摘要:随着IC制造行业对晶圆表面高洁净的要求,半导体清洗设备向高自动化、多功能化的方向发展,这就对设备上下料技术方案提出了新的要求和挑战。文章结合IC制造行业中全自动半导体清洗设备的发展现状,对其上下料技术方案进行了详细介绍与研究。阐明了目前上下料技术的发展现状及方向。可以为未来高端清洗设备的上下料技术方案提供参考。
关键词:高洁净; 清洗设备; 上下料;
1 半导体清洗设备发展现状
在半导体生产过程中,半导体产品的合格率很大程度上取决于产品表面的颗粒和金属杂质、化学物质的吸附。随着IC制造中关键尺寸的不断缩小,半导体产品在生产过程中的每道工序都需要严格经过多次的清洗步骤。目前湿法清洗技术仍是半导体IC行业的主要清洗技术,湿法清洗设备主要有槽式清洗、单晶圆清洗。本文主要介绍槽式清洗设备中的上下料技术方案。
根据半导体生产过程中的工艺需求和设备的自动化程度,槽式清洗设备又分为手动清洗机、半自动清洗机和全自动清洗机。手动设备在实际的应用过程中存在工艺一致性差、效率低下、无法适应大批量生产等缺点。目前,性能可靠、功能完善、自动动程度高的全自动清洗机在半导体制造行业中占据越来越高的市场份额。
2 全自动半导体清洗设备工艺过程及原理
2.1 全自动半导体清洗设备工艺流程图(图1)

图1 全自动半导体清洗设备工艺流程图
2.2 全自动半导体清洗设备工艺过程及原理
全自动半导体清洗设备的工艺流程如图1所示,位于设备的左右两侧分别为该设备生产工艺的起始位置和结束位置,位于工艺起始位置的工位为上料位,位于工艺结束位置的工位下料位,位于上料位和下位之间是工艺槽体工位,所有槽体工作在洁净、全封闭的结构中,设备的正面有透明PVC观察窗口。人工将待清洗的片盒放置在上料位,系统检测到上料位的片盒后,由机械手按照预先设定好的工艺路径在工艺槽体之间传输片盒,工艺流程完成后,机械手将清洗好的片盒放置于下料位置,同时设备发出报警指令,工作人员接到报警指令后,在下料位置人工手动取走清洗好的片盒。设备工作台左右两侧分别配置PTFE材质的水汽枪,可用于清洗设备台面及工件。
3 全自动半导体清洗设备上下料技术方案
3.1 单工位固定上下料位
单工位固定上下料位结构示意图,如图2所示。
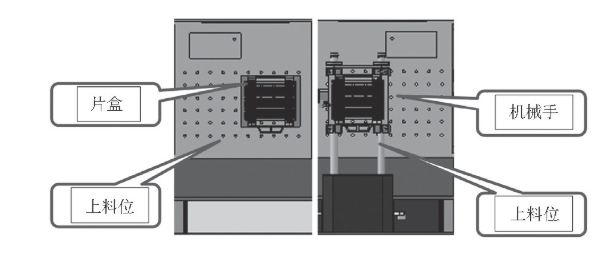
图2 单工位固定上下料位结构示意图
该技术方案实现了自动设备的自动上下料的功能需求,该工位的主要功能是料盒的检测和存放,实现了人工操作与设备自动化工作之间的结合。不过在上下料的过程中需要操作人员手动操作,这就要求工作人员在上料的工程中必须将片盒准确的放置在机械手可以抓取的位置,否则,设备将会因机械手无法准确抓取片盒而停止工作并发出警报。并且,由于人工操作的工位和机械手工作的工位为同一位置,设备无法做到与外部环境的很好隔离,有外部环境对设备环境造成污染的可能,工作人员在操作过程中更是有可能与机械手相遇,存在人员安全隐患。在实际中该技术方案多应用于中端自动清洗机。
3.2 单工位"回"字形上下料位
单工位"回"字形上下料位结构示意图,如图3所示。

图3 单工位"回"字形上下料位结构示意图
该技术方案在使用过程中,利用晶圆抬升部件的X、Z向的运动实现晶圆从料盒中的抬升,利用料盒传送部件的X、Y、Z向的运动,实现料盒在A、B、C、D不同位置的运动。晶圆抬升部件的X向运动采用电机、导轨丝杆结构,从而实现晶圆抬升过程中的精准定位。料盒抬升部件在X、Y、Z方向分别安装有3个气缸,从而实现料盒在不同工位之间的传送。上下料台面部件上分别安装有晶圆检测传感器和料盒检测传感器,以上料为例,操作人员将载满晶圆的料盒在A工位上料,此时料盒检测传感器检测到工位A的料盒则启动上料程序,料盒传送部件将料盒传送到C工位,C工位的晶圆检测传感器检测到料盒中的晶圆则启动晶圆抬升程序,将料盒内晶圆抬升到机械手可以抓取的位置,机械手在工位C完成取料,此时晶圆检测传感检测到料盒为空,同时料盒检测传感器检测到C工位有空料盒,则启动料盒传送部件,将空料盒传送到D工位,完成上料。
单工位"回"字形上下料技术方案实现了操作人员与机械手工作区域的隔离,并且实现了连续上下料,在运行效率和人员安全方面有了极大的提升,现已应用于较复杂的全自动清洗设备。
3.3 多工位上下料位
多工位上下料位结构示意图,如图4所示。
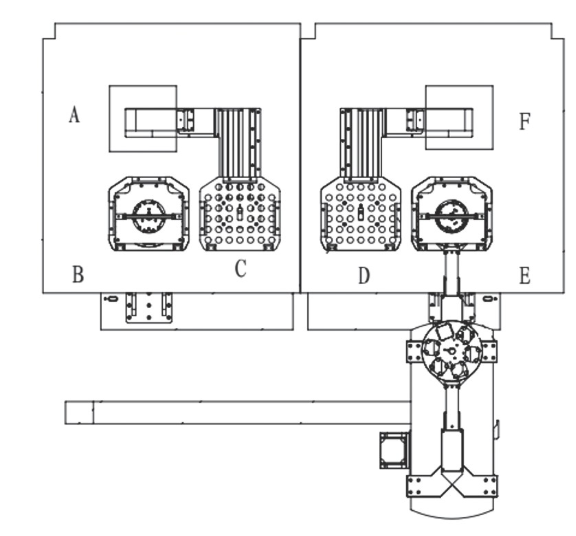
图4 多工位上下料位结构示意图
该技术方案在使用过程中,上下料传输部件中的十字滑台可以实现料盒由人工上料位A传输至机械手上料位C,通过上下料传输部件中的抬升机构在机械手上料位C处将料盒进行抬升,此时机械手运动至对应的工位将料盒中的承载盘取出传输至设备中指定的工位;在人工上料位/机械手上料位B,人工将料盒置于料盒托盘上,通过上下料传输部件中的抬升机构将料盒进行抬升,此时机械手运动至对应的工位将料盒中的承载盘取出传输至设备中指定的工位。下料过程与上料过程相对应。料盒的传送由料盒托盘上的激光传感器进行检测控制。
多工位上下料技术方案中,设置了两组上下料工位,这就使得同一台设备运行不同工艺路线成为现实,有效解决了设备运行单条工艺路线时工艺槽体的闲置问题。尤其是价格高昂的高端设备,多工位技术方案的应用具有很高的经济价值,目前该方案已应用与部分有需求的客户。
4 结语
随着IC制造行业对晶圆表面高洁净的要求,半导体清洗设备向高自动化、多功能化的方向发展,这就对设备上下料技术方案提出了新的要求和挑战。文章提供的上下料技术方案目前均已在实际的的生产中得到了应用,并取得了良好的效果。未来IC行业的制造将要求在更加清洁的环境中生产,设备必须实现全面的自动化、无人化生产,智能制造将是IC行业普遍的发展趋势,自动上下料技术作为设备智能化进程中的关键技术,还需要从业进行深入的研究,以适应未来设备的发展。
参考文献
[1]林晓杰,刘丽君,王维升。半导体硅片清洗设备研究进展[J].微处理机,2012.
[2]段成龙,祝福生。全自动半导体RCA清洗机[J].清洗世界,2013
[3] T. Hattori."Particle Reduction in VLSI Manufacturing," Contamination Control and Defect Reduction in Semiconductor ManufacturingⅢ[J].Pennington,NJ:The Electrochemical Society, 1994:3.
[4] 郝勇。单晶硅生产工艺中的关键技术[J].工业,2016(7)。





