摘要:太极拳的架位影响膝关节稳定的主要因素, 文章以膝关节角为依据, 测量了一名中等身高男性太极拳练习者的高低架位, 并对其进行不同膝关节角、左脚支撑力的力学分析。研究发现:当太极拳习练者处于小腿与地面垂直的弓步过渡到膝尖与脚尖的垂直状态, 人体的重心自然会补偿性前移而降低, 同时通过髌腱的股四头肌力矩也减少。研究提示: (1) 当膝关节尖靠近脚尖的垂直状态, 由于通过髌腱的股四头肌力矩减小, 可能导致膝关节稳定性的减小。 (2) 简化太极拳所谓的“无过无不及”的膝尖与脚尖的关系的科学性值得重新思考。
关键词:太极拳; 膝关节角; 弓步;
1 引言
太极拳在长期的演变中, 形成了五大流派。杨式太极拳为了适应宫廷的需求, 在陈式太极拳的基础上, 不但提高了拳架的高度, 同时也改变了太极拳的发力。因此, 我们所见到的不同流派的太极拳, 在外形上有的看似蹲着打的、有的看似站着打的, 有的发力短促迅猛、有的则注重绵柔划弧。但各流派几乎都十分注重底盘 (腿部) 的动作, 并且有严格的要求。简化太极拳虽然是从杨式太极拳改创而来, 但与传统的杨式太极拳却有不同的腿部动作要求。如, 传统的杨式太极拳弓步的要求是:“两脚前后分开, 前腿屈, 小腿与地面垂直, 后腿舒展蹬地, 不可绷直。”[1]而从传统杨式改创而来简化太极拳则是, “前弓的膝盖垂直方向下对脚尖, 无过无不及。”[2]这就给太极拳练习带来一个实践问题:从平衡或稳定性的角度出发, 是传统杨式太极拳的“小腿与地面垂直”有利于稳定, 还是简化太极拳的“无过无不及”的有利于下肢的稳定呢?不论是何种流派的太极拳, 弓步是最典型的步形。因此, 膝关节角通常被研究者所采用, 相关研究已经建立膝关节角与太极拳架位的关系。目前对太极拳的架位定性有两种方法, 第一种是膝关节角度法, 第二种是人体重心法。两种方法将太极拳的架位又分为高架、中架、低架。第一种运用关节运动角度 (ROM:range of motion) 又将太极拳架位分为:高、低、中三种及和高、低两种架位。陈文鹤、赵釜生认为, 太极拳所指的架位, 即所提到的太极拳的高势、低势和中势, 一般也都可以用膝关节角度来大致划分。[3]陈文鹤教授在他的研究中将太极拳高架势时膝关节角度定义为150°, 而低架势则定在120°, 把专业太极拳运动员低架势的临界膝关节角度135° (中间值) 确定为中架势膝关节角度。[4]也有研究者将太极拳架位分为两种, 高架:膝关节角度为110°~130°;低架:膝关节角度为90°~110°[5]第二种运用人体重心法。研究中规定的高、中、低身体架势以正常人体站立时重心为标准, 然后分别乘以系数0.97、0.89和0.81作为高、中、低架势的重心高度。要求练习太极拳时重心起伏不能太大, 尽量控制在规定的重心高度范围之内。[6]上述关于下关节角的表述存在错误, 本研究通过更正后选取膝关节角作为测试指标。
本研究对一名太极拳习练者的高架位和低架位的“小腿垂直地面”以及“膝尖垂直脚尖的状态”作了膝关节角度和支撑力的测量。通过力学分析, 计算各架位通过髌腱的股四头肌肉力矩的变化, 来说明弯曲腿膝关节的稳定性。
2 测量对象与测量设计
2.1 测量对象
Yan, Yu-meng, 男, 24岁, 身高168cm, 体重58.1kg (上身穿衣服, 下身仅穿内裤) .在读民族传统专业研究生, 有多年太极拳习练及比赛经历。
2.2 测量设计
2.2.1 测量工具
电子秤一台, V1Golf (版本1.01.49) ©2016Interactive Frontiers, Inc.Plymouth, Michigan, USA, 米尺一根。
2.2.2 参照标准
本文采用杨慧馨, 虞定海等将高架:膝关节角度为110°~130°;低架:膝关节角度为90°~110°的标准作为参照并调整。因为研究者对膝关节角表述存在错误, 因此根据膝关节角的概念, 在胫股关节中, 运动是发生在三个平面上的, 但是在失状面的运动范围显然是最大的。这个平面膝完全伸展到完全屈曲的运动范围是0°到140°。[7]陈文鹤教授等将太极拳高架势时膝关节角度定义为150°, 显然是膝关节角难以达到的角度 (受伤病例除外) .因此, 校正并调整为高架≤80°, 低架>80°且小于140°。
2.2.3 测量设计
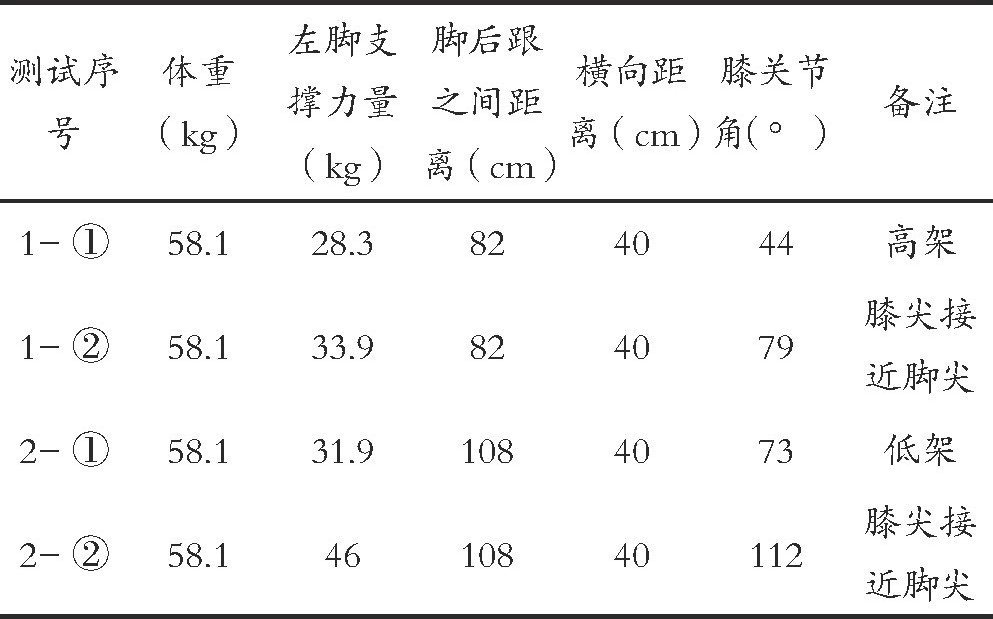
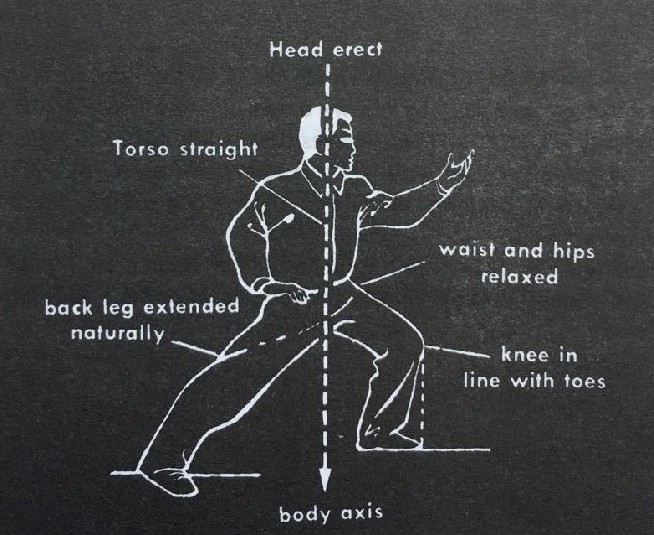
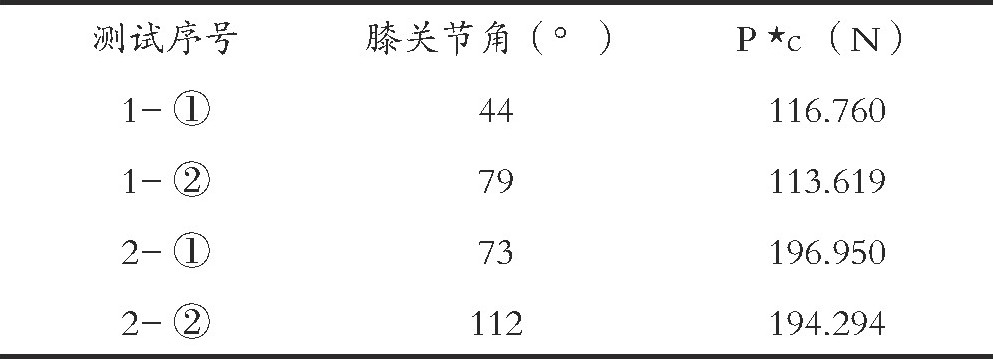
(1) 标志关节部位。在左脚踝关节外踝、膝关节中心、股骨上端凸起用膏药贴上标记。 (2) 固定两脚后跟的距离。目的是:形成一个小腿几近垂直地面的弓步, 就是取传统杨式太极拳弓步弯曲腿要求;继而膝关节尖逐渐靠近脚尖, 并形成脚尖与膝尖的连线垂直于地面, 测试过程选取一垂直的墙面做参照。此时形成的弓步就是简化太极拳的弓步要求 (见图1) . (3) 预测试。选取一个中等身高的男性, 进行数次测试, 目的在于, 编写记录单、调整摄像的位置, 两脚确定在统一水平面上, 并按要求完成需要测量的动作。 (4) 实际测量。形成弓步, 固定架位, 两脚后跟高架位距离为82cm、108cm, 分别测量高架位小腿基本与地面垂直时的弯曲腿支撑力 (记为w1) 和膝关节角 (序号记为1- (1) ) , 移动膝关节尖几近垂直脚尖 (序号记为1- (2) ) ;测量弯曲腿大腿几近与地面水平, 小腿与地面垂直状态的弯曲腿支撑力和膝关节角 (序号记为2- (1) ) , 移动膝关节尖几近垂直脚尖 (序号记为2- (2) )
图片来源:国家体育总局编。简化太极拳[M].中国体育杂志英文编辑部译。北京:人民体育出版社, 1998.10:11.
3 结果与分析
3.1 从高架位移动至低架位的力学分析
3.1.1 膝关节角度的测量
在任何一平面都可以测量一个关节的运动范围。粗略的测量用量角仪就可以完成, 但更为精确的测量则要求运用诸如电子量角仪、X线片、立体摄影测量或运用骨针的摄影和摄像这些更加精确的方法。在胫股关节中, 运动是发生在三个平面上的, 但是在失状面的运动范围显然是最大的。[8]
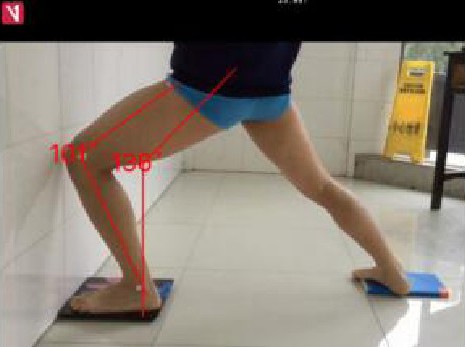
运用V1Golf做标志关节点的连线, 并形成如下图2和图3所示的角度, 根据膝关节角的概念, 容易得到不同架位的膝关节角度, 如图2的膝关节角度=180°-136°=44°。
3.1.2重力力矩
弓步的重力力矩是相对力的支点而言的。太极拳的弓步重力的力矩, 以右脚为支点做顺时针旋转, 就是人体重力与后脚支点的垂直距离, 本研究记作b, 反之, 记作a.
如果顺时针旋转 (顺时针的力矩为正) , 此时右脚后跟为支点 (o) , 人体处于静态平衡状态, 膝关节角=44°。假设人体重心投射与两脚后跟连接的线段点为o', o‘与左脚脚后跟的长度为a, 与右脚的脚后跟长度为b.支撑左脚的力量记为w1, 支撑右脚的力量为w2, 人体重力为G, 重力加速度为g, 根据力矩平衡∑M=0, 可知,
联立 (1) 、 (2) 得到:
计算得出b=28.3*0.82/58.1=0.399 (米) , a=0.82-0.399=0.421 (米)
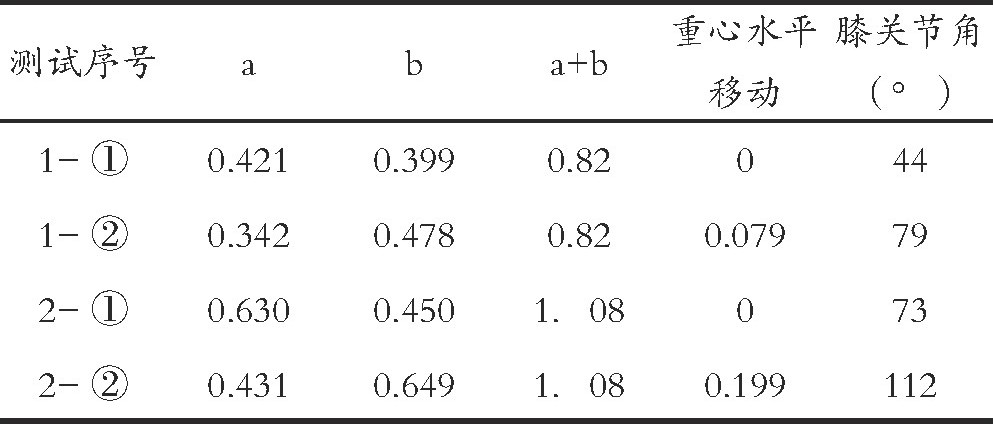
同理依次计算出1- (2) 、2- (1) 、2- (2) a与b的长度, 见表2
从表2可以看出, 当膝关节角为44°移动到79°, 即由高架的小腿垂直状态移动到膝尖与脚尖垂直的低架状态, 人体重心与左脚后跟的垂直力矩从0.421m减小到0.342m.从人体的外在形态来看, 这个过程一是, 身体重心的下降, 二是左脚的支撑力量变大 (见表1) .
3.2 分析通过髌腱的股四头肌肉肌力P和它的杠杆c的乘积
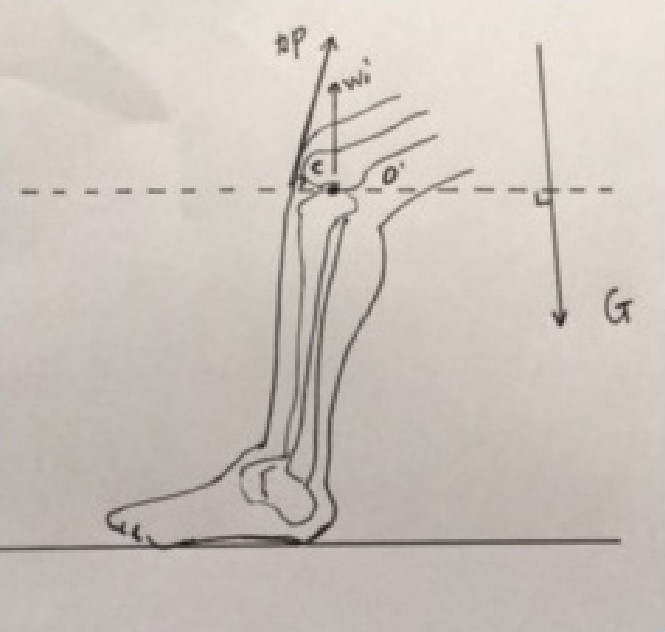
小腿的屈曲力矩是体重 (G) , 因为弓步是两腿支撑地面, 即左脚的地面反作用力) 和它的杠杆臂a的乘积。a是w1到胫骨关节运动中心的垂直距离, 因为太极拳的弓步是两腿支撑地面, 因此, 此时的a就是人体重心投射点与左脚脚后跟的距离。与之抗衡的伸展力矩是通过髌腱的股四头肌肌力 (P) 和它的杠杆臂 (c) 的乘积。w1’下肢骨对股骨的支撑力, 几近通过胫骨平台的支撑点 (o‘) , 此时大腿要保持平衡状态, 主要来自通过髌腱的股四头肌的拉力 (P) 和人体的重力 (G) .
大腿处于平衡状态或膝关节要维持稳定, 与重力抗衡时伸展肌肉力矩 (通过髌腱的股四头肌肉肌力P和它的杠杆c的乘积) 与重力形成的力矩也必然相等 (∑M=0) .股骨髁以胫骨平台做屈伸运动, 因此存在一个关节中心点, 我们不需要知道中心点具体的位置, 也可以计算通过髌腱股四头肌肌力P和它的杠杆c的力矩。由于小腿的重量小于体重的10%, 在此忽略小腿的重量。
P*c与身体重力抗衡的力矩, c:股骨杠杆力臂
w为向下的重力, 由于右脚支撑力向上, 因此可初略认为此时向下的重力为:
联立 (4) 和 (5) 得出
通过计算得出, 髌腱的股四头肌肉肌力P和它的杠杆c的乘积 (力矩) 见表3.
从表3来看, 股四头肌的力矩1- (1) 到1- (2) 呈现减少。这种减少, 一方面人体重力的代偿性分布决定的, 即人体要维持一定的平衡状态, 人体的重心必须作出及时的调整。膝关节的受力与胫骨所处的角度关系很大, 在一般情况, 小腿角度改变1°, 即可使膝关节移动近1cm.[9]本研究中被测试者的脚长40cm, 在膝尖移动至与脚尖垂直的状态, 实际上移动了脚背到脚尖的长度, 脚踝与脚后跟的距离接近8到10cm.从1- (1) 到1- (2) 的膝关节移动了79-44=35°。可见大体与前人的研究相符合。
结合表2, 我们以1- (1) 过渡到1- (2) 的重力力臂变化, 和通过髌腱的股四头肌力矩来看, 都是一个减小的过程。力臂的减小是人体维持身体平衡的代偿性机能, 而力矩的减小则说明, 膝关节的稳定性减少。这与我们平时见到的, 由于膝关节病变原因或腿力量 (主要是股四头肌) 的力量不够, 引起屈膝前跪而摔倒紧密相关。这也许是人体的一种自我保护机制, 即保护膝关节不受伤, 而做出摔倒的动作。在传统的杨式太极拳基础上创编的简化太极拳, 要做到“无过无不及”的膝尖与脚尖的垂直的状态实际是有难度的, 大多简化太极拳初学者, “过”是常态。我们可以将这种“过”的状态称之为“跪膝”, 这也是太极拳初学者最容易出现的问题。
4 结论与建议
4.1 结论
(1) 膝尖靠近脚尖的垂直状态, 通过髌腱的股四头肌肉肌力P和它的杠杆c的乘积力矩减小;
(2) 身体重心投射与左脚的力矩减小, 膝关节的稳定性减小, 不利于稳定性支撑。
4.2 建议
(1) 建议太极拳初学者, 不要去追求“无过无不及”的状态, 而要注意小腿与地面大体垂直。
(2) 本案例仅为一名被测试者, 膝关节的力学分析与不同性别、体重、身高、腿长等都有紧密联系, 为提高简化太极拳的健身的科学性, 样本可增加不同身高。
参考文献
[1]国家体育总局武术研究院组编。杨式太极拳[M].北京:高等教育出版社, 2009:8-9.
[2]薛安日。简化太极拳学问不简--纪念《简化太极拳》问世50周年[J].中华养生保健, 2006 (04) :10-11.
[3]陈文鹤, 赵釜生。太极拳练习的能量消耗和甲皱微循环变化[J].上海体育学院学报, 1984 (2) :1-7.
[4]周雷, 王健, 吴飞, 等。太极拳3种高度架势的确定及控制[J].中国体育科技。2005 (3) :103-104.
[5]杨慧馨, 虞定海, 赵影。中老年男性太极拳高、低架野马分鬃、倒卷肱与云手练习中的气体代谢和能量消耗特征[J].中国运动医学杂志, 2011 (04) :323-325.
[6]周雷, 王健, 吴飞。高、中、低架势太极拳运动的气体代谢反应[J].中国运动医学杂志, 2007 (02) :211-213.
[7]邝适存, 郭霞主, 译。肌肉骨骼系统基础生物力学[M].北京:人民卫生出版社, 2008:117.
[8]邝适存, 郭霞主, 译。肌肉骨骼系统基础生物力学[M].北京:人民卫生出版社, 2008:117.
[9]戴尅戎。关节的力和力矩[J].国外医学·创伤与外科基本问题分册, 1981 (01) :35-39.