0 引言
粮食生产在很大程度上依赖于作物品种的改进、生产技术的完善,以及施肥量、施肥效率的提高[1].生产实践表明,在作物不同生长阶段,因地制宜施用肥料已经成为农事活动特别是作物增产措施的重要内容[2].合理利用化肥及研究施肥技术对我国农业发展有着非常积极的意义[3].变量施肥技术是精确农业的重要组成部分,它根据作物生长的实际需要,基于科学的施肥方法(如养分平衡施肥法、目标产量施肥法等)对作物进行变量投入,即按需投入[4].实践表明,变量施肥可大大地提高肥料利用率、减少肥料的浪费以及多余肥料对环境的不良影响,具有显着的经济、社会和生态效益.但传统的人工撒施肥料不仅施肥劳动强度大、生产效率低,而且施肥均匀性差;现有的撒肥机械当车速变化时,由于不能及时地改变排肥量,使得施肥量随车速增大而减少,不能满足农艺技术要求.研究表明,对于既定排肥口形状(如圆形、长方形、正方形等),排肥口开度与排肥量之间并非线性关系.为了提高撒肥机的施肥质量,本文对变量撒肥机关键设计参数(肥料高度对施肥量的影响、排肥口开度对施肥量的影响)进行研究,并在此基础上设计一种基于单片机的小型变量撒肥机控制系统.
1 关键参数确定
1. 1 肥料高度对施肥量的影响
变量撒肥机的肥箱有多种结构,如圆筒形、圆锥形、方锥形、方形等.在实际应用中,方锥形的肥箱应用最广泛,因此选择一种方锥形的肥箱来研究肥料高度对施肥量的影响.
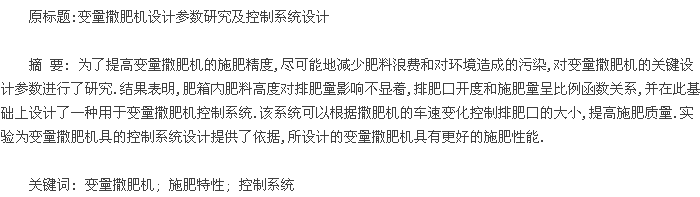
将固体颗粒肥料在排肥口开口大小一定的情况下,在肥箱内肥料平面以下的不同高度测其流量,每次取10 个不同高度,测得10 个流量值,通过8 次实验所得数据如图 1 所示.从图 1 看出,流量和高度之间不成比例函数关系,流量始终在 0. 100kg/s 左右,上下浮动不超过 10g,偏差范围不超过 1% .因此,高度对流量影响不大,在实际应用中可以不考虑高度对施肥量的影响.
1. 2 出肥口开度对施肥量的影响
排肥口形状有圆形、长方形、正方形多种形式,本次试验排肥口选择为长方形,试验所用肥料为普通颗粒尿素.
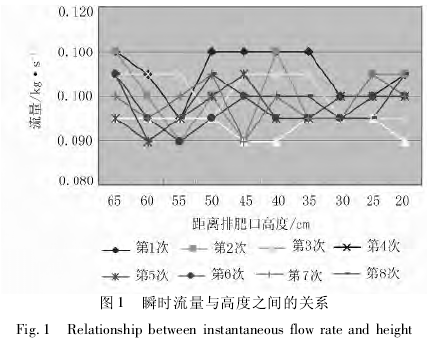
将相同质量、相同种类的固体颗粒肥料放入肥箱中,分别在排肥口总开度 S0的 2 /10、3 /10、4 /10、5 /10、6 /10、7 /10、8 /10、9 /10、10 /10 时测量肥料流完需要的时间,重复进行 5 次,求其平均值;然后将不同排肥口开度排完定量体积肥料的时间换算成单位时间的排肥量(流量),得到排肥量与排肥口开度之间的关系,如图 2 所示.从图 2 可以看出:所选用颗粒状肥料在长方形排肥口条件下,排肥口开度与排肥流量之间并不是线性关系(阀门移动距离越大,排肥口开度越大),而是呈抛物线函数关系.这表明,随着所需流量的变化,排肥口开度也要符合抛物线函数关系变化,才能提高施肥质量.
本机构中施肥机每公顷的排肥量 Q (kg)为

根据拟合曲线得到关系式如式(2),R 的检验值为0. 991 6,达显着水平,表明式(2)可用于本实验装置排肥量修正.式(2)为

其中,q 为排肥量,kg/s; v 为机具前进速度,m/s;B 为施肥机行走距离,m; s 为阀门移动距离,m.每一种变量施肥机排肥口形状和尺寸不尽相同,在不同的撒肥机设计时应根据实际排肥口尺寸再做实验,确定其函数关系.
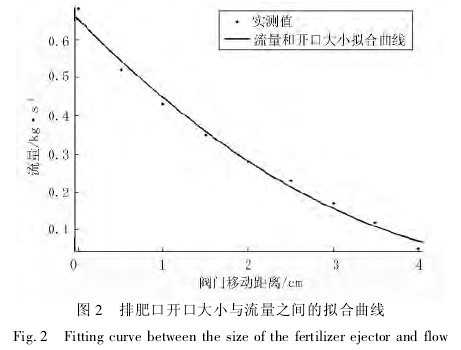
2 撒肥机的硬件选择与设计2. 1 撒肥机的整体结构变量撒肥机由车速信息采集系统、单片机控制电路、步进电机驱动系统、排肥设备等 4 部分组成.车速信息采集系统由电磁传感器来完成,通过采集机具的运行速度和设定的肥料施撒信息一起输入单片机控制电路,经过运算得出所需的脉冲数;将这个脉冲数输入步进电机的驱动器,控制步进电机变速转动,进而改变排肥口的大小,按需输出肥料.其变量施肥机控制结构如图 3 所示.
目前,微控制器的型号和种类有很多(如 M3 系列、MSP430 系列、STC51 系列等),每一款微控制器都有自己的优势和适用的环境.本次设计对微控制器的要求主要有:
1) 稳定.系统工作环境比较复杂,温湿度变化大,而且灰尘比较大,要求微控制器能够在较复杂环境下正常工作.
2) 控制能力强.本系统中机电设备较多,包括两个行走电机和一个物料投放控制电机,还包括行驶路程检测等,这就要求选用的微控制器具有强大的控制能力.
3) 较高的运行速度.系统中需要控制器对物料质量、行驶路程做出准确而快速的判断,及时调整行驶速度和物料投放速度.根 据 以 上 实 际 需 求,本 系 统 选 用 工 业 级STM32F103R8T6 作为本系统的核心微控制器.该微控制器包含一个主频为 72MHz 的 ARM 32 - bit Corte-xTM- M3 核心,存储空间 包含 128 kb Flash 和 20kbSRAM,43 个中断源,最多 47 个可用 I / O,包含有多个PWM 输出单元;此外还包含有丰富的接口模块,如I2C 接口、UART 和 CAN 等,宽工作电压,2. 0 ~ 3. 6V皆可正常工作.
2. 2 控制系统设计
根据系统要求,整个单片机控制电路包括机具作业速度信号输入及控制脉冲输出等部分.
2. 2. 1 撒肥机行程和作业速度的采集
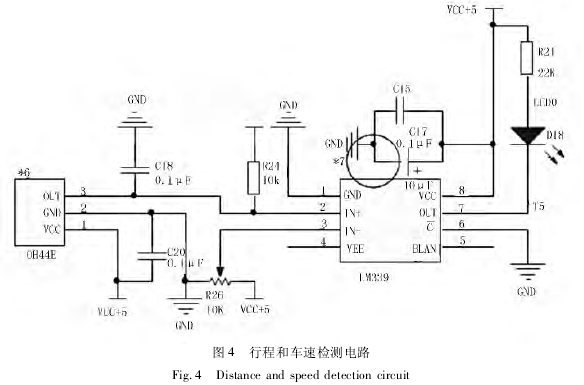
在本次设计中,机具的作业速度是一个不可忽略的因素.行程和车速检测一般都是采用光电传感器或电磁传感器记录车轮或主轴转动圈数的方法.本设计选用的是电磁传感器,在主动轮上安装永磁体,通过霍尔开关记录车轮转动圈数;用单片机对单位时间内脉冲进行检测,测得到运行时的车速.选用的霍尔传感器为 OH44E,该传感器体积小、功耗低、电路简单、便于安装.行程和车速检测电路主要由霍尔传感器和比较器组成,应用电路如图 4 所示.
2. 2. 2 控制脉冲输出
由于步进电机的驱动电源具有功率放大电路和脉冲分配器,因此单片机输出给步进电机的仅为 5V电源和控制脉冲信号.5V 电源与步进电机的驱动电源共地,实现脉冲压差,达到了高低电平的转换[5].
3 控制软件设计
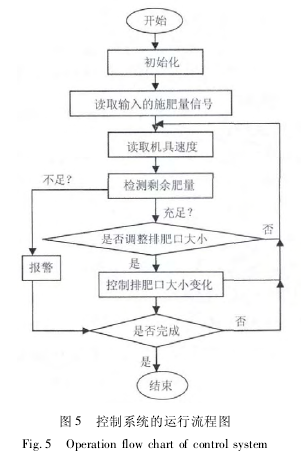
本设计以 C 语言为开发平台,开发变量施肥机控制系统[6].该系统可根据车速的变化而改变施肥口开度大小,并对不同施肥口开度施肥流量用所得修正函数(公式 2)进行修正,进一步提高施肥质量.其控制系统流程图如图 5 所示.
4 结语
1) 对于固定施肥量的撒肥机,机组前进速度的变化会导致施肥量变化.因此,撒肥机的施肥量应根据车速的变化自动改变施肥量,即变量施肥.
2) 本研究对肥料高度对施肥量、排肥口开度对施肥量的影响进行了实验研究.实验结果表明,肥料高度对施肥量对施肥影响不大,在撒肥机设计中可以忽略不计;但排肥口开度对施肥量有较大影响,在产品设计中应加以控制.
3)基于单片机的撒肥机控制器,可以满足撒肥机变量控制需要,变量控制显着提高施肥精度[7].
参考文献:
[1] 段洁利,李君,卢玉华. 变量施肥机械研究现状与发展对策[J]. 农机化研究,2011,33(5):245 -248.
[2] 龚艳,丁素明,付锡敏. 我国施肥机械化发展现状及对策分析[J]. 农业开发研究,2009,9(5):6 -9.
[3] 马旭,马成林,桑国旗,等. 变量施肥机具的设计[J]. 农业机械学报,2005,36(1):50 -53.
[4] 张伟. 农业发展的新课题精确农业[J]. 农业工程学报,1997,13(3):249 - 252.
[5] 王晓明. 电动机的单片机控制[M]. 北京:北京航空航天大学出版社,2002.
[6] 孙成. 变量施肥机控制系统的研究[D]. 长春:吉林农业大学,2007.
[7] 孙裕晶,马成林,张书慧. 智能变量施肥技术初步试验研究[J]. 农机化研究,2003(4):185 -188.





