����0 ����
�����������������ģ�������Ҫ������ʵ��������ij������е�ģ������Ҫ���ǵľ���������ӵ�ս��˼�����Ա�����˼������Ϊ���������������“����”�ľ���ϵͳ�ĸ���������Ǹ��ݱ������ϵ�ʵ��������������˵���һ������Ϊ�������ߣ��������˾��ǰ��ոþ��������������Դ˴ﵽ���յķ��ػ��߽����÷ֵ�Ŀ�ģ�����ʵ�ֶ���ʵ��Ա���ģ��ͷ��档�ܴ�̶��Ͼ����˶���ʵ������������е�ģ��ͷ���Ŀɿ��̶ȡ������������������������о���Խ��٣��������������������ϵͳ�о�������֮���٣�����˶Աȵľ��ǶԻ������������������о���Խ϶࣬����ͨ������Ի�������������о��бȽϳ���ľ��飬��Ƴ���Ϊ�����ģ�͡�
����Ϊ�˽����������������о���ϵͳ�������������������ϵͳ�������ڵ�ȱ�ݣ����������һϵ�е�ȫ�¾��ߵ�����������ͨ���þ�������ָ�������˵Ķ�����
����Ϊ�˼���ϵͳ����ƣ��Դ˽�����Ա֮�����϶ȣ������еľ���ϵͳ����������Ա�Ľ�ɫ��ֻ��������10 ����Ա�������ߣ������� 10 ����Ա�Ľ�ɫ���ǹ̶�����ģ�ÿ����Աӵ����������Ľ�ɫ���Լ�ѡ���������г���ǰ�����ֽ�ɫ�����Ҷ���ȷ�������µ���Ա֮�����γɵ�Э����ϵҲ�ǹ̶�����ġ�
����1 ���Կ�
���������������������ϵͳ�ľ��߿���Ҫ�������֣���ȫ�ֲ��Կ������Կ⡣
����1.1 ȫ�ֲ��Կ� ȫ�ֲ�����Ϊ��ӵ�“����”����������ӵ����ͺ�ս��ս���ܹ���Э�������á���ȫ�ֲ��Կ��������ڵ�һЩ��Ϣ�������Գ�Ϊ����ϵͳ��������ʱ���ο������ݡ����У����ر�λ����Ҫ����ijһ������ÿ����Ա�ķ�������������½��С�
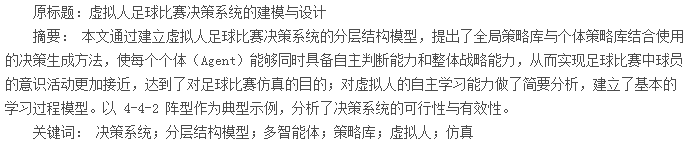
����1.2 ������Կ� ������߿��Ǹ��ݽ�ɫ�ƶ��ģ���ͬ�Ľ�ɫӦ�����Ų�ͬ�ĸ�����Կ⡣��Ϊ������ɫ֮���ս���������Ҳ�Dz�һ���ģ������� 4-4-2 �����У���Ա֮���Э����ϵ��ͼ 1 ��ʾ��
���������������������ѿ������Բ�ͬ����Ա��ȡ��ͬ�ĸ�����Կ��Ǻ��б�Ҫ�ġ�ÿ��������߿��д洢������Ա��ɫ��صĸ�����Ϣ�������еľ���ϵͳ����ӵ� 10����Ա������������Ա�����ֱ��� 10 ����ͬ�ĸ�����Կ⡣
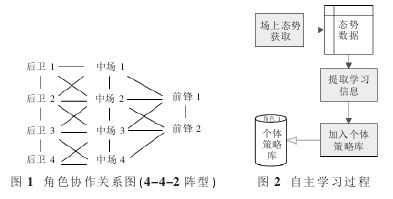
��������ÿ����Ա����һ�������������壨Agent������������ѧϰ�������������߿�������ʱ������ƶ��仯�ġ���Ա�����ѧϰ������ͼ 2 ��ʾ��
����
�������������������ͬ��ʵ�������һ�������ϵ����˲Ϣ��䣬���۸��ӡ�Ϊ���������ָ��ӻ�������������������Ա�Ķ������ߣ����Խ������������������ص���ԸĽ�����ͼ 3 ��ʾ��
��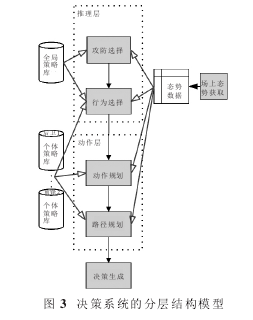
�����ڸþ���ϵͳ�ֲ�ṹģ���У��������߹��̷�Ϊ���㣬�ֱ���������Ͷ����㡣����������֮ǰ���Ȼ�ȡ�������ϵ�̬�����ݡ����У���ѡ����ʱ��Ҫ����ȫ�ֲ��Կ��̬�����ݵ�ʵ������Է��ػ��߽�������ѡ��
����2 �����������������ϵͳ�����
������������������ķֲ�ṹģ�ͣ��Ըþ���ϵͳ��������£�
����2.1 ����ѡ�� ����ѡ����Ҫ��Ϊ��ȷ����ӵ���������ǽ������Ƿ��ء�ÿһλ��Ա���嶼����������е�һ���ӣ����DZ���������ӵ�����ս�ԣ���Ϊÿһ�������������Ա�Ľ������Զ�����ͬ�ġ���ˣ���ѡ����ʱ��Ҫ����ȫ�ֲ��Կ���е�ǰ��ʽ�ķ����������ػ�����������������������ָ�����ߡ�
��������ѡ��Ĺ���������£�IF ��������THEN ѡ���������ELSE IF �Է�����THEN ѡ����ز���ELSE ���������˶�״̬IF ���һ�εĿ����Ǽ���THEN ѡ���������ELSE ���һ�εĿ����ǶԷ�THEN ѡ����ز���2.2 ��Ϊѡ�� �ڹ���ѡ��ȷ���˷��ؽ�������֮���Ը��ݾ���Ĺ�������ѡ��������Ϊ������˵��һ�����ֵĸ��
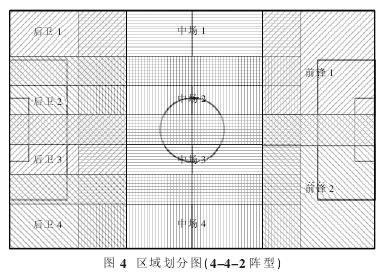
������ȫ�ֲ��Կ��д洢��ijһ�����µ�����ͼ����ͼ 4 ��ʾΪ 4-4-2 �����µ�����ͼ��ͨ�����ַ����ķ���������ȷ��ÿ����Ա���������Χ����Ϊ���������������ص����ص����������ΪЭ������������Ա֮����ں�����ϵ�����ص�ʱ�����ǿ��Ը��ݳ���̬�ƽ���Э����������ʱ�����ǿ��Ը��ݳ���̬�ƽ��д�������ϡ�
��
����2.2.1 ���ز��� ���ڷ��ز��ԣ���Ҫ��Ŀ�ľ����赲�Ͷ������ѡ����λĿ�꣬�����Ե����λ�ٶȣ����Ե���Ϊ��Ҫ�ˡ�
�������ݳ���̬�����ݺ�ȫ�ֲ��Կ��е����֣���������Ա�ľ����ɫ�������и�����Կ��м������Ա�ķ�����λ���ߡ��ü������������£�IF ���ڸ������������IF �Է���Ա����THEN �ֲ���λ���˷���ELSE �Է���Ա�����������THEN ��������˶��켣��λ����ELSE ���ڸ������������IF ��������������Է���ԱIF ���ڶ�����ҪЭ��THEN ѡ��һ�����ڶ��ѽ���Э����λ�������ǹ�ͬ��Э��������λ��ELSE ���ڶ��Ѳ���ҪЭ��THEN ���ز�����λ�����������з��ر�λ����λ��ELSE IF �������������� 1 ���Է���ԱTHEN �ֲ���λ���˷���ELSE �������������ж���Է���ԱTHEN ѡ����в������뼺������������ĶԷ���Ա���ֲ���
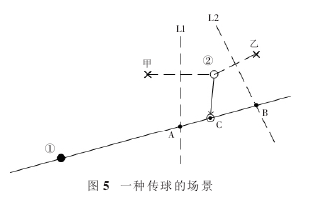
������λ���˷���2.2.2 �������� ���ڽ������Զ��ԣ�����Ҫ��Ŀ�ľ�����Ա��δ��Է����½������ŵ÷֣����ѡ�����ķ�����ٶ���ʮ���б�Ҫ�ġ������Ը��ݳ��ϵľ�����ʽ��ȫ�ֵIJ��Կ������е����֣��Գ���ÿλ��Ա�ľ����ɫ���н������߷������������Ľ�ɫ��ǰ�棬��ü������������£�IF ���岻�dz�����ԱTHEN ����������λ��������������Է����Ž�����Ա�ֲ�ϡ��λ����λ��LESE �����dz�����ԱIF ����ϵ�����ڻ������ֵ����ֵ��Ϊ�ж��Ƿ�������ŵı���THEN ѡ������ELSE ����ϵ��С����ֵIF ����Σ�ճ̶ȸߣ�Σ�ճ̶�����Ա������Χijһ��Χ�ĶԷ���Ա����������THEN ѡ��һ�����ڶ��Ѵ���ELSE ����Σ�ճ̶ȵ�THEN �������λ�����2.3 �����滮 Ϊ��ȷ����Ա֮��ľ�����Ϊ������Ҫ������Ա�Ľ�ɫ�����ж�Ӧ�ĸ�����Կ���ѡ����ʵIJ��ԣ��ڶ����滮��Ϊ��Ա�ľ�����Ϊѡ����ʵ���Ϊ�淶�����ڷ��ز����е���λ������Ҫ��ȷ����λ������λ�ٶȣ����ڽ��������е����ţ�����Ҫȷ�����ŷ����߳���ij��ٶȣ����ڽ����еĴ�������Ҫȷ����λĿ�꣨���Ե㣩��������Ե�ʱ���ٶȵȵȡ������ڽ����еĴ�����Ҫȷ������������ٶȣ���Ϊ��Ҫ����ѹ�ͬ�������ɴ������Ŀ�ģ����ȷ��������ʹ�����ٶȱȽϸ��ӡ�������ʹ��һ�ֽ�Ϊ���Ĵ������滮���ԣ�������ͼ 5 ��ʾ��һ�ֵĵ��͵Ĵ���������������£�
��
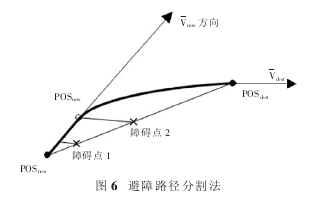
����2.4 ·���滮 ���ڸ���ɭ������������[5]�ļ�������С�����ԣ�������ʹ�õ��Ǹ���ɭ��������������Ϊ·�����ߵģ����м��㸥��ɭ����������������IJ����������˵㼰����ʸ���ֱ��� p��0����p��1����-p��0����-p��1����ʾ�������ֱ���·���ָ����ͼ 6 ��ʾ��
����3 ������
����Ϊ������������������������Ե�Ҫ�����ڻ������������ϵͳ�Ļ����ϣ������ȫ�ֲ��Կ��������Կ�����ʹ�õľ������ɷ������Դ˽�����������������ľ���ϵͳ�ķֲ�ṹģ�ͣ������� 4-4-2 �������˸���ε���ƹ��̡�����ϵͳ�ĸ�������ѧϰ�Ĺ�����ƻ��д����ƣ��⽫����һ���Ĺ����ص㡣
�����ο����ף�
����[1]�Է������������.���ڷֲ�ṹģ�͵Ļ������������ϵͳ���[J].��������ҵ��ѧѧ����2005��37��7����933-935.
����[2]���躮��������������.���ڽ�ɫ�� RoboCup �������[J].�����������Ӧ�ã�2004��26��66-67.
����[3]Qi Zhang, Yiming Yang, Ying Li. A Multi-agent CooperativeSystem of Soccer Robot [C]. Proceedings of the 4th World Congresson Intelligent Control and Automation.Shanghai, P.R.China:June10-14, 2002: 510-514.
����[4]����.�ִ������������̽��[J].���������Ƽ���2004��26��4��.
����[5]�ΰ������F�����ڲ�����ȫʤ������.����������������ƽ̨�ĸĽ�[J].��������ҵ��ѧѧ����2003��09��.
����[6]��˫���ŷ�����ӱ������֣꣬���ڣ����ı룬�����.��������Ϊ�������ܻ�̽��[J].ϵͳ����ѧ����2002��09��.
����[7]�ܳɲ�.�������������ϵͳ���о�[D].�Ĵ���ѧ��2005.
����[8]�������������ѧ��.��������Ľ�ɫ��ṹ��Ʒ���[J].����������뷢չ��2006��07��73-75.
����[9]ʩ����.������������������Ǿ������� B ������CAGD& NURBS��[M].�������������պ����ѧ�����磬1994��56-65.
����[10]������������ë�¾�����ꪣ����β�.���ڽ�ɫ�Ķ� Agentϵͳ������Ʒ���[J].�����������Ӧ�ã�2004��06��118-120.





