摘 要: 随着能源枯竭和环境污染日益严重, 纯电动汽车逐步进入人们的视野。其中, 电动轮汽车以其各轮转矩能够独立控制的优势, 成为了今后电动汽车发展的方向。本文在分析了电动轮差动助力转向系统受力情况的基础之上, 建立了研究所必要的整车模型。
关键词: 电动轮汽车; 转向系统; 受力;

0、 引言
自汽车出现以来, 随着其性能不断提高, 同时成本的不断降低, 汽车的应用越来越广泛。但是, 另一方面汽车工业也造成了严重的环境问题。因此, 节能、环保的纯电动汽车的研发及普及是当今社会的必然趋势[1]。
电动轮驱动汽车利用左右车轮的轮毂电机输出转矩的不同, 得到汽车的转向功能;利用电动轮毂电机实现附加的转角, 从而得到主动转向能力。通过控制左右轮毂电机, 能够实现差速转向功能, 提升传统转向系统的性能, 减轻驾驶员劳动强度, 提升汽车的操纵稳定性[2]。
1、 数学建模
借助固连在运动着的汽车上的车辆坐标系来描述汽车的运动:当车辆在水平路面上处于静止状态时, 坐标系原点o与汽车质心重合, x轴表示为汽车前进方向, y轴表示为汽车侧面方向, z轴表示为车辆的垂向方向, 向上为正。
前期学者的研究一般使用二自由度的模型进行研究, 其模型不考虑车辆的侧倾[3]。而本文考虑车辆的侧倾对汽车转向系统的影响, 使用包含侧倾的三自由度汽车模型, 并对该模型作如下假设:
(1) 忽略转向系统机械机构阻尼和机械损耗的影响, 将转向力直接施加于转向车轮;
(2) 考虑汽车只作绕x轴的旋转运动, 而不作其他的旋转运动以及汽车车速u不变;
(3) 汽车的y轴加速度限定在 (-0.4g, 0.4g) ;
(4) 不考虑空气动力学对转向系统的影响;
(5) 将汽车轮胎假设为刚性体。
水平面上的所有角度 (包括前轮转角、侧偏角等) 及对应的角速度与角加速度都取左转为正, 侧倾角及其角速度以右倾为正。同时, 假设:1) 汽车的质心位于垂直于地面的中分平面内, 汽车左右两侧对此中分平面是对称的;2) 非悬挂质量的质心也在x轴上;3) 侧倾轴线与x轴重合。
首先确定汽车质心加速度在车辆坐标系上的分量。
因为汽车转向系统转向时, 汽车会产生平移和转动, 在t+Δt时刻, 车辆坐标系o点的速度矢量发生改变, 同时车辆坐标系的x轴和y轴的方向同时发生了改变, 因此, 沿oy轴的速度分量的变化为:
(v+Δv) cosΔθ-v+usinΔθ=vcosΔθ+ΔvcosΔθ-v+usinΔθ由于Δθ很小, sinΔθ≈Δθ, cosΔθ≈1, 上式可以化为:
除以Δt并计算其极限, 得到在该坐标系下的oy轴的分量。

同理可得汽车质心绝对加速度在车辆坐标系ox轴的分量:
设质心侧偏角为β, 则, 则式 (1) 可写作:

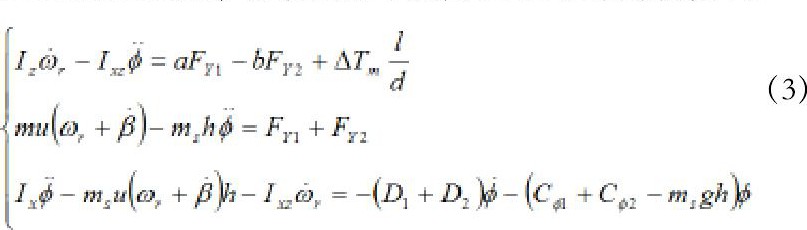
根据D Alembert理论, 分析出整车线性3POF运动微分方程:

2、 结论
在阅读和研究了相关文献的基础之上, 建立整车考虑侧倾的线性3POF的汽车模型, 进行分析差动转向系统的受力, 建立转向系统数学模型。
参考文献:
[1]陈清泉, 孙逢春, 祝嘉光.现代电动汽车技术[M].北京:北京理工大学出版社, 2002
[2]胡长健.电动轮驱动车辆的驱动力助力转向技术研究[D].长春:吉林大学, 2008.
[3]王军年.电动轮独立驱动汽车差动助力转向技术研究[D].长春:吉林大学, 2009.





