摘要:针对外界因素导致传统排水系统失灵情况,提出自动控制器在给排水系统中的应用研究。分析给排水系统水泵损坏原因,使用JY32型号的水位控制器,确定其工作原理。从高低位水池水源量分析给排水双控应用,绘制泵控制曲线,改善以往固态降压起动存在的问题,调节转矩,控制喘振或冲击。设置防抖探,控制枯水、溢水问题。根据控制器内指示灯,控制给排水系统空泵运转。检测水位探头,控制缺水保护水位。
关键词:自动控制器; 给排水系统; 水泵; 保护;
泵一般直接与电机轴相连,当电机起动时,泵和液体将承受力矩的全部作用。因为对泵启动扭矩的要求不高,所以泵和液体从零速到全速的加速过程都很快,通常小于1秒,使泵的输出流量在短时间内由零速增加到额定容量[1]。由于短时间内快速的流量变化会导致系统出现喘息现象,因此系统需要保持平衡的状态[2]。而在应急冲击作用下的泵叶和管壁,在强压力瞬态下会引起管道移动,极易造成管道和支架的损坏。所以研究自动控制器在给排水系统中的应用是非常必要的,随着近年来自动控制器在社会各个行业的广泛应用,发挥了较高的稳定性和可靠性,而且具有编程简单、配置灵活等优点,为现代工业控制系统运行发挥了重要的作用[3]。
1 给排水系统水泵损坏原因及自动控制器工作原理分析
1.1 给排水系统水泵损坏原因
电机的转矩特性是用速度-转矩关系曲线来描述,转矩的变化与电机的转速变化成正比。当异步电机驱动变转矩负载(如离心泵),这时转矩的变化与电机的转速成比例,由于水泵直接与电机输出轴相连,压力变化与电机转矩变化成正比[4]。电机直接启动输出转矩大大超过了泵系统从零转速到正常工作点所需的转矩,泵电机的初始转矩是堵转矩,为满速转矩的180%。电机的临界转矩通常是其最大转矩,它产生于满转速附近,在这种情况下,电机的转矩大约是满转速的250%[5]。电机产生的转矩与负载所需转矩不同,用来加速负载与电机连接,根据泵系统显示,此时电机直接启动所产生的加速转矩使泵能很快地达到工作速度[6]。而泵速的这一突然变化,会导致泵系统相应管路中液体流动产生冲击或喘振,造成水泵损坏。
1.2 自动控制器工作原理
使用JY32型号的水位控制器,其连接线如图1所示。
引脚5、6表示工作电源输入端,引脚5-9表示控制器强电信号端,引脚0-4分别表示控制器弱电信号端。其中引脚1、2分别连接低位水池探头处;引脚3、4分别连接到高位水池探头处;引脚0;连接公共信号端;引脚7、8、9分别表示电隔离输出转换触点,通过输入探头通判结果,就能控制水位高低[7]。
图1 JY32型号的水位控制器连接线
2 自动控制器在给排水系统中应用
2.1 给排水双控
给水排水的应用场合有自动给水与排水,或同时控制两种给水方式,两套控制系统同时控制低位水源池(井、地槽)和高位水源池(水塔、楼顶水池)。该系统的工作过程为:当低位水池水位高于l端探头(准备泵水位)时,若高位水池(箱体)内水位下降到4端探头以下,则控制器端子7、8闭合启动电泵开始供水;当高位水池(准备泵水位)下降到3端探头或低位水池水位下降到2端探头以下(强制停止泵水位)时,控制器端子7、8闭合启动电泵断水[8]。
在低池水位高于1端探头时同时高池水位低于4端探头时开始重新启动,这样循环下如果低池中有足够的水源(水位总是高于1端探头,也就是始终连接l端和公共端0),其工作过程属于单独的给水控制方式。若低位水槽水源不足,或高位水槽用水过多(持续缺水,4端持续与公共端0断开)的状态下,则工作过程属于单独的排水控制方式,正常情况下两者可同时起作用[9]。
2.2 喘振或冲击控制
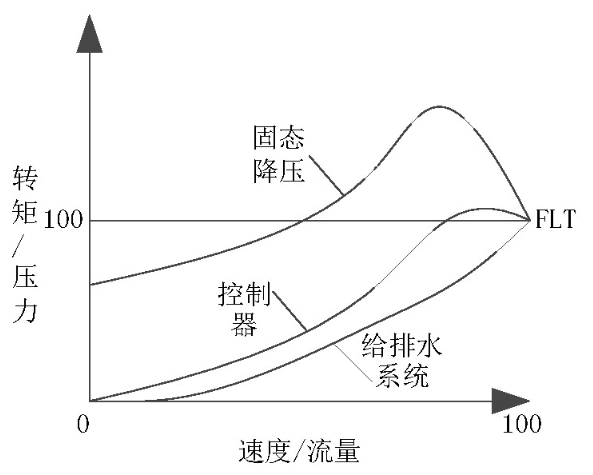
过去采用软起动、斜坡起动等固体降压起动方式,虽然降低了加速转矩,但无法消除喘振现象。电机端电压随时间增大,转矩也随之增大,超出直接启动时间,流量可以由零增加到100%,液流的冲击就会减小。加速扭矩越小,对负载施加的压力就越小,因此改变泵的速度所需的时间就越长。固体降压启动加速转矩比直接启动泵电机显着降低,这是因为固体降压启动电机初始电压较低,在一个可调时间周期内,其升力随升力上升至满电压,此时固体降压启动电机的转速也随之上升,这种转矩的突然变化会引起速度的突变,从而导致加速结束产生冲击和喘振现象[10]。针对该问题,采用带有泵控功能JY32型号的水位控制器来消除喘振冲击现象,如图2所示。
图2 泵控制曲线
马达的速度-转矩曲线是一种与给排水系统相关的特性,接近于恒定的加速转矩,而不需要转速计、流量或压力传感器和其他类型的外部反馈控制器,而是使用基于微处理器的马达反馈来实现。在电机加速过程中,应根据线电压和线电流的反馈,对电机端电压进行调整,并不断调整电机的基本特性,使其加速转矩接近恒定。因为转矩不会突然改变,所以电机运行平稳,水位控制器的振荡冲击或喘振表现为最小。
水位控制器具有特殊的水位控制功能,它可以像控制泵的电动加速那样控制其减速过程,在停机指令发生后,控制器可以监控电压、电流以及电机的反馈,从而使电机的速度不会突然改变。控制装置不断降低泵电机的转矩,并根据泵典型的速度-转矩曲线对转速进行修正,达到匀速平缓的减速效果,减小因流量突然变化对排水系统造成的喘振和冲击的影响。
2.3 枯水溢水越限制
JY32能够在探测低潮和溢出情况时立即发出报警信号。其实现方法是将0端连接到公共地面,2端探测器与地面池塘报警的位置降低,3端探测器与池塘顶部的岛屿报警位置降低,此时,探测器为最大报警位置池。
把探测器2和3放置在同一箱体的最低(干水)水位和最高(溢流)水位。如表面可能有波动,还应安装防振复位液位探头1、4。在液位低于2和3或高于3时,8和9关断钟报警(这也是一种强有力的停止泵信号),在正常范围内,与液位之间的1,4,9分钟内没有报警。因为1、4是防抖动复位探头,应该将探头4设置在探头3以下,而探头1应该设置在探头2之上。地震探测器和报警探测器之间的高度差一般在1~3 cm左右,略大于实际液波落差。
该接线方式在液位正常,电源接通或断开时自动复位,出现干式或溢流性报警信号后自动维护,无需防振检测。
2.4 空泵运转给排水控制
只进行供水控制时,JY32的1和2可用于监测管路中的水储备,也就是说,在任何高度泵叶轮实现1和2不引水(1、2和公用终端0)时,泵不工作(7、8),这时排水等待的指示灯点亮显示。一般情况下,在超低水位监测探头1和2的位置范围内,可添加3-30毫米以下4-end高水位池探头(第二端略低于l-endanti-shake稳定值),例如在液位启动后,如果不升却降到2点以下时,探头将自动关闭,与此同时,排水等待指示灯点亮进行指示警报。
2.5 缺水保护水位控制
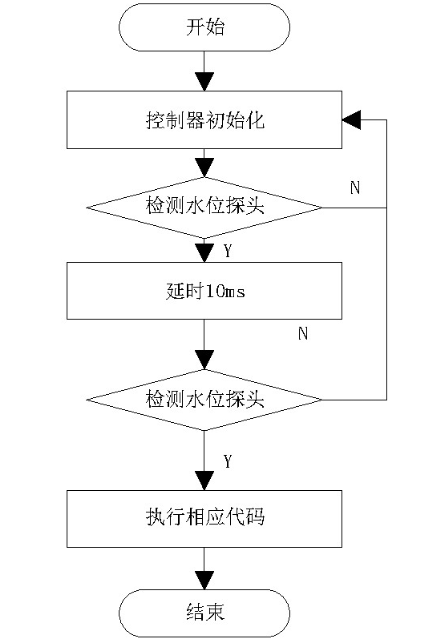
由于JY32型号的水位控制器在抽水过程会有一定的滞后性,因此在设计过程中应加强水位探头的检测,检测流程如图3所示。
图3 水位探头检测流程
启动后对系统进行初始化,当水位低于最低水位的情况下,水位探头1会检测到高水平信号,这时,控制继电器关掉,黄灯注水。若3号水位检测器在另一端未能及时探测到低电平信号,则表示无水,这时MCU立即控制继电器,保护水泵。在水位探头2检测到低电平信号时,表明水位已满,单片机接收到信号,控制继电器停止泵的工作。由于井水到注水口需要一定的时间,同时水位检测器3不能探测到低电平信号,但实际上井中可能还有水,因此程序需要等待一段时间。因为管道布置的不同,当泵在短时间内停止工作时,水位探头3可以探测到低水位,但泵已经停止工作,这是错误的逻辑,所以程序需要等待一些时间来再次检查水位探测器3。
水位探头是一根导线,连接在一端具有较大表面积的金属探针。因金属探头表面体积较大,与水的接触面较好,导电性能大大提高。如果控制器单片机管脚是浮点型,控制器的默认输出就是高电平,采用的水位探头通常有四种类型,即接地端、低水位端、高水位端和进水端。当达到高水位端时,将高水位端与共地端连接,并停止注水;水位正常时,将公共地面端与低水位端连接,并将公共地面端与低水位端连接;在注水期间,将进水端与公共地面端分离,并对缺水的水泵实施缺水保护。通过调节水位探头的安装高度,根据实际需要,可以实现对控制水位的调节,并在缺水时实现对水泵的保护,避免水泵因缺少水烧坏,造成经济损失。
3 结束语
给排水系统采用自动控制器实现了同步控制,有效防止电机空转、溢流和干水,减少了设备运转故障率,具有较高的稳定性和可靠性。其结构简单实用,被广泛地应用于家用泵、消防泵、污水泵、工业泵等系统控制,是一种行之有效的排水方法。自动化控制器可对多位水位显示,可以远距离观测储水排水情况,并通过相应的外围电路实现了设备的直接控制。控制器能够有效地保护设备,具有较强的抗干扰能力,有效提高了系统的安全可靠性和控制性,保障了给排水系统高效稳定地运行。
参考文献
[1]罗鑫. PLC与计算机在自动售饮料机控制系统中的应用[J].产业与科技论坛,2018,17(16):68-69.
[2]衣明辉,周梦慰.ACR9000运动控制器在金属蜂窝自动拼焊机控制系统中的应用[J].电工技术,2019,492(6):16-18.
[3]王执煜,齐永峰,丛喜东. PLC自动控制系统在液压式枝丫材打捆机中的应用[J].林业机械与木工设备,2018,46(6):37-39.
[4] 马斌.电气自动化技术在建筑工程中的应用分析[J].名城绘,2019,1(6):232.
[5]关玉霞.采集控制器在广播发射自动化监控系统中的应用[J].西部广播电视,2019,2(9):221-222.
[6]赵吉康,徐达,姜恩宇.分数阶PID控制器在自动电压调节系统中的应用[J].上海电力学院学报,2019,35(4):308-314.
[7]刘懋霖,周围.施耐德可编程控制器在康普艾空压机自动控制上的应用[J].自动化应用,2019,2(3):28-29.
[8]张绪磊.基于智能控制器的泵站自动化系统研究[J].工程技术研究,2019,4(20):135-136.
[9]高瑛.智能控制器在电气设备自动化中的应用[J].锅炉制造,2018,3(2):59-61.
[10]赵敏鹏,常文利.基于可编程控制器的污水自动控制系统设计[J].电子设计工程,2018,26(9):189-193.