���������˶����漼���ǻ���������ѧ���������ѧ�ͻ�����ѧ�����Ŀ�ѧ�о�������ͨ����������ģ�ͣ���������ѧ���������Ż����㷨���õ�������ɶ�����������ؼ��⡢�ؽڵ��������Լ���Щ��֯���˶��������˶�ѧָ��֮��Ĺ�ϵ��Ҳ���Խ����˶�������ϵͳ�Զ���Э�����ƻ�����������о���Ŀǰ�������˶����淽���Ѿ����㷺��Ӧ��������ҽѧ��������ѧ�����պ���ȶ������
����������������ǿ׳�����ʵ�ļ��죬�����ӱ�Ŀ�㼡���賦�������ǣ�ȷ���ؽڵ���������������������ѧ���ܣ����������������������������еĹ������о������������˶��У������˶���Ŀ�����ʡ�ǿ�ȡ����ء����������ص�Ӱ�죬�������˵ķ������ڲ��������������������ѧ������һ���̶���Ӱ���ż�������������˶��ɼ����ھ������������������У����������ļ������ˣ��缡���ס�������ѵȣ��뼡���������ѧ����������ء���ˣ��Ը�����ѧ���ܵ��о����˲���Ԥ��������������Զ���塣
�������ڸ���������������ʽṹ���������о��������ںܶ�����ԣ���ʵ���о��Ķ���Ҳ�����ڶ����ϣ�����ʵ����١��о�������ֲ������ѧ��������������Ӱ������Ӧ�ã���������̽���Σ�������ʵ�������豸�����ľ����ԣ�����ʵ�������˶����о����Ƚ��١�
��������������ѧ���漼���ķ�չ�����ڹ�������ģ�͵��˶����淽��Ϊ̽������������ѧ�����ṩ�˷��������о�ͨ��ҽѧͼ������������ѧģ�ͣ������û��ڶ�̬�Ż��ķ�����������֫����ļ�ʱ����������˶��ټ����ͼ������ģ�͵�������ѧ���淽�����Ƚϸ����ڿ������ܲ�ʱ������-���쵥λ�������Լ�����ĸ��ɣ��������������˲���������ѧ������̽�ָ��о������ڷ���������ѧ���ܷ����Ӧ�ã��Ӷ�Ϊ�����˶��˲���Ԥ���ṩ��ѧ���ݣ�Ϊ��һ�����������о��춨������
����1���о������뷽��
����1.1 �����
�����Ϻ�����ѧԺ�˶�ѵ��רҵ����ר�������˶�Ա 10 �������У�2 ������һ���˶�Ա��8 �����Ҷ����˶�Ա�����������䣨20.67±1.53���꣬���ߣ�1.83±0.04��m�����أ�70.33±2.52��kg��110 m ����óɼ� 14.5~15 s����������������Ϊ��������ȣ��Ұ��������κ���֫�˲���
����1.2 �������ݲɼ�
����1.2.1 �������� ��綯����ָ������������Ȱǵص����һ����������Ƚ��ŵ�����磬������Ⱦ��ŵػ��嵽������ؽ��������о���һ����������綯������Ϊһ��֧�����ڣ��������������ŽӴ�����̨��ʼ����ȫ�뿪����̨��������
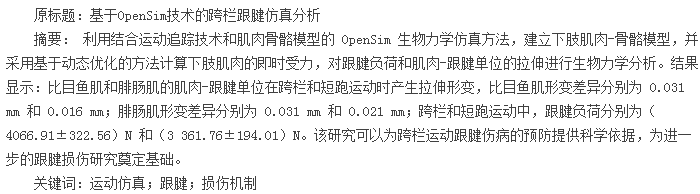
����1.2.2 �������� ÿ�����������ܲ����Ͻ��� 30 min �ij������֮���п�����ϰ������Ϥ���ء�������ɺ�������ȫ������ѧλ��ճ�� Maker �������������˶�ѧ���ݣ���ͼ1����
�����˶�ѧ���ݲɼ�֮ǰ��ÿ����������Ҫ�ɼ�һ�龲̬���ݣ�����ȷ������ؽڽ���ѧλ�úͼ���ؽ����ġ��ھ�̬���ݲɼ�����֮���Ƴ�������ϥ�ؽں��ؽڵ����˵㣬Ȼ����п�����Ͷ���������ݲɼ������������ݣ�Ҫ���������ڸ������ܺ��Խһ�����ܣ����������ݣ�Ҫ�������߸��������ͬ�����ƽ�ܡ�ÿ����������ɼ� 5 ��������ݺ� 5 ��������ݣ�1 ��ɹ����ݵĶ���Ϊ�������ҽ���ȫ���ڲ���̨�ϣ�ȫ���� Marker �����ɼ���
�������� Vicon16 ������ͷ���������Ӱϵͳ�ɼ��˶�ѧ���ݣ�Vicon Oxford Metrics��Oxford����� UK�����ɼ�Ƶ��Ϊ 200 Hz��ʹ�� 1 �� Kistler ����̨ͬ���ɼ����淴���������ݣ�KistlerCorporation��Ohio��USA�����ɼ�Ƶ��Ϊ 1 000 Hz��
����1.2.3 �������ݴ��� ʹ�� Vicon �� Workstation �� Bodybuilder���������˶�ѧ�Ͷ���ѧ���ݣ�ʹ�� Butterworth �����˲�����Marker ��Ĺ켣�����淴���������е�ͨ�˲����˲�Ƶ�ʷֱ�Ϊ 15 Hz �� 55 Hz��ʹ�� OpenSim ������������������洦�����̣����� Excel2007 ������������ͼ�����ơ�
����1.3 OpenSim �����½�ģ
������ͳ���淽���о��У��������漰�����˶��ĸ����ԣ�ͨ���������Ϊ�����ϵͳ��������ļ��⡢�������֯����Ϊ�������������������ء�Ӧ�� OpenSim �����ķ����о�����ͨ�����������������ģ�ͼ��㼡������С��ģ���е��������������������ʵ�ʲ��������������ϵķ����õ����ڽ��������о�ʱ�����������ɼ������徲̬�ļ�������Ӧ�ļ��㣬����ͨ��ģ�͵���Ϊ��������������������ģ�͡�ÿ�������߶���ר�ŵ�ģ�ͣ��Ӷ���֤�������ľ�ȷ�ԡ�
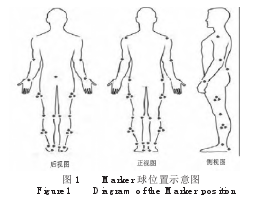
�������� OpenSim ����������ά��֫��������ģ�ͣ���ͼ 2�����������㼡�����������ģ���� 13 ���ڶΡ�12 �����ں� 23�����ɶȻ�е������ɣ����� 54 �鼡��-���쵥λ��������ʸ״�桢��״���ˮƽ���˶���ģ�͵�ͷ�����ֱۺ�������Ϊһ������ṹ������ڹ����� 3 ����ת�����ɶȡ������� 3 ��ά���Ͽ�����ת���ƶ����Źؽ���һ�����ѽ�ͷ��ϥ�ؽں��Źǹؽ�Ϊ�����ṹ����-��ǹؽ��� 2 �������ѧ����ƽ�еĹؽڣ�ÿ�鼡��ļ���ѧ�����ɽ���ѧģ�;������������������״�ǡ��Ż���ά���ȡ������ɳڳ��ȡ�����Ӧ��-�������ߺ������ټ�����
�������켡�������ѧ�������� 1��
����
�������� 54 �鼡��-����ṹ�е�ÿ����λ��Hill ����-����ģ��������ʾ��Ա����ͼ���-�����������ѧ��Hill ģ�Ͱ�����������Ԫ����һϵ�е���Ԫ����ƽ�е���Ԫ��������Ԫ����ʾģ���������������������Ե�ƽ�е���Ԫ���͵���Ԫ�����ڱ���Ԫ����ƽ�е���Ԫ����ʾ��֧֯�źͼ�����ά�����ӡ�ƽ�е���Ԫ����ʾ����ά������������ӣ��ڼ���-����ģ���У����ڼ��⼡��ij��ȺͶ�Ա�̶���Ϊ���������Ȼ��ͨ������ʽ����ļ���ά������������Ա�̶Ⱥ���������ѧ��ͨ������Ķ�Ա-����-����-�ٶ������Լ�����ĵ������������以���ı�����������ά����ȷ��֮���ݸ�˹�����������ʾ��Ա����-���ȹ�ϵ�ļ���������
������֫�ͱ����ؽ��� 54 �鼡��-����� Hill ģ���������������ֱ�����������������������ÿ���������������ѧ���ݣ���ͨ��ģ�Ͱ��ձ����������ţ��������������ѧ��������Maker ��Ľ���ѧλ�ý��м��������������ģ�ͻ���ʾ����Ӧ Marker ���λ�ã������涯��ѧ�㷨������ؽڽǶ����ݣ��Ӷ���С������ÿһ֡Ӱ����ճ���� Marker ��λ����֮��Ӧ��ʵ�ʽ���ѧλ�õIJ��졣�ؽ�����ͨ�� RRA��residualreduction algorithm�� �㷨����õ���RRA �����ԹؽڽǶȣ�<1.5°�������������е㣨<5 cm������С�ĸı������������ڹ���IJ�����������ļ����������Ա�̶ȡ���������С��������Щ���صĽ����Opensim �У����� CMC��computed muscle control���㷨���㼡������
����1.4 ������ѧ�������
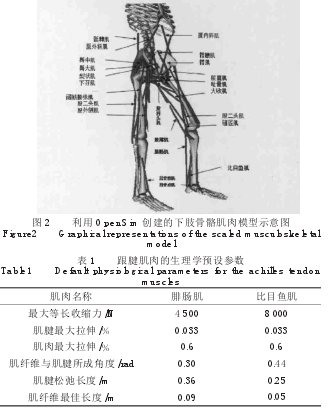
������1��ͨ����̬������ Marker ��λ�õ������������������������������Щ�������������֫������ѧģ�͡�ģ�Ͱ���������֫�ǵļ���-��������ѧ������ʹģ���������������ߵ������������ƥ�䣬ƥ�����֮�õ�һ���ض������߹���-����ģ�͡���ģ�Ͱ��������������ɡ����衢�ֹǡ��ɹǡ���Ǻ���Ľṹ���Լ��������ļ���-���쵥λ�ļ���ѧ�����������ά���Ⱥͼ����ɳڳ��ȣ������������˶�ѧ���㼡�⼡�쳤�Ⱥؽڵ��˶�ѧ���ݣ�������������еĹؽڽǶȺؽڵ�λ�ơ������˶�ѧ���ݡ�ģ�͵������������ֵ�Լ����淴��������ͨ������̨��ã������������̬ϵͳ�е��˶����̼�������ؽڵ��������ء���2��ͨ����̬�Ż��ķ�����һ������ؽ����غ�֧���ڵļ�����������ѧ���̼����Ϊ 2 �֣�������ǰ����ѧ���̺��涯��ѧ���� 2 �֣�OpenSim �����ļ�������涯��ѧ���̣����������вɼ������˶�ѧ������ѧ���ݵõ��ؽڽǶȡ����ؽ������3���ؽڽǶȺ͵��淴�����������ݽ��� RRA ���㣬�Ż������������ͨ�� CMC ���㣬�õ���ǰ����ѧ���̷���������ͼ 3����
�����Ż������У��������ǻ��ڸ����ļ�ֵ�������������ƣ����� 1������õ�������Ż�����ʹ���⼤����ƽ������С�������Ը���Ϊ�������ݶ��Ż����������⼤���ͼ��⼡�쳤�Ƚ��漡����ѧ��������������������������һ�����У�ÿ�����廷�ڱ�������һ�����壬���л������˶�������ʽ�������������ڸ������������ߡ����ء����ڳ��Ⱥ��Բ�����ͨ����ǰ���˶�ѧ�������̵õ��������Լ��ٶȡ����ٶȺͽǼ��ٶȣ�����ţ���˶�ѧ���̶Ի���ϵͳ���м��㡣
����
����ʽ�У�I Ϊ���ڹ��Ծ���a Ϊ���ļ��ٶȣ�ω Ϊ���ٶȣ�FD�� TDΪԶ�˹ؽڵ������������أ�Fp�� Tp�ǽ��˹ؽڵĹؽ������������أ�L �� Fp�����ĵ����ۣ�d �� FD�����ĵ����ۣ�W ������������ 3 ����������������ijһϵͳ��������ϵͳ�����õ���ϵͳ�����ı仯�ʣ������Ժͽ��ٶȵı仯�ʿ�ͨ���˶��������ݵõ�����Ϊ��������ѧ�����죬ͨ���ؽ��������ݼ���õ�ÿһ�鼡�������������ͨ��һ���������Ż��������õ��ģ����Ż�������һ��ָ���ķ��̺����������½��С�
����
����ʽ�У�α Ϊ�������������� n �������������еļ��⼤���ƽ���ͣ�n Ϊ�������ݵ�ĸ������Ż�������Ϊһ������ļ�Լ���Ʒ������Ż��������ɽ� α ��С����Ȼ����ļ����������⼡�쳤�ȵ����ݱ��������ѧģ���м��㼡��������
����1.5 ������ȷ����֤
��������������̽�������֤��������ȷ�ԡ��� Opensim��������˶�ѧ���ؽڽǶȣ��Ͷ���ѧ�����أ������ͬ������ά����������Vicon ϵͳ�е� Bodybuilder ������ ����Ľ����Աȣ�������һ�£���������ģ�ͺͷ������Ŀɿ��ԡ�
�����÷���������ĸ��������� LICHTWARK �� WILSON���о������һ�¡�LICHTWARK �����˶����ݺͳ���Ӱ���������ϵķ�����ʹ��һ�ּ� Hill ģ�����������������������ʾ���ܲ��и��������ķ�ֵԼΪ 3 300 N���뱾�о�������Ķ��ܸ����������������֮�⣬���о��������У������˶��賦�����Ŀ�㼡���Ա����Ľ��ͼ��������֮ǰ�о��ı��漡���źŽ����ͬ��
����2����������
����2.1 ������綯������������ȷ����֤
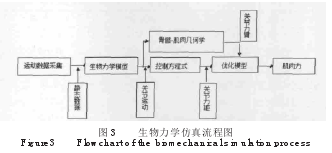
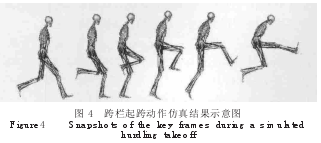
�����˶�Ա����ɿ�����綯��ʱ��������ڸ����ܶ������3 ���Σ����ŵػ��塢֧�ź͵�����أ���ͼ 4��������������������������ͬ��ʵ�˶�ѧӰ�������Բ��졣
����
������������ȷ����֤���ǽ��з����о��Ļ�����Ҳ�ǹؼ������⡣���ڼ����������ȷ����֤�ķ�����ͳһ�涨��Ŀǰ��û��ֱ�ӵķ�������������еļ�������С�����ڷ���ȷ�Ե���֤ͨ����ȡ 2 �ּ�ӵķ�������1����������������ݶԱ���֤��������ָ�����ڼ�������Ӧ�õ��ھ����أ����������еĹؽ��������������ݾ�����������õ��Ĺؽ�������Ƚϡ����о��У�Bodybuilder ������Ĺؽ�����ͬ OpenSim�õ������������Բ��졣��2�����ڱ��漡���źż������ڷ��淽���м��㼡������ȡ���ڼ���Ķ�Ա�̶ȣ������漡�缼������ֻ��ȡ��������Ķ�Ա����������ͨ�����Ա�̶���֤�Ƕ����о����õķ��������нϸߵ�ȷ�ԡ����о���Ҫ�漰�ı�Ŀ�㼡���賦���Ķ�Ա�����֮ǰ�о��е����ݽ����ȶԣ�ͼ�������ϸ߶����ơ�ͨ��������ݺͱ��漡���ź�������Ƚϵ���֤�������Եó������о���������ʵ�ɿ������о��Ͳο���ֵ��
����2.2 ����-���쵥λ����ij��ȱ仯
����������ճ������֯������ճ�������ʡ��������˶��У������ܹ����ܽ�ǿ���������������������������������ǣ������ؽ��˶���ͬʱ������Ҳ������֯���������ԣ��ܹ�Χ�ƹ�������Ե�ı伡������췽���������ڸ�����֯����Щ��е���ԣ����˶����ܹ����ܴܺ�������Է�ֹ��������������ˡ�
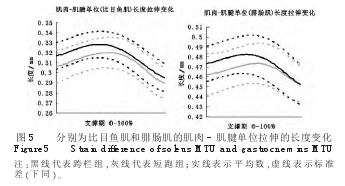
��������-���쵥λ��֯���˶�֧����ʱ�����ܽϴ��ǣ�����������ܴ��α䡣��1���賦������-���쵥λ���α�ϴ����˶��У��ӵ������ʱ��С�� 0.451 mm����֧�Ž��������ʱ�� 0.482 mm�����Ȳ���Ϊ 0.031�������У����ֵ����Сֵ�ֱ�Ϊ 0.468 mm��0.452 mm�����Ȳ���Ϊ 0.016��������֧���ڣ��賦������-���쵥λ�����������Ҫ�������ŵػ�����֧�ŽΣ��ڵŵؽο�ʼ���������٣���������ؽ�û�в��졣��2���ڿ����Ͷ��ܵ�֧���ڣ���Ŀ�㼡����-���쵥λ�����α�IJ��춼�Ƚ�����������ʱ�ij��ȷ�ֵ�ֱ�Ϊ 0.325 mm�� 0.294 mm�����Ȳ��� 0.031������ʱ�ij��ȷ�ֵΪ 0.318 mm�� 0.289 mm�����Ȳ��� 0.021���˶�֧���ڵ�����̶�����ֵ���������ŵػ��嵽֧�ŽΣ���ͼ 5����
����2.3 ���츺�ɵķ���
�������������֧���ڣ�С����ͷ������Ŀ�㼡���賦����ǣ�������ϴ��������������������죬���¸�����ܽϴ������������֧���ڱ�Ŀ�㼡��������ֵ��3 130.90 N��������֧�ź�ĵ����ʼ�Σ��������еı�Ŀ�㼡��������֧�Žε����ֵ��2 535.48 N�������ŵػ���Σ�����������б�Ŀ�㼡�������������������ƣ�����δ��ʾ�����ԵIJ��죬�����������ĵ�ǰ�ƽ���֧�ŽΣ�2 ���˶���ʽ�±�Ŀ�㼡���������ֲ�ͬ��ͬΪС����ͷ�����賦����������ֵ���ֵ�ʱ�����Ŀ�㼡ͬ������ֵ�ֱ�Ϊ 750.91 N �� 759.182 4 N���賦���������ڶ���֧���ڵķ�ֵ���ڿ���֧���ڡ�����֧���ڸ��������������ŵػ��������������ε����ֵ��3 850.40 N��������֧���ڣ���������������֧�Žε����ֵ��3 253.23 N������ͼ 6����

������������ʾ���ڿ����Ͷ����˶��У����Ӹ���� 2 �鼡�⣨�賦���ͱ�Ŀ�㼡�������˽ϴ�ļ��������Ӷ����¸���Ľϴɣ����Ǹ���Ľ���ѧ�ṹ�����ġ��������Ҫ�����ǽ���������������������ǴӶ������ؽ��˶��������������ݽ��ͼ����ʾ����֧���ڵĺ��Σ��賦���ͱ�Ŀ�㼡�����˷�ֵ��
����������Ϊ��������Σ��������������ڴ�ֱ��ˮƽ������ƶ���Ҫ�ؽڵ���������ɣ����ؽڵ�������Ⱥ���賦���ͱ�Ŀ�㼡����������ǰ�˶�����Ҫ�����ߡ��о���ʾ���ؽڵĿ���������ϥ�ؽڵ��������Ÿ���ij������ɣ��������¸���Ķ��ѡ������������˶���ȣ������ڿ������θ����׳����˶����ˡ�
�����о���ʾ���������˵Ļ���������������ȸ���ʱ�ܵ�������Ӱ�죬����������������ʱ�����˳̶ȱ��������������ʺ����ȵĴ�С������������һ�����ܺʹ��ܵĵ��Խṹ�������������Ļ�е���ԣ����Գ��ܾ��ǣ���������Ժ�������һ�μ�����Ϳ���ʹ������ѡ���ˣ�����������һ�������������������GALLOWAY ����Ϊ������Ĺ��ȸ��ɵ��¹���ʹ���˲����������¸���Ķ��ѣ�����“����ʹ�������Ǹ�����ѵ�����”��һ���۵õ���������֤��KANNUS �ȵ��о����֣�97%���ѵĸ�����ʾ���˻��������������Ӷ���һ��֧�ֹ��ȸ����������ѵĹ�ϵ�����о����֧�ָý��ۣ��̿��˶�Ա�����˲��ʽϸߣ�������ڴ��´����˶�ʱ�߸����µĹ���ʹ��������ء���������ʾ�����������֧���ڳ����žɣ����˶�Ա����ѵ����������������
����2.4 ���淽�������Է���
����������������ǿ׳�ļ���֮һ����������˶�������أ�������������������ʹ��ɣ����ڸ��츺�ɵ��о��ܵ�����ļ������ơ�
����VAN DEN BOGERT �ȵ��о��ǻ���һ�����ֻ�ģ�ͣ�����ģ�͵��ŵ����ڼ���ʵ�֣��������ַ����ľ������ں����˸��챾������Ľṹ�����ͻ�е���ԣ��о������ȷ�ԺͿɿ����д���ǿ�����⣬���ֽ��������ּ����ģ�ͣ��������˶��о�Ӧ���ж��ڲ�ͬ�о�����ȱ������ԣ��Ӷ�����о�����IJ�ȷ�����ַ���Ŀǰ�Ѿ�����Ӧ���ڸ�����о���
����LEWIS�� KOMI�ȵ��о�������������ֲ����ѧ��������������츺�ɴ�С��������������ķ�������һ�ֿ�ʽ������ֲ������С�ȸ��촦������һ�λָ��ڣ���������Ӧ��������ʼ���飬���������������������̬�����ܡ���Ծ���ĸ������������о���Ӧ����ʬ������õ��ĸ����쳤������������������������˶��е�Ӧ�����ߺ�Ӧ�����ߡ�KOMI �������У����ܵĸ��������ߴ� 9 000 N��Լ 8~12.5 �������������������������鷽������ 2 �����⡣��1������������ֲ�봫�������������������������˺���ֲ�����������ڷ��գ����������������д���֤�������Ļָ��ڶ����谭���ַ������ƹ㡣��Ա��ĵ��о�������������ˮƽ�˶�Ա�����ܲ������������������о���ͬʱ�����ַ���Ҳ����Ϊ��Υ���������µġ���2�����ݴ�ʬ������õ����������Ӧ��ʱ�����ݺ����뼡�����Ӵ��ĺ��������㣬�������˶��еĸ��ɵķ�ΧΪ 1 200~2 000 N����Ȼ��ѧ������������������һ������Υ�����ɿ����д���֤��
����LICHTWARK���ó�����Ӱ�����о��������˶��еĸ��ɣ����쳤�ȶ���Ϊ����Ƕ�봦������������Ӵ����������ֻ�Ӱ���٣�Marker���볬����Ӱ���������ϵļ������õ��������˶��г�������ı仯���������ݸ�����������г�����Ӧ���仯���ߣ��ó��������˶��еĸ��ɴ�С������Ϊʵ���������·�����ж������ó������쳤�븺�ɵı仯���ߡ��ŵ��ǣ����������û���˺�����ȫϵ���ϸߣ���������Ӱ������Ӧ�ã�ȷ�õ��˸������˶��г��ȵı仯�����о���������ʱ��ָ���ֵ�ϸߣ�ͬʱ���÷��������˸����е�����е�ճ�����ص㣬�������������ݵĿɿ��ԡ����ǣ����ַ���Ҳ����һ���ľ����ԡ���1������ Marker �ٵķ���������Ϊ Marker ��Ƥ���ϵ��ƶ������������ڸ���Ļ�е���ԣ���һ������������ս����������Ӱ�죻��2�����ڳ�����Ӱ�������о���Χ��Ӧ��������ļ������粽̬��ԭ����Ծ�����ܵȲ����ر���ҵĶ����������ַ������Ӧ���ھ����˶��еĸ���������ɣ����ܻ���Ϊ�����豸�ľ��������������ң������ද�����о�Ŀǰ��δ���С�
����3���� ��
������1�������и����о�������ȣ�OpenSim ��ѧ���淽���ڽ�ģ�ͼ��������㷽������Ƚ���������Ҳ�Ƚ�ȷ�����⣬���ַ����������߱���û���κ��˺����������������ݲɼ��ʹ���������ӷ��㡢���У�OpenSim �Ŀ�Դ��ҲΪ���������о��ṩ�˼���ı�����
������2������-���쵥λ�ڿ����˶�ʱ�ȶ����˶�����������α����죬�����Բ��춼�������ŵػ���Σ��Ӷ����¸����ڿ����˶��бȶ����˶��ܵ������ǣ��������ֵ���ֵ�ʱ���в��죬����֧���ڱȿ���֧���ڳ��ַ�ֵ��ʱ����磬����֧�ź��ڸ��������ﵽ��ֵ��ͬ������ȣ������������˵ķ��ո��ߣ������ײ����˲���
�����ܶ���֮��Ŀǰ���о��ṩ���µķ����������˶��еĸ��츺�ɣ�ʹ�õ�ģ�Ͳ��������ڼ�������ܵ���ǣ������ͬ��Ҳ���Ա��������������������������������ģ�Ϳ��������о��������˶���ص����ˣ�����Ϊ�˲���Ԥ���ṩ��ѧ���ݡ����⣬�ڷ������Ļ���֮�ϣ�����Ա�����Դ�Ϊ��ѧ���ݸĽ�ѵ��������������Եؽ�����Ӧ�ļ���������Э���Եȷ���ļ�ǿ��Ϊ�˶����˵�Ԥ���춨������
�����ο����ף�
����[1] ������.�����˶���������ѧ��ģ���������淢չ[J].ҽ��������ѧ��2011��26��2����97-103.
����[2] HAMILTON B��REMEDIOS D��LOOSEMORE M��et al. Achilles tendonrupture in an elite athlete following multiple injection therapies [J].J SciMed Sport��2008��11��6����566-573.
����[3] AMES P R ��LONGO U G ��DENARO V��et al. Achilles tendon problems��not just an orthopaedic issue [J].Disabil Rehabil��2008��30��20-22����1646-1650.
����[4] DELP S L��ANDERSON F C��ARNOLDA S��et al.OpenSim��Open-sourceSoftware to Create and Analyze Dynamic Simulations of Movement [C].IEEE Trans��Biomed Eng��2007.
����[5] DELP S L��LOAN J P.A graphics-based software system to develop andanalyze models of musculoskeletal structures [J].Comput Biol Med��1995��25��1����21-34.
����[6] THELEN D G.Adjustment of muscle mechanics model parameters tosimulate dynamic contractions in older adults [J]. J Biomech Eng��2003��125��1����70-76.
����[7] KUO A D.A least-squares estimation approach to improving the precisionof inverse dynamics computations [J]. Journal of BiomechanicalEngineering��1998��120��148-159.
����[8] THELEN D G��ANDERSON F C. Using computed muscle control togenerate forward dynamic simulations of human walking from experimentaldata[J].Journal of Biomechanics��2006��39��1107-1115.
����[9] LICHTWARK G A��WILSON A M. A modified Hill muscle model thatpredicts muscle power output and efficiency during sinusoidal lengthchanges[J]. J Exp.Biol��2005��208��2831-2843.
����[10] MAGNUSSON S P��KJAER M. Region-specific differences in Achillestendon cross-sectional area in runners and non-runners [J].Eur J ApplPhysiol��2003��90��5-6����549-563.
����[11] HAMNER S R��SETH A��DELP S L.Muscle contributions topropulsion and support during running [J].J biomechanics��2010��43��14����2709-2725.
����[12] GALLOWAY M T��JOKL P��DAYTON O W. Achilles tendon overuseinjuries[J].Clin. Sports Med��1992��11��4����771-853.
����[13] KANNUS P��J��ZSA L. Histopathological changes preceding spontaneousrupture of a tendon. A controlled study of 891 patients [J]. J Bone JointSurg. Am��1991��73��10����1507-1531.
����[14] VAN DEN BOGERT A J. Computer simulation of locomotion in the horse[D]. Utrecht��University of Utrecht��1989.
����[15] LEWIS J L��LEW W D��SCHMIDT J.A note on the application andevaluation of the buckle transducer for the knee ligament forcemeasurement [J].Journal of Biomechanical Engineering��1982��104��2����125-128.
����[16] KOMI P V��SALONEN M��J�RVINEN M��et al.In vivo registration ofAchilles tendon forces in man I Methodological development [J].International Journal of Sports Medicine��1987��8��1��3-8.
����[17] LOUIS-UGBO J��LEESON B��HUTTON W C.Tensile properties of freshhuman calcaneal Achilles tendons[J].Clin Anat��2004��17��1����30-34.
����[18] MAGNUSSON S P��KJAER M.Region-specific differences in Achillestendon cross-sectional area in runners and non-runners [J].Eur J ApplPhysiol��2003��90��5-6����549-53.
����[19] LICHTWARK G A��WILSON A M.Optimal muscle fascicle length andtendon stiffness for maximising gastrocnemius efficiency during humanwalking and running[J].J Theor Biol��2008��252��4����662-731.





