引言
我国辣椒的总产量居世界之首,年产量达 2 800万 t 多,约为世界辣椒产量的 46% ,同时每年还以 9%的速度增长,辣椒去核是辣椒进行深加工前的一个重要工序,目前国内辣椒产品的加工大多采用手工去核,费工又费时。个别企业开始使用一种辊子式的辣椒去核机械,通过两个辊子相对转动将辣椒压破,达到辣椒核与辣椒肉的分离; 但用这种方法去核对辣椒肉的伤害比较大,且辣椒肉与辣椒籽混在一块,不利于辣椒丝和辣椒片的制作。
本文所介绍的辣椒去核机是通过一种间歇式的链条输送机构配合其他机构共同作用,实现辣椒核与辣椒肉的有效分离,并且在加工过程中辣椒肉受到的伤害较小。间歇式链条输送机构是辣椒去核机的重要组成部分,本文着重介绍该辣椒去核机间歇式输送机构的设计,并应用 RecurDyn 软件对输送机构的链轮和链条进行了动态仿真,得到主要工作部件的运动动态特性曲线,并对机构的干涉情况进行检查,从而为该机构的设计提供必要的参考。
1 间歇式输送机构的设计和工作原理
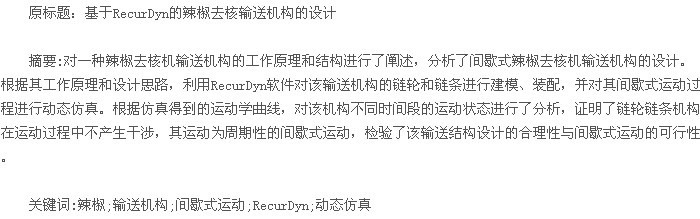
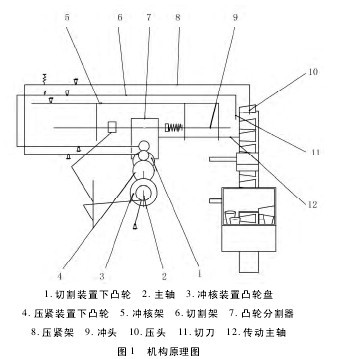
图 1 为辣椒去核机的原理结构图,图 2 为输送机构原理图。工作时,动力由电机输入到凸轮分割器,凸轮分割器上装有两个输出轴,分别为传动主轴和主轴; 传动主轴连接主动链轮,通过传输链条带动中从动链轮和左从动链轮做间歇转动; 整个链条每间隔一个链节的附板上都安装有盛放辣椒的锥形槽,主轴上固定有压紧装置下凸轮、切割装置下凸轮及冲核装置凸轮盘,3 个凸轮分别驱动压紧架、切割架和冲头运动,使辣椒压头、切刀、辣椒冲头到达预定位置。为使辣椒在压紧和冲核时链条的波动性较小,在链条下方设置支撑板。由于主动链轮与左从动链轮之间的中心距较大,在输送过程中链条可能会出现跳齿或者波动较大的现象,在下边链条靠近左从动链轮处设置张紧轮,以使链条传动更加平稳。【图1-2】
当主动链轮驱动链条运动时,辣椒从料斗落入锥心槽中,并随之移动,多余的辣椒会被定位板阻挡于输送途中,从而实现了辣椒的排队和上料。辣椒输送过程与去核的过程都是以 6 个辣椒为一个单元。主动链轮和中从动链轮之间的链条上方为辣椒的加工位置。辣椒随锥形槽移动到加工位置时,主动链轮停止驱动链条,此时辣椒上压头落下,夹紧辣椒; 然后辣椒切刀下落,将露在锥形槽外端的辣椒尖部切掉,完成切割后,切刀立即回到原位; 在切刀离开工作位置后,辣椒冲头开始做往复直线运动,并将辣椒核冲掉,待辣椒冲头和上压头都退回原位,主动链轮继续驱动链条移动,锥形槽内已去核的辣椒被移出加工位置,未去核的辣椒再次经排队、上料,随锥形槽进入加工位置。如此循环往复,利用输送机构的周期性间歇运动,实现辣椒的去核。
2 关键参数的确定
2. 1 输送机构的工作参数
首先,初步给定凸轮分割器输出到主轴的转速为30r / min; 然后,根据凸轮连杆部分的仿真结果,并充分考虑装置的压紧、切割、冲核过程所用时间,确定了凸轮分割器驱动链轮做间歇式转动的工作周期为 1. 3s。其中,6 个辣椒输送到工作位置的时间为 0. 4s,间歇时间为 0. 9s。
2. 2 输送链条的参数
根据辣椒的尺寸选择链条型号,锥形槽中间直径约比被加工最大辣椒的中间直径( 平均中径) 大 2 ~3mm。同时,还必须考虑锥形槽与链条附板的安装结构,初步确定链条的节距,根据下式进行计算,即【1】

其中,P 为链条的节距; D中= 30 为被加工辣椒的中间直径,mm。可选择 10A 型带附板滚子链,此时节距 P=15. 875。
2. 3 链轮的设计
由于辣椒间歇式输送装置每周期中运动的时间为 0. 4s,在此时间内输送链条需走过 6 个锥形槽的距离 L( L =362. 5mm) ,可知链条为低速运行,所以由机械设计手册可确定小链轮的齿数 z小= 19。由于传动比在 3 左右时,链条传动时不易出现跳齿和脱齿现象,所以选用大链轮齿数为 z大= 60。此时,大小链轮传动比 i= z大/ z小≈3. 16。中间链轮仅起使加工位置的锥形槽处于水平状态的支撑作用,所以选用 z中=31。根据各个链轮齿数和链条的节距,可以算得各链轮的分度圆直径,即【2】
根据链条在 0. 4s 运动的距离,可以计算出大链轮转动的角度为 144°。
3 柔性体三维模型的建立与仿真分析
3. 1 软件介绍
RecurDyn 软件是由韩国 FunctionBay 公司开发的新一代多体系统动力学仿真软件,适合求解大规模的多体动力学问题,且有专门用于解决链传动问题的子模块。所以,本文采用 RecurDyn 软件进行三维建模与仿真。
3. 2 柔性体三维模型的建立
在 RecurDyn 软件的 Chain 子模块中,按照 ISO606 标准选择型号为 10A 的滚子链。其中,滚子、套筒、链板等零件的尺寸系统自动按标准算出,按此参数生成链节的三维模型。由已知的链轮齿数和链条型号,根据 ISO 606 标准系统自动计算出链轮分度圆直径、齿宽、链轮宽度等尺寸,然后即可生成链轮三维模型。
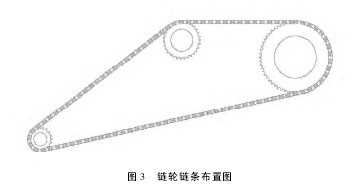
图 3 为链条与链轮的装配及布置图。为使每组 6个辣椒在加工时完全位于主动链轮与中间链轮之间,主动链轮与中从动链轮之间的水平距离按照排放 8个辣椒锥形槽所需链条的长度来确定。综合考虑料斗与定位板的尺寸后,中间链轮与左从动链轮之间的距离按着排放 10 辣椒锥心槽所需链条的长度来确定; 然后,通过 Chain Assemble 命令对链条和链轮进行装配,该装配过程由软件链条子系统自动完成; 系统装配完之后,若发现齿轮与链条没有正确啮合,此时必须通过 RecurDyn 中 Object Control 命令来旋转相关链轮,使链条与所有链轮恰好啮合。【图3】
3. 3 动态仿真与分析
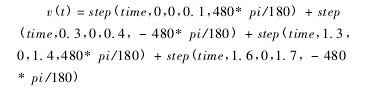
为了加快计算机求解速度,取辣椒输送机构中单排链条和链轮在运动的前两个周期进行仿真。由于凸轮分割器中凸轮曲线用变梯形曲线,所以此处可用step 阶跃函数来对链轮角速度进行仿真。在 3 个链轮中心全部添加旋转副,然后在主动链轮的旋转副上添加角速度驱动,令驱动函数为【公式】
因为研究输送过程中的平稳性,关注的重点是处于链条水平位置的部分,所以取靠近中从动链轮的链节作为研究对象。该链节编号为 160,可通过此链节观察链条在仿真的周期内的运动特性。设置仿真结束时间 2. 6s,仿真步数为 150,进行仿真,结果如图 4所示。【图4】
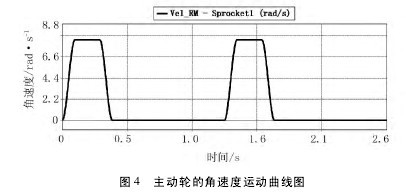
由图 4 可知,链轮带动链条做间歇式的周期运动。在一个周期开始的 0 ~ 0. 1s 间,主动轮角速度从零逐渐增大,然后趋于恒定。之后,再以恒定角速度运行 0. 2s。在 0. 3 ~0. 4s 间,主动轮角速度速度又逐渐减小到 0。此运动时间内,该输送装置要实现辣椒的排队和上料的工序,同时把冲核完成的辣椒运送到工作位置外。在 0. 4 ~ 1. 3s 间,链条和链轮处于静止阶段,此时处于加工位置的辣椒需要完成压紧、切尖和去核的工序,之后进入下一个周期。图 5 为主动轮角加速度和角位移的运动曲线。其中,粗实线为主动轮角位移曲线,细实线为主动轮角加速度曲线。在主动轮角速度增大和减小的时候( 见图 4) ,其角加速度都是先增大然后再减小为零;当主动轮角速度为匀速时,其角加速度为零,而其角位移一直处于增大阶段。在第 2 周期时,由于角位移增大到 π,所以在运动曲线上的角位移突变到-π,继续按原方式计算,确保系统中角位移曲线能表达在-π~ π 之间。在运动结束后,可以观察到每周个期主动链轮转过的角位移为 144°,符合链条设计时所要求运动的距离。【图5】
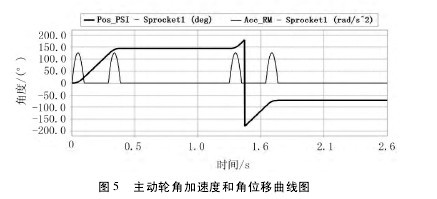
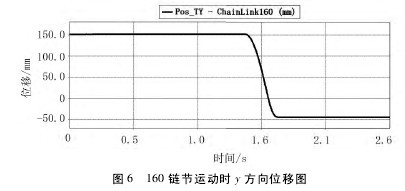
图 6 为编号 160 的链节在链轮转动时 y 方向上的振动位移图,可以用来观察链条和链轮在运动过程中的稳定性。由于该链节处于整个链条上部分的水平一段,所以当链轮转动时,该链节随着链条水平运动,同时会产生 y 方向上的振动。由该位移图可知: 此链节在水平运动时其 y 方向上振动的最大位移与最小位移之差为 2mm,相对于主动链轮与中从动链轮的中心距离要小很多,所以整个链条在输送过程中的运动比较平稳。在 1. 3 ~ 1. 7s 时,该链节转过链轮,所以运动曲线出现了下滑; 在 1. 7 ~ 2. 6s 时,主动链轮静止,该链节不再运动,所以运动曲线为水平直线。
由上述链条链轮结构的仿真结果可知,该链条链轮结构的设计与实际要求链条链轮的工作情况相符。在运动过程中,链条与链轮的啮合不会产生干涉,可以实现平稳的间歇式运动,满足设计要求。【图6】
4 结论
1) 由模拟仿真可知,所选型号的链条与相对位置确定的各链轮在装配时不产生干涉,盛放辣椒的锥形槽在转过链轮位置时不会出现相互干涉,并且各个零件的设计尺寸在大小上能够匹配,验证了该结构在设计上的合理性。
2) 由链轮转动过程中链条的模拟动画可知,链轮和链条的运动比较平稳,并得到该机构任意时刻链轮与链节运动学、动力学曲线,从而确定了该结构可以实现预定的间歇式运动,理论上验证了该结构在运动上的可行性。
3) 该机构的设计与仿真和实际情况比较一致。
链条链轮间歇运动的间歇时间与对辣椒的压紧、切尖和冲核各阶段所需时间相匹配。在实际生产中,可通过选用不同型号的伺服电机或凸轮分度器来改变主轴和传动主轴的转速,从而实现不同的高速间歇输送,满足不同生产率的需求。
参考文献:
[1] 邹高峰. 早春辣椒育苗与高产栽培技术[J]. 辣椒杂志,2012( 2) : 30-32.
[2] 唐文波,王春耀,郭亚平. 辣椒定向去核机凸轮机构的设计[J]. 机械设计与制造,2013,7( 7) : 28-30.
[3] 陈鹏飞. 弧面分度凸轮机构虚拟样机技术研究[J]. 中国高新技术企业,2012( 30) : 16-17.
[4] 陶学恒,肖正扬. 分度凸轮机构装置的虚拟制造技术研究与开发[J]. 机械科学与技术,2002( 6) : 91-93.
[5] 吴宗泽. 机械设计师手册[K]. 北京: 机械工业出版社,2012: 114.





