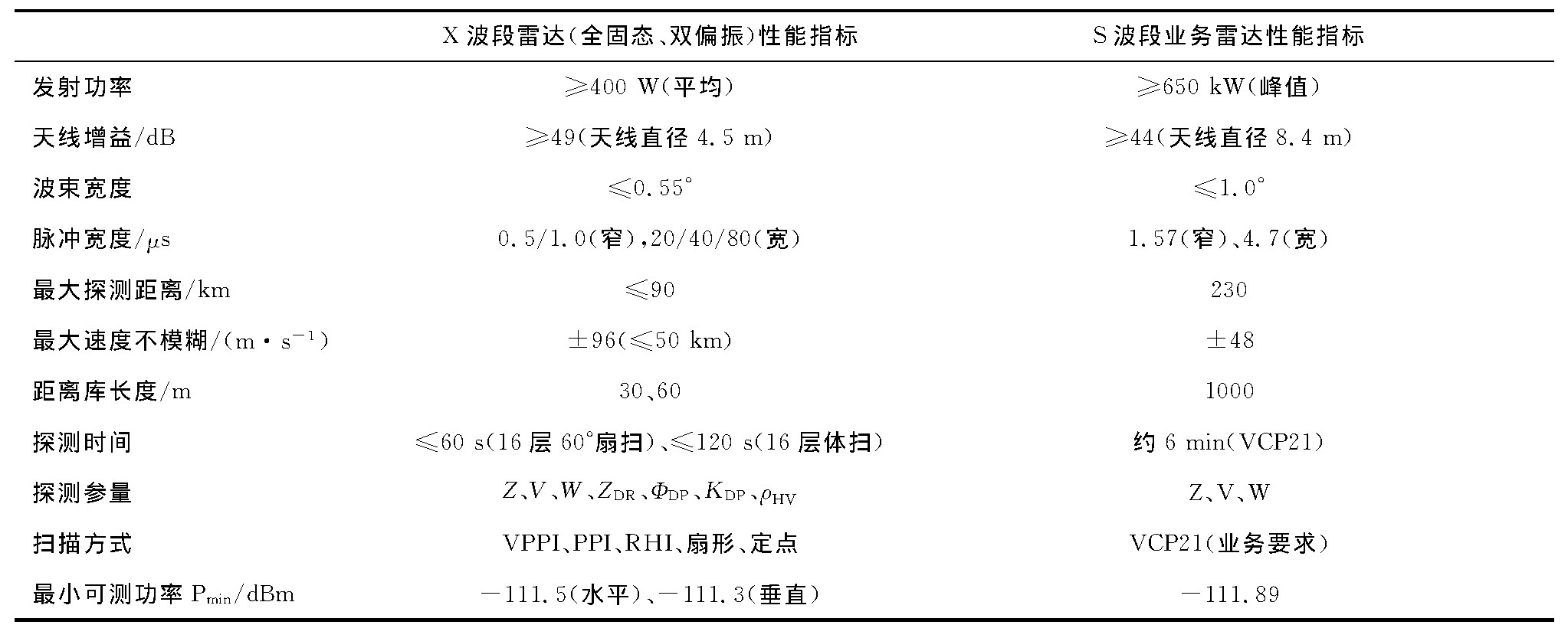
����ע��ZΪ���������ӡ�VΪ�����ٶȡ�WΪ����ZDRΪ��ַ����ʡ�ΦDPΪ�����λ��KDPΪ�����λ�ʡ�ρHVΪ��ƫ���������ϵ����
����2.2�� �ձ������״��������˽ṹ������
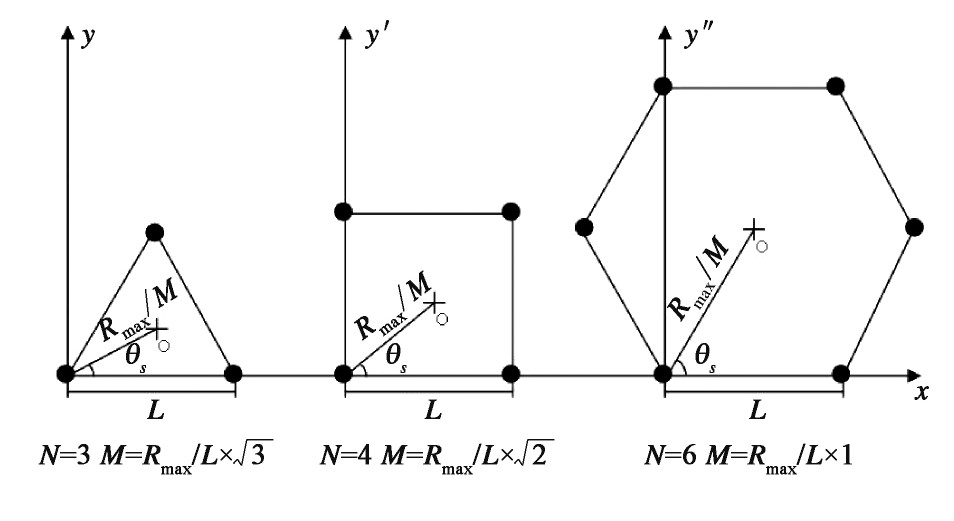
�����״�����һ������ͬ�������ͬ�Ļ�����Ԫ���ɣ������˽ṹ���������״����ڻ�����Ԫ������ͼ2�����״���������Ԫ�ļ���ģ�ͣ�����ͬ�ͺ��״������N(N=3,4,6ʱ���״���������Ԫ��Ϊ�ȱ������Ρ����ı��Ρ��������ͣ�������L�������״�֮����룩�������״����̽�����Rmax���ص���M���н�θs�Ȼ��������Լ��ص���M����ѧ���㹫ʽ����ͼ2��֪���״�����N��ʾ����N���ߵĹ������Σ��״�λ�ڶ��㣩�������������������Ԫ�ļ�����״��Ϊ������Ԫ����״���ӣ�ʮ�ֽ����o����Ϊ3�ּ���ģ�����Բ��Բ�ĵ㣬�õ㵽ÿ���״�ľ��루Rmax/M����ȡ����ĵ�o��ÿ���״�ľ���Rmax/M�ɳ�Ϊ����������Ԫ�Ŀռ䷶Χ���ص���M���ǵ����״����̽�ⷶΧ������������Ԫ�ռ䷶Χ�ı�ֵ�����ص���M=1ʱ����ʾ����������Ԫ�ռ䷶Χ���������״�̽�ⷶΧ�������״�̽�ⷶΧ�������쵽������Ԫ���ĵ�o�����ص���M<1ʱ����ʾ����������Ԫ�ռ䷶Χ���������״�̽�ⷶΧ������̽���϶���ص���M>1ʱ����ʾ����������Ԫ�ռ䷶ΧС�������״�̽�ⷶΧ�������״�̽�ⷶΧ����������Ԫ���ĵ�o������Mȡ∞ʱ�������״ﶼ�����ڻ�����Ԫ���ĵ㣬���ֹ��ȸ��ǡ������ص���M���㹫ʽ��֪���ص���M���ɵ����״����̽�����Rmax������L������ã�������������Ԫ�ռ串��������ɵ����״����̽�����Rmax����������L��ͬ��������ȷ�������������״��ͺź����״����̽�����RmaxΪ��ֵ������������L�������ص���M��ֵ���Ӷ���������������Ԫ�Ŀռ串��������ɳ���Ϊ�״���������Ԫ�ĸ��������ӡ�����״���������Ԫ��״�����״�����N������������������L��ͬ�������״��������˽ṹ���ԡ�
����ͼ2 �״���������Ԫ�ļ���ģ��
��������ֱ��bs����λ�ֱ��ʣ�����Ͳ����߶�bh��̽��ä������̽��������Zmin���߾���̽�����ĺ������ǵ����״�Զ����̽��ʱ��Ҫ����ָ�꣬������ֻ�漰�״�Ӳ�����ܣ��������Ŀɵ������źŴ������棨���������פ��ʱ��ȣ����ಿ�״ﹹ�ɵ��״���������ò���ֱ��bs����Ͳ����߶�bh��̽��������Zmin��Ϊ������ָ��ȽϹ��ߣ����������ĵ����״������Լ��ಿ�״ﹹ�ɵ��״��������ܣ����������˽ṹ���Ƚϡ�
��������Papoulis(1991)[36]������������μ�Ŀռ���μ0��μmax�����ɼ������ۼ��ܶȺ�����
����ʽ�У�fu��μ��Ϊ������μ�Ŀռ��ܶȺ�������ֵ�ڣ�0,1��֮�䡣
�����ٶ�μ=δ��δ≤μmax�����������μ0��δ���ۼƿռ��ܶȺ���ֵ����ֵΪС�ڵ���100%�İٷ�������������μȡ���ֵμmaxʱ��F��μmax)=100%��������˼ά����֪������μֵ�ķ�Χ�������ij�ض��ۼƿռ��ܶȺ���ֵ��Ӧ��δֵ����Ϊ������μ������ֵ���ο��������ף���F��μ��=90%������ʽ��1�����μ=?��?<μmax��������������Ϊ����μ�Ŀռ����ڣ�С�ڵ���?ռ�ȣ���Ȩ�أ��ϴ�Ҳ����˵���������μֵ������С�ڵ���?�ķ�Χ�ڣ�����?��С�ڵ���μmax��μ�Ŀռ�����ռ�ȣ���Ȩ�أ���С��ֻռ10%����ˣ�����ֵ?�ܱ���������μȫ�ռ���μ0��μmax���ķֲ����ԣ�����ͬ����������ͬ�ռ���Աȷ�������ͬ�������˽ṹ���״���������ָ�꣨�磺bs��bh��Zmin���ռ���ͬ�����÷����������״��������������У���3���״�����ָ�꣨bs��bh��Zmin���ֱ���Ϊ���������������ռ���Ļ����ϣ�����ʽ��1������ۼƿռ��ܶȺ���ֵ=90%�µIJ���ֱ��bs����ֵ����Ͳ����߶�bh����ֵ��̽��������Zmin����ֵ���ֱ��bs��bh��Zmin3���״�����ָ�귽���������ֵ����Ƚϣ��б�ͬ�������˽ṹ���״����ռ�̽��������̽�����ݵ�һ���Գ̶ȣ��Ӷ��������������ܡ�
����ʵ��Ӧ���У�ʽ��1����ʽ���Ϊ90%����ʽ�ұ��״�����ָ�꣨bs��bh��Zmin���Ŀռ��ܶȺ�������ռ������Francesc Junyent(2009)[37]�ȸ����Ĺ�ʽ���б�ʾ���Ӷ����������ָ�꣨bs��bh��Zmin����Ӧ������ֵ����ʽ���£�

����ʽ��2��4��Ϊ�״����״�����ָ�꣨bs��bh��Zmin�������ܶȺ�������ʽ�����Ӧ�Ŀռ������ص���M���н�θs�Ȳ�����ͼ2����
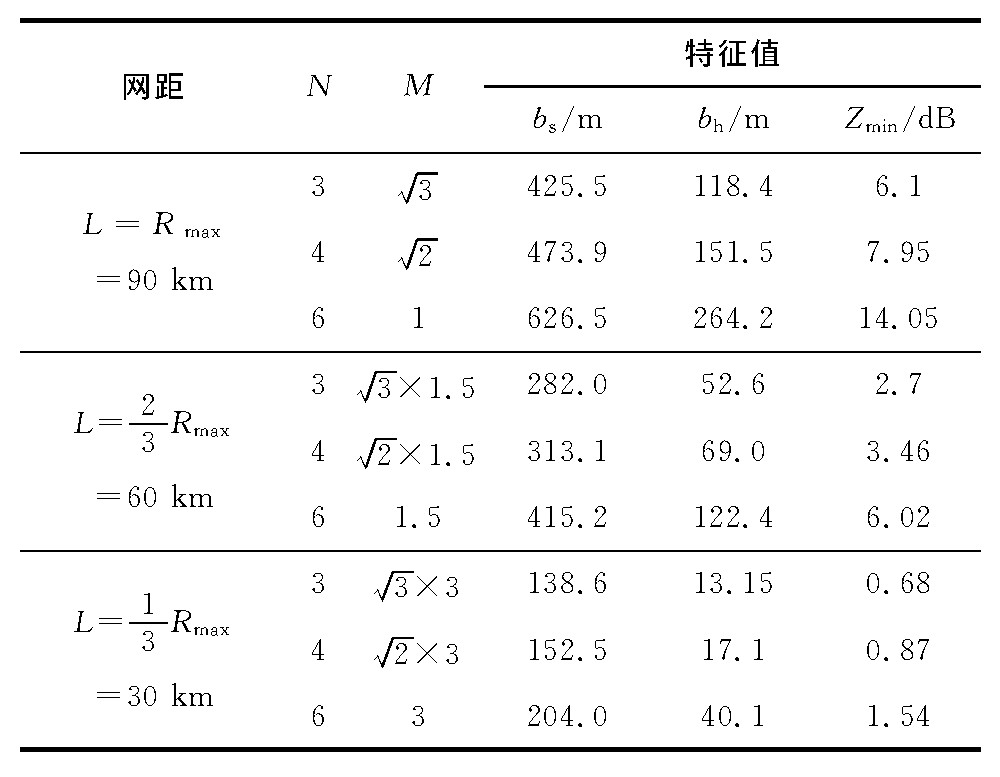
���������ձ������״������ĵ����״�����ָ�꣨��1���������ۼƿռ��ܶ�ֵΪ90%ʱ������������Ԫ����L�ֱ�Ϊ90km��60km��30km�����У�Rmax=90km��������ģ�ͷֱ�Ϊ�������Σ�N=3�������ı��Σ�N=4���������Σ�N=6�������˽ṹ�£����ݹ�ʽ��1������2������3������4������״�������ֱ��bs����λ�ֱ��ʣ�����ֵ����Ͳ����߶�bh��̽��ä��������ֵ��̽��������Zmin����ֵ����2�����ɱ�2��֪������������L��ͬʱ������ָ�꣨bs��bh��Zmin������ֵ��������״�����״�����N�����������N=3�������ǣ�ʱ���״�������ָ������ֵ��С����������L=90kmʱ������ֱ��bs����ֵΪ425.5m����Ͳ����߶�bh����ֵΪ118.4m��̽��������Zmin����ֵΪ6.1dB����������L=60kmʱ������ֱ��bs����ֵΪ282.0m����Ͳ����߶�bh����ֵΪ52.6m��̽��������Zmin����ֵΪ2.7dB����������L=30kmʱ������ֱ��bs����ֵΪ138.6 m����Ͳ����߶�bh����ֵΪ13.15 m��̽��������Zmin����ֵΪ0.68dB�����״�����N��ͬʱ������ָ�꣨bs��bh��Zmin������ֵ�����Ÿ�����������������L�������������������L=30kmʱ���״�������ָ������ֵ��С��Ȼ��������������LԽСԽ�á����ص���M�ļ��㹫ʽ��֪���ص���M����������L�ɷ��ȣ���С����������L����������ص���M��ʹ�״���������Ԫ���״�̽���ص����ȣ�����״���Դ���˷ѣ��������������Ч��ķ��ӡ���ˣ��ձ������״����������������Σ�N=3,L=60km�������˽ṹ�ȽϺ��ʣ����ۼƿռ��ܶ�ֵΪ90%ʱ���䲨��ֱ��bs����ֵΪ282.0m����Ͳ����߶�bh����ֵΪ52.6m��̽��������Zmin����ֵΪ2.7dB��
������2 ��ͬ�������˽ṹ���״�������ָ��Աȣ��ۼƿռ��ܶȺ���ֵΪ90%)
�����ձ������״�����������X����ȫ��̬˫ƫ������������״��S�����״���ȣ�60km������L=60km����������ֱ��bs�ֱ�Ϊ575.96m��1047.20m����С��Լ2����0°����ä���߶ȣ�bh+bs/2���ֱ�Ϊ499.91m��735.53m��������Լ1.5����̽��������Zmin�ֱ�Ϊ-4.65dB(80μs��ѹģʽ����-7.06dB��������2.4dB���״ﲨ��ֱ����Ӧ��λ�ֱ��ʣ���Ͳ����߶ȺͲ���ֱ����һ���Ӧ̽��ä����̽�������ȶ�Ӧ���ز�̽��������3������ָ�궼�������ֱ��йء��ӿռ�߶ȶ��ԣ�60km��575.96m�IJ���ֱ������ֵ���S�����״��ڷ�λ�ֱ������ϵõ�һ�����ƣ��ϴ�̶�������20m��20km�������ռ�߶ȣ�499.91m��0°����ä���߶����S�����״���̽��ä���ϵõ�һ�����ƣ����ṩ������ص���1km������100m���״����ݣ��������������������������������TVS���´�����չ�������ز�̽���������ԣ�-4.65dB̽�����������S�����״���̽�����ز�����������ڽ�С�IJ�ࡣ��̽�������ȹ�ʽ��֪���ڱ�֤���ջ�����С�ɲ�ʲ����Сʱ����ij�ض����봦����ͬ�����״�̽�������������״ﳣ��������һ�����S�����״��״ﳣ����С��X�����״Լ70dB���ң����IJ���̩���״�״ﳣ��Ϊ69.268dB�����ձ�����X���������״������ѹ������80μs��ѹģʽ���״ﳣ���ɼ�С��71.29dB��������ѹ��ģʽ��0.2μs���״ﳣ��Ϊ96.99dB������IP1�״X���Σ�����Ϊ85.6dB,IP3�״X���Σ�����Ϊ99.2dB������С����S����ҵ���״��࣬һ���̶�����������������ز�̽�����������⣬��ɢ��ԭ����֪��X�������S�����״С���ӷֱ���̽��������ǿ����������������̽�⣬���乴״�ز������ز����ľ�ϸ��̽�⡣ֵ��ע����ǣ�60km��X�����״�̽��ָ�����ڻ�ӽ���S�����״���������Эͬ�۲⣬���ڻ�ÿռ�һ���Ը��ߵ�̽�����ݣ����������������̵ķ�������ʶ����ˣ��ձ������״����X�����״��������ṩ������ص���1km���������ĸ߿ռ�ֱ��ʣ�����ͷ�λ�����Ϻõ����ز�̽���������߿ռ�һ���Ե��״����ϣ�����������ǿ���������ļ�⡢Ԥ��Ԥ����
����2.3 ���ձ������״�������
������3����1970-2006���ձ�ƽԭ��Ҫ����������ķ��������ÿ��ͳ��̨վ���г���10�����������ļ�¼����֪���γǺ��������Ĵ�����࣬�ֱ�ߴ�34�Ρ�26�Σ��˻�������֮���ֱ�Ϊ17�Ρ�16�Σ���Ӧ����Ϊ12�Ρ�10�Σ�����2016�긷�����ֵĺ��������¼�����������ߴ�EF4��������γǡ���������ᡢ��Ӧ�����ʡ��˻���Ϊ�ձ�����������
������3 �ձ���Ҫ����������ͳ�������1970—2006�꣩

����������Ҫ�����������ϵͳ��̨��ϵͳ���������£��ֱ��Ϊ�����������̨ǰ�����������ձ������������ȴ���ů�´���������ɵش������ļ�������������ȴ�����ϵͳ�Լ��ȴ���ѹ�Ĺ�ͬӰ�죬5-9��Ϊ�����ĸ߷���[38]���������ֵ��͵������������̨��ǰ�������������ж�ʱǿ��ˮ����������������������̡������ϵͳ�����£�ǿ��������·��Ӱ����¿ɷ�Ϊ2�֣�����ϵͳ�ؽ��������ƶ������б�̧���ػ��������ƶ���������ѹ��ǰ�߸��ʴ������Σ����߱�Ӧ�������������Σ�̨��ϵͳ�����£�ǿ�����Ĺ���·�����������֣�������ƫ����̨��ϵͳ���������Ϻ�—��ͨ���磩��½���������ƶ�����1810��̨��“����”����ᡢ�˻��������Σ���������������ƫ�ϣ�̨��ϵͳʡ�⣨�縣������½������½������ת��ʱ�еļ���Ϊ�ȴ�������ѹ�����ض��������ƶ����γǺ����Ƹ�֮���뺣���ձ�����λ���ȴ�������ѹ��̨�絹�ۣ��Ͳۺ��������ϴ�����1513��̨��“�յ���”��1614��̨��“Ī����”�����ʴ������Ρ����Ͽ�֪����������ᡢ��Ӧ�����ʡ��˻������������ձ�ƽԭ����ϵͳ���Ρ�
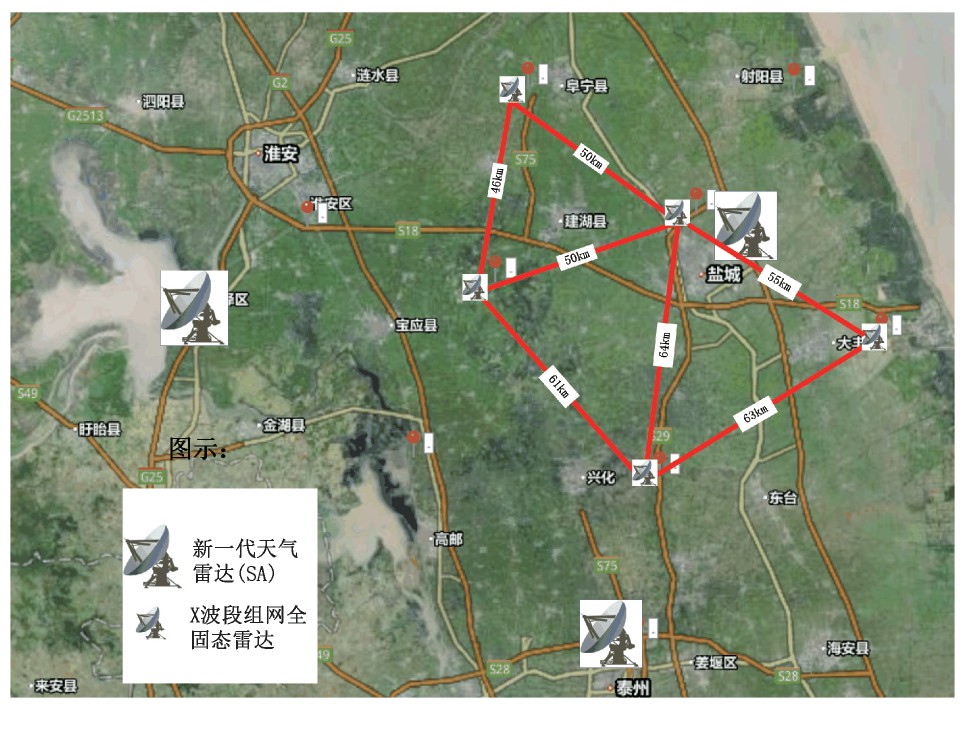
����ͼ3Ϊ�ձ������״�������ͼ����֪���ձ������״�������“�������”��ʽ�����ζ�����������ᣨ�γǣ������������ͱ�Ӧ���˻����ձ�ƽԭ����ϵͳ���μ�����������������һ���̶�ʽX����ȫ��̬˫ƫ������������״�ۺ����ձ�ƽԭ�״�ѡַ�ĸ������أ���������������Ԫ���ý����������Σ�N=3,L=45��65km�������˽ṹ����ʱ�շֱ��ʵ�����̽���״�����3������������Ԫ���ɣ��������νṹ����Ƕ��S�����״�ҵ�����ڣ��γǡ�������̩���״�����У�����վ�ͱ�Ӧվ֮������L=46km������վ���ζ�վ֮������L=50km����Ӧվ���ζ�վ֮������L=50km����Ӧվ���˻�վ֮������L=61km���ζ�վ���˻�վ֮������L=64km���ζ�վ�ʹ��վ֮������L=55km���˻�վ�ʹ��վ֮������L=63km��5��X����ȫ��̬˫��ƫ������������״ﹹ�ɵ��״���λ���γǡ�������̩��3��S����ҵ���״����У�������Ϳ�̽�ⲻ������750m̽��߶��ϣ�ͼ�ԣ����ձ�ƽԭ�������ڽϴ�ĸ���ä������Ҫ�DZ�Ӧ—����һ������������—�Ա�һ������ᶫ�Ϸ�����S�����״�ҵ����Эͬ�۲⣬ʵ���ձ�ƽԭ������棨0km����2km�߶ȵ���Ч̽�⡣Ȼ������λ���ձ�����ǿ����ϵͳ�����Σ����������������϶ࡢǿ�Ƚϴ��������أ���2013��7��7�ո��ʳ��ֵ�����[39]�����ڽ���ʡ���Ҽ������۲�Ԥ����������״������ڹ����н�һ������X�����״��������ؿ��۲ⷶΧ��������һ������˥Ӱ���С��̽�����ϴ��п���ɨ�������������״ﲼ���ڸ��ʵ�����“�縺”�����״�����ǿ�����ļ��ӡ�Ԥ����������C��������������״
����ͼ3 �ձ������״�������
����3 ������
��������Ϊ֧���ձ������״������蹤�����������״������ı�Ҫ�Գ������ص�����ձ������״��������ԣ������ó����½��ۣ�
����(1���ձ������״�������ô����ߡ�ȫ��̬�������ܼ���ָ���X����˫ƫ���״����������ò�ͬ�Ĺ۲�ģʽ���ɻ�ÿռ�һ���Ժá�ʱ�շֱ��ʸ��ҷḻ��̽�����ݣ�����������С�߶�ǿ���������Ŀ��١���ϸ��̽��Ҫ���⣬���ýϸߵ������ظ�Ƶ�ʣ��������ظ�Ƶ��3000Hz,5/4PRF���Ƚ��в��ٷ�Χ����չ�������ٷ�Χ�ɴ�±96m/s�����X�����״��ٶ�ģ�����⣬����̽���������Ҫ��
����(2���״��������˽ṹ���״�����N����״���ӣ�����������L�����������ӣ��������Ƚϲ�ͬ�������˽ṹ���״�������ʱ�������õ����״ﲨ��ֱ��bs����Ͳ����߶�bh��̽��������Zmin����ָ����бȽϡ�һ����ԣ����״�����N����������L��Сʱ���״�������ָ�꣨bs��bh��Zmin�����š�Ȼ������������״���ӣ�����ԽСԽ�ã���С������״���Դ���˷ѣ�Ӱ������Ч��ķ��ӡ�
����(3�������ۼ�����Ƚϣ��ձ������״����ɲ������������������˽ṹ��ȡ�ۼƿռ��ܶ�ֵ90%���״���Ϊ60 kmʱ������ֱ��bs����ֵΪ282.0m����Ͳ����߶�bh����ֵΪ52.6 m��̽��������Zmin����ֵΪ2.7dB;X�����״�����S����ҵ���״���ȣ���60km̽����봦���䲨��ֱ����С��Լ2����0°����ä���߶Ƚ�����Լ1.5����̽�������Ƚ�����2.4dB����ˣ��ڷ�λ�ֱ��ʡ�̽��ä�������ز�̽�����������ݿռ�һ���Եȷ�����õ����������ṩ�������1km������100m�ĸ�ʱ�շֱ��ʵ��״����ϣ����ڲ�������ǿ����������
����(4���ձ������״������ζ�����������ᡢ��Ӧ���˻���������������������һ���̶�ʽX����ȫ��̬˫ƫ������������״�ۺϿ������ձ�ƽԭ�״�ѡַ�ĸ������أ������״���������Ԫ����ý����������Σ�N=3,L=45��65km�������˽ṹ��5����ʱ�շֱ��ʵ�����̽���״����3�������������εĵ�Ԫ����Ƕ��S�����״�ҵ�����ڣ��γǡ�������̩���״��м䣩�������ɽ�һ�������״��������ؿ��۲����������ڸ��ʵ�������������������X���������״��C��������������״
���������
����[1]κ���㣬�������й����������������[J]������1995,21(5):37-40.
����[2]�ⷼ������С������־�գ��ȣ��ձ�������������籩�����������״�ز�����[J]������ѧ����2013,71(2):209-227.
����[3]֣���⣬���Ľ���Ҧ�����ȣ����ٵȼ�����2016��6��23�ո�������ǿ�ȹ���[J]������2016,42(11):1289-1303.
����[4]��С�ᣬ������Ľ����ȣ�2016��6��23�ս��ո���EF4��������������[J]������2016,42(11):1304-1314.
����[5]��褣��T�أ������Σ�2016��6�½��ո���һ�γ�ǿ��������������[J]���й������ѧѧ������Ȼ��ѧ�棩��2018,48(2):11-21.
����[6]�ܺ��⣮“6.23”���ո���EF4������������������籩�г߶Ƚṹ�о�[J]����������ѧ����2018,61(9):3617-3639.
����[7]��أ���С���������״P��Ӧ��[M]����������������磬2011,229-234.
����[8] ��������ű�����ا���״�����ѧ[M]����������������磬2010,386-392.
����[9]�������κ���������ѣ��ȣ�˫��ƫ������������״�̽��ԭ����Ӧ��[M]����������������磬2018,181-185.
����[10]�����������ѣ������ˣ��ȣ�X��������������״�ز����ݶԱȷ���[J]����ԭ����2015,34(4):1167-1176.
����[11]�ν��£���ǿ���𩣬�ȣ��������״�̽���о���չ[J]���ɶ���Ϣ���̴�ѧѧ����2018,33(5):477-489.
����[12]Donaldson R J.Vortex signature recognition by a Doppler radar[J].J Appl Meteor,1970,9:661-670.
����[13] Fujita T T.Analytical meso-meterology:A review severe local storms[J].Meteor Monogr,1963,27:77-125.
����[14]Brown R A,Lemon L R,Burgess D W,et al.Tornado detection by pulsed Doppler Radar[J].Mon Wea Rev.,1978,106:29-38.
����[15]Atkins N T,Butler K M,Flynn K R,et al.An integrated damage,visual,and radar analysis of the 2013 Moore,Oklahoma,EF5tornado[J].Bulletin of the America Meteorological Society,2012,95(10):1549-1561.
����[16]Bluestein H B,Pazmany A L.Observations of tornadoes and other convective phenomena with a mobile,3-mm wavelength,Doppler radar:The spring 1999field experiment[J].Bulletin of the America Meteorological Society,2000,81(12):2939-2952.
����[17]��С����֣���£������ȣ�һ�ΰ���ǿ��������ǿ��ˮ��������籩�о�[J]��������ѧ��2008,32(3):508-522.
����[18]����ά����껣�Ԭʥ���ȣ���һ��˫ƫƫ�����״CINRDA/SAD����ϸ��̽�⼼��[J]������Ƽ���2020,48(3):331-336.
����[19]�����ã��ν��£�ʷ�����ȣ��������̵ָ߳IJ����ڵ����������״ﶨ�����⽵ˮ��Ӧ��[J]������Ƽ���2020,48(1):9-14.
����[20]��骣����������ȣ�����̫���������һ�������״�̽�⾫��[J]������Ƽ���2018,46(6):1065-1072.
����[21]Ҷ�ɣ������ӣ��ĺƣ��ȣ���һ�������״��һ������[J]������Ƽ���2020,48(3):322-330.
����[22]����������������껣�Geodesics�㷨���״�ͶӰת���е�Ӧ�ü���[J]������Ƽ���2020,48(1):1-8.
����[23]����骣��������������ѣ��ȣ����������״ﷴ�������糡��������[J]������Ƽ���2019,47(5):719-730.
����[24] ��С����֣���£��Ű��ȣ�����һ��ǿ���������̵Ķ����������״��о�[J]����ԭ����2006,25(5):914-921.
����[25]֣���£���췼�����裬�ȣ�ǿ������������籩����������Ԥ���о�[J]����ԭ����2009,28(3):617-625.
����[26]�ⷼ������С������־�գ��ȣ������籩��������������ǿ������[J]������2012,38(11):1330-1338.
����[27]�ܺ�����㣬����÷���ȣ���������������������籩��������������[J]������ѧ����2014,72(2):306-317.
����[28]֣���£��ű�����Х�����ȣ�̨�������Ļ����������״�ز��ṹ����[J]������2015,41(8):942-952.
����[29]����㣬������������ϲ���ȣ��dz������������籩�����������״��Ʒ������Ԥ��[J]������2014,40(6):668-677.
����[30]��ѧ�壬���������£����ηdz������������籩�������״������Աȷ���[J]����ԭ����2014,33(4):1164-1172.
����[31]�º�������������������ȣ������״�����Ľ�չ[J]��ң�п�ѧ��Ӧ�ã�2012,27(4):487-495.
����[32]����������ֲ�ʽ���������״����[J]����ѧ����2014(6):8-11.
����[33]��˼�ڣ��º���������죬�ȣ����绯�����״�Эͬ����Ӧ�۲⼼����ʵ��[J]������Ƽ���2016,44(4):517-527.
����[34] �������������״�Эͬ����Ӧ�۲ⷽ����˥�������о�[D]���������й���ѧԺ���������о�����2014.
����[35]�����죬�º���������٣��ȣ�����ʽ�����״���������ʵ��[J]��Ӧ������ѧ����2019,30(1):1-12.
����[36] Papoulis A.Probability,Random Variables,and Stochastic Processes[J].McGraw-Hill,1991.
����[37]Junyent F,Chandrasekar V.Theory and Characterization of Weather Radar Networks[J].Journal of Atmospheric and Oceanic Techinology,2009,26:474-491.
����[38]ҦҶ�࣬��Ө����������ȣ��������������Ļ����������ٽ�Ԥ��[J]����ԭ����2012,31(6):1721-1730.
����[39]���������⺣Ӣ�������壬�ȣ�÷������������������������������籩�ṹ��������[J]������2016,42(3):280-293.





