摘 要: 某类及时诊断仪器中要求生化探针深入到样本或试剂池中,将池中溶液搅匀,并在探针表面得到特异性吸附物或清洗掉非特异性吸附物,为解决该问题,设计一种新型的探针抓取与旋转机构,既能自动抓取探针,又能使探针绕其轴心高速旋转,利用旋转功能实现将溶液搅拌混匀的效果。该机构结构紧凑,可应用在便携的及时诊断仪器中,同时可实现微量样本的检测,并节省试剂的使用量。
关键词 : 生化探针;抓取与旋转;搅拌混匀;及时诊断;
1、 引言
某类体外诊断仪器的检测原理是用生化探针依次深入样本液、试剂、清洗液,使样本和试剂中的待测成分充分地特异性吸附在探针表面,并在清洗液中清洗掉非特异性吸附,然后用检测装置对探针表面吸附的待测成分进行定量检测。样本液和试剂的均质化越好[1],非特异性吸附物越少,则检测结果就越准确。
目前的这类体外诊断仪器采用晃动台(shaker)的方式来实现样本和试剂的混匀和提高清洗效果,方法是将装有样本液、试剂、清洗液的多孔容器置于晃动台上,探针抓取机构只负责抓取探针依次深入并悬停在样本液、试剂或清洗液中,等待晃动台带动多孔容器做高频微幅晃动,通过高频晃动实现溶液的均质化,并将待测物充分地吸附到探针表面。这个方法的缺点是:晃动台结构不能做得太小,不能适应便携式及时诊断仪器的尺寸要求;晃动频率一定的情况下,晃动幅度不能进一步减小,由于探针悬停在溶液孔中,孔的直径不能做得太小,以免孔壁与探针相撞,这也就不能满足及时诊断仪器所追求的减少样本和试剂消耗的要求[2]。
2、 生化探针自动抓取与旋转方案
为解决上述晃动台混匀方法不便于应用于便携式及时诊断仪器内的问题,拟采用探针旋转的方式,以探针的快速旋转实现对溶液的搅拌来达到将溶液混匀的目的。
2.1、 方案需求
探针旋转的动作显然是在探针抓取机构上实现的,如图1所示,该机构安装在平移运动机构上,能在指令的控制下实现:“抓取探针、提升、运动到下一个工位、下降、旋转探针、提升、……、释放探针”的动作流程。
该机构需要满足结构紧凑的要求,便于应用于便携式仪器内。
2.2 、方案设计思路
可以分别实现抓取动作或旋转动作的机构都有很多种,实现抓取动作最常用的有夹爪机构,夹爪机构在原动机的驱动下进行开合动作,实现对探针的释放或夹紧;实现旋转动作的机构可分为同轴驱动和不同轴驱动,同轴驱动即驱动器件(一般是电机)的转轴与探针轴线同轴,显然,同轴驱动的旋转机构会占用更多的轴向空间,不同轴驱动需要用到诸如齿轮、同步带等传动机构。单独的抓取或旋转机构都很简单,而要将两种运动形式放在一起去实现时就需要考虑这两种运动如何进行解耦,不使它们产生运动耦合[3]。
通过上述分析,探针自动抓取与旋转机构可采用的设计方案如图2所示,探针抓取可采用夹爪机构,夹爪动作采用曲柄滑块机构[4]实现,其中曲柄构件作为夹爪是末端执行件,滑块是原动件,滑块的上下滑动可以由电磁铁和弹簧驱动,夹爪机构的整体作为旋转对象,其旋转轴与被抓起的探针轴线重合,其旋转运动可以由旁置的电机通过同步带传动实现,夹爪整体的旋转运动与滑块的上下运行这两种运动的解耦可以采用推力轴承。
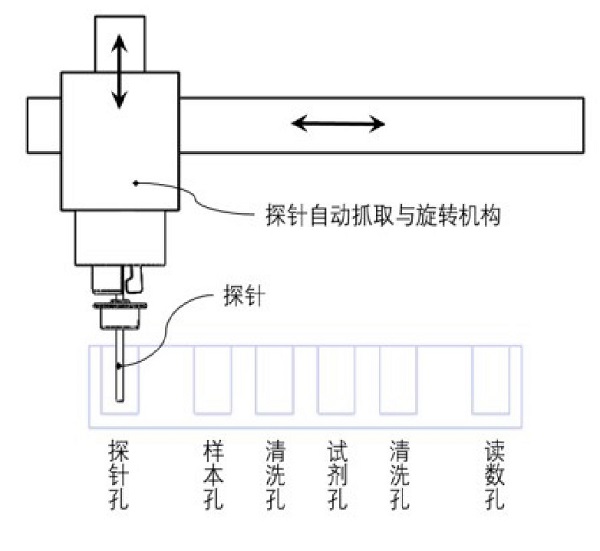
图1 探针自动抓取与旋转方案示意图
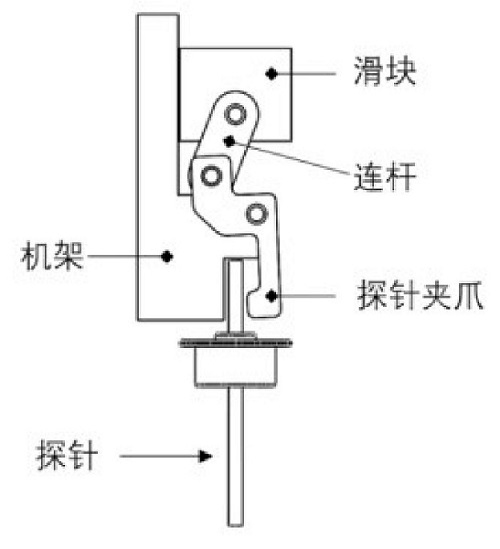
图2 用曲柄滑块机构实现探针抓取的方案示意图
3 、自动抓取与旋转机构的结构设计
3.1、 总体结构介绍
自动抓取与旋转机构的总体结构如图3所示,抓取机构由探针定位器、探针夹爪、连杆、滑块、推力轴承、推力轴承座、铁磁盘、电磁铁、导向销、弹簧等零件组成,旋转机构由步进电机、同步带轮、同步齿形带、探针定位器、交叉滚柱轴承等零件组成。
如图3所示,探针定位器是抓取机构(曲柄滑块机构)的机架,它既与探针夹爪通过一处销轴构成转动副,又由其上端的圆筒内表面与圆柱体的滑块外表面构成移动副,探针夹爪和滑块分别与连杆通过转动副连接,滑块在探针定位器内的上下运动可转化为探针夹爪与探针定位器轴线的夹角变化,通过该夹角变化实现抓取探针和释放探针的动作。抓针定位器还是对探针实现定位的零件,在其下部有V形槽对探针的圆柱外表面径向定位,保证了探针轴线与定位器轴线重合,有一个平面对探针进行轴向定位,保证每次抓取的探针在抓取机构里的轴向位置都能保持一致,有利于生化检测结果的可靠性。抓针定位器也是实现旋转运动的主体,在其上部安装了交叉滚柱轴承,可经由同步带传动机构被步进电机驱动旋转,将探针抓取以后,探针则在摩擦力作用下与抓取机构暂时地合为一体,一起旋转。
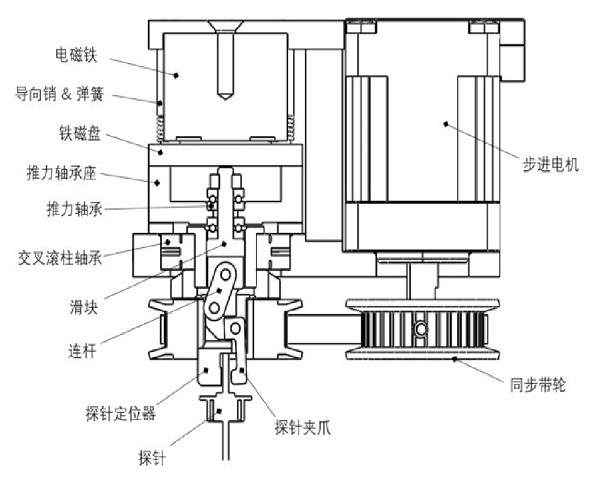
图3 自动抓取与旋转机构的总体结构
滑块与推力轴承座通过一对推力轴承保持轴向一致运动,支点导向销和弹簧将铁磁盘与推力轴承座压紧在一起,如图4所示。电磁铁通电后可将铁磁盘向上吸起,铁磁盘将向上的力传递给弹簧,又传递给导向销,再带动推力轴承座向上运动,从而使探针夹爪的末端压紧探针。弹簧的作用有两个,一是缓冲,使刚性的磁吸力变为弹性的夹紧力;二是由于弹簧的作用行程较大,可以在一定程度上放宽零件的尺寸精度要求。
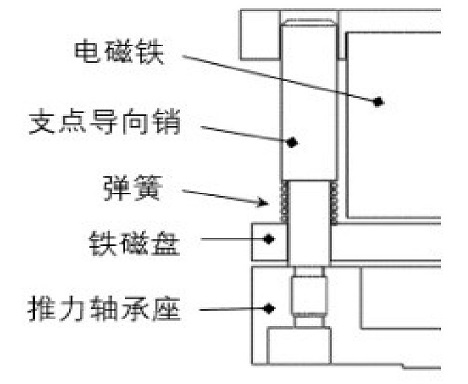
图4 磁吸力缓冲结构示意图
3.2 、抓取机构设计
抓取机构是应用了曲柄滑块机构的原理,滑块是原动件,探针定位器是机架,探针夹爪相当于曲柄。按照方案需求中要求的小型化原则,由轴承、电磁铁等标准件的最小型号可大致确定了探针定位器的尺寸,然后连杆长度和探针夹爪的尺寸也都可大致确定,再设定探针夹爪的末端行程为±0.5mm(以夹爪压紧探针的位置为原点,朝着继续压紧的方向为负值,朝着松开的方向为正值),又因电磁铁磁力的作用距离有限,设定滑块的上下移动行程为0.5mm,即以滑块的0.5mm行程对应探针夹爪的末端行程±0.5mm。
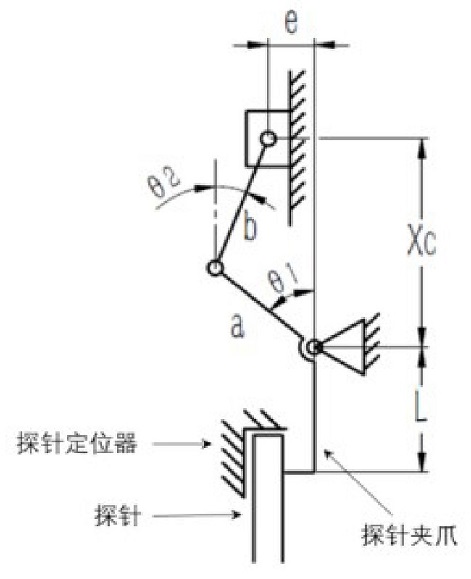
图5 抓取机构运动分析模型
如图5,建立曲柄滑块机构的数学模型,则有解析算式如下:
在solidworks中用作图法可初步确定图5中的各参数值:e=1.6mm,a=4.46mm,b=5mm,L=7mm,θ1=47.73°,θ2=19.88°,根据“探针夹爪的末端行程为±0.5mm”,则θ1的变化范围是47.73±4°(43.73°~51.73°),代入上式可验证Xc的运动范围是:Xc=8mm~Xc=7.4mm,即滑块运动形成是0.6mm。
3.3、 探针的夹紧力分析
根据3.1节的介绍可知,抓取机构将探针抓取以后对探针的夹紧力是由弹簧力提供的,将推力轴承座(与滑块连接)压紧到铁磁盘的弹簧力应该要小于电磁铁对铁磁盘的磁吸力,选用的电磁铁吸力为20N,选用的弹簧常数是1.5Nmm,共使用4个弹簧,弹簧预压力为1mm,弹簧的工作行程约0.2mm,则弹簧对滑块的作用力范围是6N~7.2N。
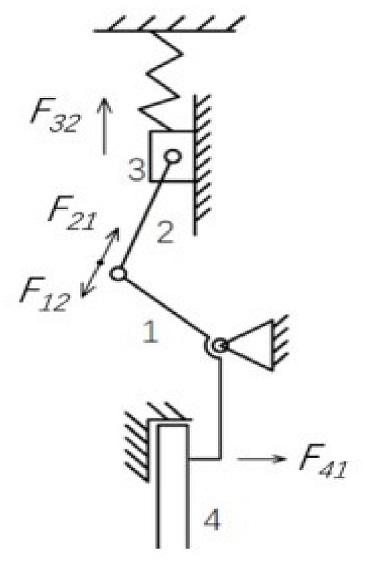
图6 探针夹紧力分析模型
图6是对探针夹紧力的分析模型,F32表示滑块对连杆2的作用力,则F32=6N~7.2N。在图6中,分别以曲柄1和连杆2作为研究对象进行受力分析,则有:
已知抓取状态下的θ2=19.88°,可求得F41=4.1N~4.9N,即探针被抓取以后所受到的夹紧力范围是4.1N~4.9N。探针是用玻璃做成的外径1mm、长度10mm的圆柱棒,重量不到1g,转动惯量不到1g*mm2,经粗略计算,探针与抓取机构之间由夹紧力所产生的静摩擦力约0.4N,该静摩擦力远大于探针的重力,也可对探针产生足够的摩擦转矩,使得抓针机构能以足够大的旋转加速度带着探针一起旋转。
3.4、 抓取动作与旋转运动的解耦
推力轴承由轴圈、座圈、保持架、钢球组成,其轴圈的内径和外径都小于座圈,轴圈与轴配合,座圈与轴承座孔配合,两个推力轴承成对使用可在“轴”与“轴承座”之间传递双向轴向运动,并使“轴”与“轴承座”具有可相对转动的自由度。
如图3所示,推力轴承由于其轴圈和座圈可相对转动,所以它将抓取机构分成了可相对转动的两部分,其中探针定位器、探针夹爪、连杆、滑块和推力轴承的轴圈是一个可以旋转的整体,推力轴承的座圈、推力轴承座、铁磁盘等零件组成了一个只在电磁力和弹簧力的作用下做上下移动的不旋转的整体。在旋转部分做旋转运动的时候不会对不旋转的部分造成影响,即旋转运动不会对磁吸力产生影响。不旋转部分的上下移动也不会影响旋转部分的旋转状态,而不旋转部分的上下移动可转化为探针夹爪的抓取动作,不旋转部分如果是处在电磁铁上电而将铁磁盘吸合的状态,则旋转部分中的探针夹爪就是处于夹紧的状态。可见抓取动作与旋转运动实现了解耦。
4、 结语
根据体外诊断领域中及时诊断仪器的开发需求,提出了生化探针的自动抓取与旋转一体化机构的设计方案。利用三维设计软件结合理论计算和分析的方法,详细设计了基于曲柄滑块机构的抓取机构、旋转机构,并通过相应的解耦方法将抓取机构与旋转机构结合在一起,完成了一体化结构设计,极大地节省了空间,同时具有结构简单、控制方便的优点。
参考文献
[1]曹春哲.比色法测定液相混合时间及其在体外诊断试剂生产中的应用[J]生物化工,2020,6(6):85-88.
[2]李晓琼,杨春华潘邵武等面向POCT应用的微流控芯片技术综述[J].世界复合医学.2015,1(1):30-37.
[3]沈惠平,能坤,孟庆梅等并联机构运动解耦设计方法与应用研究[J].农业机械学报,2016,47(6):348-356.
[4]谭群燕,刘默,刘楷安,等.干摩擦间隙曲柄滑块动态特性研究[J]现代制造工程2020,9:122-127.





