含取种播种装置的马铃薯播种施肥联合作业机械设计
时间:2014-09-09 来源:未知 作者:学术堂 本文字数:2564字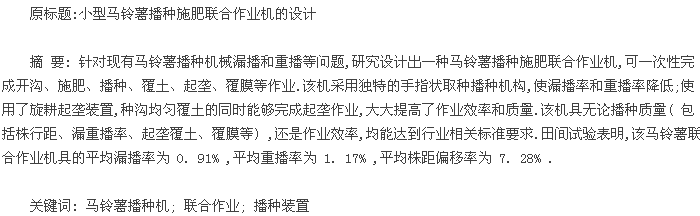
0 引言
马铃薯的播种环节作为其整个栽培环节中的重要部分之一,不仅劳动强度大,而且播种时间紧、农艺要求高,其播种质量的好坏将直接影响马铃薯产量的高低.马铃薯机械化播种集开沟、施肥、播种、覆土、起垄等作业于一体,是一种综合性的种植方式.与传统作业相比,采用机械化播种可使出苗早 3 ~ 5 天,苗多、苗齐,具有抗旱、保墒、省工、节肥的作用; 同时,播种深浅一致、株行距均匀、作业质量和效率高; 后期植株生长壮,抗病能力强,大薯率高,为马铃薯中耕和收获等田间作业实现机械化提供了可靠保证.
近年来,随着马铃薯产业结构的调整和种植规模的不断扩大,我国已成为世界上最大的马铃薯种植国和产出国,种植面积占世界的 1/4,产量占世界的 1/5.但国内对马铃薯播种机械的研制比较晚,发展较慢,机型较少,适应性差,充种率低、漏播率和重播率高、补种难一直是马铃薯机械化播种的瓶颈.为此,研制了一种带有新型取种播种装置的马铃薯播种施肥联合作业机械.
1 整机结构与工作原理
该机具采用三点悬挂方式,与 14. 7 ~ 25. 7kW 四轮拖拉机相配套,主要包括机架、地轮、开沟器、施肥装置、播种装置、起垄覆土装置及覆膜装置等,一次性完成开沟、施肥、播种、起垄覆土、覆膜、膜上覆土等作业.整机结构紧凑,布局合理,适合大垄双行种植模式,株行距可调,施肥量可调,播种装置独特,漏播率和重播率低,对中小地块的田间作业适应性强.
播种机的整体结构如图 1 所示.工作过程为: 拖拉机牵引播种机前进,地轮旋转提供的动力通过链传动传递给施肥装置和播种装置,将肥料和种薯投放在开沟器开出的种沟内,随后由起垄覆土装置完成种沟覆土作业.其中,起垄覆土装置动力由拖拉机动力输出轴提供,通过万向节经变速箱带动进行旋耕起垄.覆土之后,依次由覆膜装置、覆土装置完成垄上覆膜、膜上覆土等工序.
作业前,根据种植区域的农艺要求调整机具.调整地轮距以满足不同垄距要求,垄距范围为 85 ~120cm; 调整开沟器以满足开沟深度要求,开沟深度范围为 8 ~ 15cm; 调整升运链横向距离以调节行距,行距在 24 ~28cm 之间.在株距调节塔形轮上选取合适的链轮作为动力输出链轮,与播种传动轴上的驱动链轮配合使用实现株距调节.有 4 种株距可供选择:20、25、30、35cm.起垄高度可调节,最大 25cm.覆膜宽度 80 ~95cm.
2 主要零部件设计
2. 1 排种装置
排种部件是马铃薯播种机研制的关键,其设计的合理与否将影响到作业质量的好坏,会对马铃薯的产量造成影响.当 1 块或多块种薯进入到排种部件时,通过一定技术手段有效剔除多余种薯,实现马铃薯的单块精密播种,降低漏播率和重播率,是播种机械研制的核心问题.
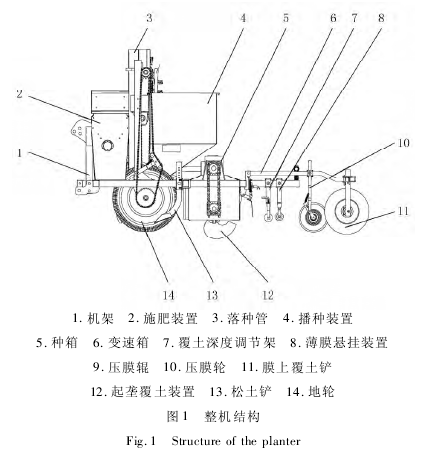
该播种机排种装置在目前使用较广泛的链勺式排种结构基础上进行了创新,如图 2 所示.受仿生学的启发,模仿人的手指并拢抓取物体及物体可以透过指缝或者受到手指的挤压而掉落的过程,机具采用了指状取种勺结构.排种装置具体工作过程如图 3 所示.
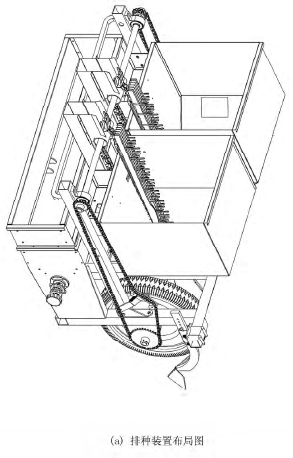
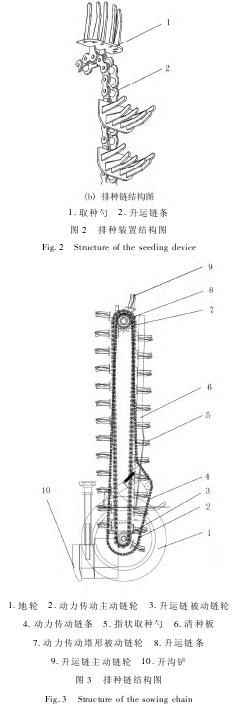
工作时,地轮提供的动力通过动力传动链条传递给升运链动力轴,升运链动力轴上安装有动力传动塔形被动链轮和升运链主动链轮; 动力轴带动升运链主动链轮转动,通过升运链条将动力传递给升运链被动链轮,带动升运链被动链轮转动; 升运链条装配有指状取种勺并绕升运链主动链轮和被动链轮做回转运动; 指状取种勺随升运链上升,经过种箱时舀取至少 1块种薯; 继续上升过程中,安装在每两个取种指之间的清种隔板对种块施加推力作用,外侧隔板最先发挥作用,将种块向取种勺中间推动,随后内侧隔板依次发挥作用,最后将多余的种块推出取种勺,实现清种目的,达到精播要求.
2. 2 施肥装置
施肥装置主要包括肥箱、排肥器和导肥管等,其动力由地轮通过链传动提供.肥箱安装在排种装置前方,排肥器使用外槽轮排肥器,排出的肥料通过导肥管落在开沟器开出的沟内.施肥深度可以通过调节开沟铲的开沟深度实现,施肥量的大小通过排肥槽轮工作长度控制.
2. 3 起垄覆土装置
马铃薯播种机对覆土装置的要求是覆土深度一致、覆土严密,覆土时不改变种子在种沟内的位置.本设计中采用特殊结构的旋耕刀,旋耕刀动力由拖拉机动力输出轴带动的变速箱经链传动提供.作业时,旋耕刀将大块土壤打碎,通过高速旋转的离心作用将碎土均匀覆盖在种块上,同时旋耕刀开出垄沟,一次性完成起垄覆土作业.该起垄覆土装置能够满足不同地势、不同土壤条件的地块作业要求.
2. 4 覆膜装置
马铃薯采用垄上覆膜种植模式,能够提高地温,增强保水能力,促进增产增收,对干旱地区具有重要的经济意义.该机具的覆膜装置可拆卸,能够灵活适应不同种植模式的要求.覆膜装置主要包括薄膜悬挂架、压膜辊、压膜轮和覆土铲等.悬挂架宽度可以调节,以适应不同覆膜宽度作业要求,覆膜宽度范围80 ~ 95cm.
3 田间试验研究
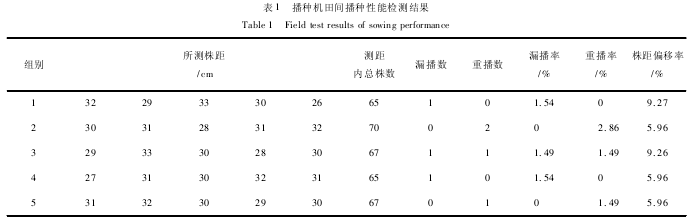
样机田间试验选在胶州市胶莱镇大赵家村进行.试验前,土壤已经旋耕机旋耕,湿度条件适中,无杂草,试验面积 667m2.根据当地马铃薯种植模式,试验前通过塔形链轮的组合将株距调节为 30cm,垄距调节为 85cm,开沟深度设置为 12cm.随后,在试验区内进行了株距检测,每次试验测量距离选为 20m,并在测距内选取 5 株进行测量.田间试验测试数据如表 1所示.
4 结论
1) 所设计的马铃薯播种施肥联合作业机具,结构布局紧凑合理,能够一次性完成开沟、施肥、播种、起垄、覆土、覆膜等田间作业,操作方便,作业灵活.设计的指状取种播种装置结构独特,作业性能好,漏重播率低,不需要人工补种,大大节省了人力,提高了生产效率.
2) 根据田间生产试验检测数据,该马铃薯联合作业机具的平均漏播率为 0. 91% ,平均重 播 率 为1. 17% ,平均株距偏移率为 7. 28% ,满足行业相关标准要求.
参考文献:
[1] 王丽,孙秀俊,王忠伟. 我国马铃薯机械化种植的现状及前景分析[J]. 农业科技与信息,2011( 23) : 52.
[2] 杨文勇. 马铃薯机械化生产技术研究[J]. 农业科技推广,2008( 5) : 39.
[3] 杜宏伟,尚书旗,杨然兵,等. 我国马铃薯机械化播种排种技术研究与分析[J]. 农机化研究,2011,33( 2) : 214-217.
[4] 刘汉武,杨德秋,贾静霞. 马铃薯全程机械化生产技术[M]. 北京: 中国科学技术出版社,2010: 1-22.
[5] 李宝筏. 农业机械学[M]. 北京: 中国农业出版社,2005: 66-68.
[6] 张兰珍,张玲. 2CM 一 2 型马铃薯播种机[J]. 农村牧区机械化,2011( 4) : 42-43.
[7] 杨德秋,郝新明,李建东,等. 四行悬挂式马铃薯种植机虚拟设计与试验[J]. 农机化研究,2009,31( 10) : 75-78.
[8] 高波,王昕玮,李洋,等. 1 220B 型宽垄双行马铃薯联合作业机的研制[J]. 农机化研究,2013,35( 3) : 121-125.
- 相关内容推荐
- 国内外翻转犁研究及发展现状2014-10-13
- 农田灌溉的自航式农用输水泵船的技术改造2015-01-22
- 大马力精播机的田间无线调度系统设计2014-09-10
- 小区播种机作业图自动生成软件设计2014-09-09
- 利用ANASYS分析秸秆的压缩过程2014-09-10
- 农业无人机技术在国内外的应用现状2014-11-27
- 国内外穴盘育苗精密播种机研究现状及原理分析2015-04-13
- 微耕机在我国西南地区应用的阻碍因素及解决措施2014-09-12
- 上一篇:小区播种机作业图自动生成软件设计
- 下一篇:穴盘苗取苗机构设计与运动仿真





