本篇为 机电工程师论文(精品范文8篇)之第七篇,文末可查看其他7篇文章
摘要:为提高农机设备研究工作中机械、电子、液压联合仿真的效率, 分析了AMESim及Simulink外部接口的特点, 提出了一种对复杂系统的机械系统、液压系统以及控制策略进行联合仿真的技术方案, 并通过了仿真验证, 为农机设备研发过程中机电液系统的联合仿真提供了一种解决方案。
关键词:AMESim; Simulink; 联合仿真; 主动悬架;
引言
十三五规划明确提出, 我国将全面推进农业现代化, 提高农业技术装备和信息化水平, 因此, 农业装备的现代化是实现我国农业现代化的重要保障。随着电子技术的发展, 特别是微控制技术、物联网技术和信息技术的飞速发展, 智能控制技术与传统的机械技术的结合越来越紧密, 农业机械也由传统的液压传动技术为主转向机电液一体化方向发展, 进而实现农业机械的自动化、网络化和智能化。
现代农机设备越来越趋向于机电液集成化, 与之对应的仿真技术也朝着机电液联合仿真的方向发展。本文在对AMESim和Simulink的特性及其外部接口进行深入研究分析后, 提出了一种对复杂系统的机械系统、液压系统以及控制策略进行联合仿真的技术方案[1,2].
1、AMESim与MATLAB/Simulink的联合仿真接口
AMESim在机械系统以及液压系统仿真方面有着突出的优势, 随着机器设备自动化程度的提高, 各种控制算法、控制策略被越来越多的应用于其控制系统中。因此, 在系统仿真时, 往往希望能对整个系统的机械、液压、控制算法进行联合的仿真, 对系统的整体性能进行研究、分析。然而, 目前来看AMESim只提供了非常简单的几种控制算法模型, 无法满足越来越复杂的算法仿真要求。而Simulink在逻辑运算、算法建模方面有着显着的成就, 因此, 将AMESim与Simulink联合起来, 取长补短, 在机械、液压及其控制系统的仿真中将取得单个软件难以比拟的效果[3].
AMESim与Simulink的联合仿真有2种实现方式:在AMESim中搭建机械、液压系统模型, 经过AMES-im的仿真参数设置及编译, 生成能在Simulink中调用的S-Function, 在Simulink环境中完成控制算法模型搭建, 然后像调用普通S-Function一样将在AMESim生成的机械、液压系统模型S-Function调入到Simulink中, 从而完成整个仿真系统的搭建, 仿真运行于Simulink环境之中, 使用Simulink的求解器进行计算仿真;在Simulink环境中完成控制算法的设计, 通过编译后调用由MTALAB提供的SL2AME函数, 将在Simulink环境中完成的控制算法转换为能在AMESim中调用的用户自定义元件模型, 在AMESim中, 将机械、液压系统模型搭建后, 像使用普通元件模型一样调用由SL2AME函数生成的控制算法元件模型, 完整的仿真系统搭建完毕后, 在AMESim中运行仿真运算[3].
笔者通过2种联合方式实验的对比发现:在机械及液压系统规模较小、元件不多的情况下, 2种联合仿真方式没有明显的差异;若机械及液压系统组成较复杂、元件比较多, 则采用第1种方式仿真时, 会出现仿真速度特别慢, 甚至于出现计算机死机的现象, 此时采用第2种方式, 即, 将在Simulink中生成的控制算法模型导入到AMESim中运行时, 仿真能达到比较满意的效果。基于以上对比分析, 本文将阐述第2种联合仿真方案 (下文称作SL2AME方式) 的具体实施步骤。
为实现AMESim与Simulink的联合仿真, 除正确安装好AMESim、MATLAB/Simulink外, 还需要做以下准备:
由于SL2AME接口是将在实时工作空间中的Simulink模型转换为能在AMESim中执行的C代码, 需要确保计算机系统中安装有Microsoft Visual C++.
设置MATLAB, AMESim环境变量:
a) MSSDK C:\Program Files\Microsoft Visual Studio.
b) MATLAB C:\MATLAB\R2008a.
c) Path加上;C:\WINDOWS\system32.
MATLAB设置:
d) MATLAB命令里运行mex-setup安装VC++编译器。
e) 在Matlab路径设置里添加:%AME%\scripting\matlab\amesim;%AME%\interfaces\.
f) sl2ame (%AME%代表计算机中安装AMESim的路径) .
在AMESim中, 将Microsoft Visual C++设置为当前编译器 (Options menu/AMESim Preferences/Compilation/Parameters) .
至此, AMESim与Simulink的联合仿真接口设置已全部完成。接下来, 本文以主动悬架系统仿真为例, 说明联合仿真的步骤并验证此方案的可行性。
2、联合仿真模型的建立
主动悬架不仅能较大程度隔离因路面不平导致的车身振动, 而且能通过自身的主动输出对车身姿态进行调节, 甚至在恶劣的路况、剧变的车速等特殊工况下, 仍能使车辆保持良好的平顺性和安全性[4].
在进行主动悬架相关技术研究时, 在动力学分析时常采用2自由度的1/4车体模型、4自由度的半车模型或7自由度的整车模型进行动力学建模, 如若要对车辆俯仰、侧倾以及垂直跳动等运动姿态控制和整车控制效果进行全面研究, 一般采用7自由度的整车模型进行动力学建模分析, 本文的联合仿真即基于整车主动悬架控制来进行的[5,6].
整车主动悬架机电液联合仿真平台包括3部分:悬架机械结构、液压系统及控制策略。机械系统及液压系统的仿真模型在AMESim中建立, 控制算法模型在Simulink环境中建立。
2.1 AMESim中主动悬架机械结构的建立
为方便研究, 在进行主动悬架系统研究时, 将主动悬架的机构简化为簧上车体质量、车轮及簧下质量、悬架弹簧、阻尼器、液压缸。
2.1.1 轮胎模型
根据悬架数学模型, 将轮胎模型简化成为质量、刚度和阻尼的系统, 在AMESim利用组件建立的轮胎模型如图1所示。
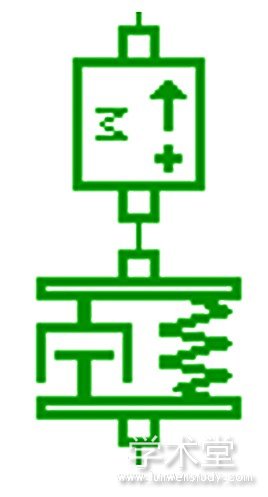
图1 轮胎模型
2.1.2 悬架模型
本文所述主动悬架采用被动减震机构与主动液压缸并联的形式, 即由弹簧、阻尼器以及液压缸并联而成, 在AMESim利用组件建立的悬架模型如图2所示。
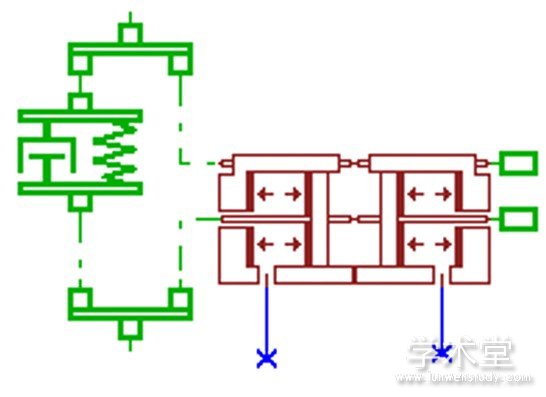
图2 悬架模型
2.1.3 车身
一般来说, AMESim的机械结构模型常用于一维机械结构仿真, 在进行整车主动悬架研究时需要对车体的三维姿态进行调控, 因此本文根据整车动力学模型建立了针对整车主动悬架研究和控制的仿真模型 (如图4所示机械机构部分) , 该模型可以输出车身侧倾角及其角加速度、车身质心垂向位移及其加速度、车身俯仰角及其角加速度等车身姿态数据[7,8].
2.2 AMESim中液压系统仿真模型的建立
本文主动悬架结构上采用的是在被动独立悬架上并联一个输出主动控制力的液压缸, 其优点在于能在主动与被动模式之间切换, 当主动控制系统损坏时, 悬架系统能工作在被动模式。根据此思路, 在AMES-im中建立主动悬架的液压系统仿真模型, 整车主动悬架液压系统原理如图4液压机构部分所示。
2.3 Simulink中控制策略模型的建立
主动悬架的控制核心在于控制策略的设计, 为验证本文的联合仿真平台的可行性, 本文的整车主动悬架控制采用基于模糊自整定参数PID的大系统分散控制策略, 由于主动架控制的算法不是本文的研究内容, 所以在此不作详述。
在Simulink中搭建的控制器如图3所示, 由于Simulink中没有现成的分散变换以及参数校正模块, 所以模块中编写了3个S函数完成整车悬架控制悬。
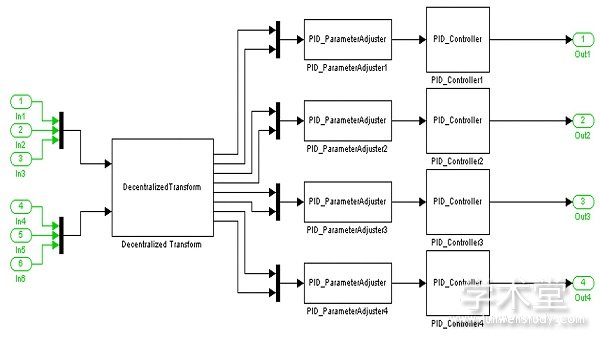
图3 整车主动悬架控制策略仿真模型
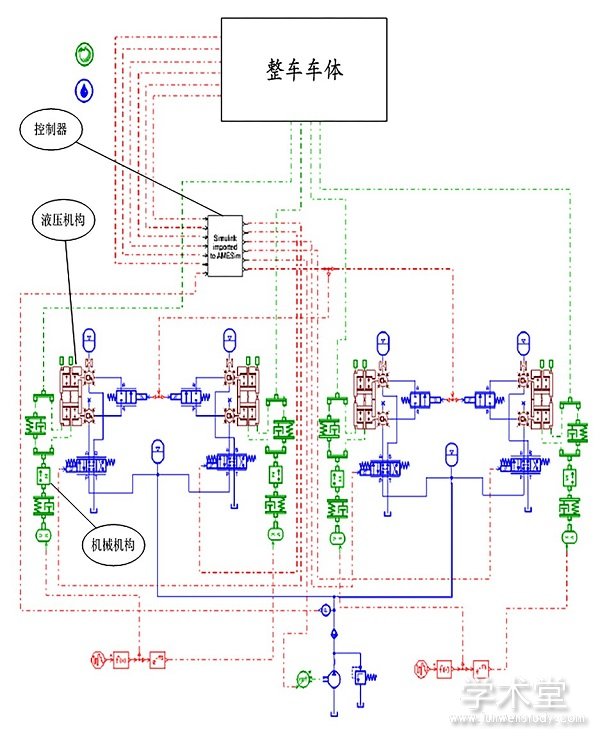
图4 整车主动悬架联合仿真平台
该仿真模型中, “DecentralizedTransform”为分散变换器, 用于整车姿态及振动数据的分散变换, “Fuzzy_ParameterAdjuster”和“PID_Controller”2个模块组成子系统控制器, 即模糊自整定参数PID控制器。
2.4 机电液联合仿真平台的搭建
在完成了基于AMESim的主动悬架机械、液压系统的设计和基于Simulink的整车主动悬架控制器的设计之后, 接下来就需要完成整车液压主动悬架系统仿真平台的联合。
如前文所述, 本文采用SL2AME的方式进行联合仿真, 即在Simulink环境中完成主动悬架基于模糊自整定参数PID的大系统分散控制策略的设计, 通过编译后调用由MTALAB提供的SL2AME函数, 将该控制算法转换为能在AMESim中调用的用户自定义元件模型, 在AMESim中, 将主动悬架机械、液压系统模型搭建后, 调用由SL2AME函数生成的上述控制算法元件模型, 完成联合仿真平台的搭建, 之后的联合仿真在AMESim中运行[3].
3、联合仿真验证
本文采用理想光滑包块路面在模糊自整定参数PID控制器控制下对悬架系统进行仿真, 以验证联合仿真平台的可行性, 仿真时, 在AMESim中设置仿真时间为10s, 步长为0.001s, 车速为20m/s.
包块路面输入产生一个高度为10cm的光滑凸起包块, 路面曲线如图5所示。主动悬架研究中常用包块路面分析主动悬架对路面障碍物的适应性能及抖动收敛性能。
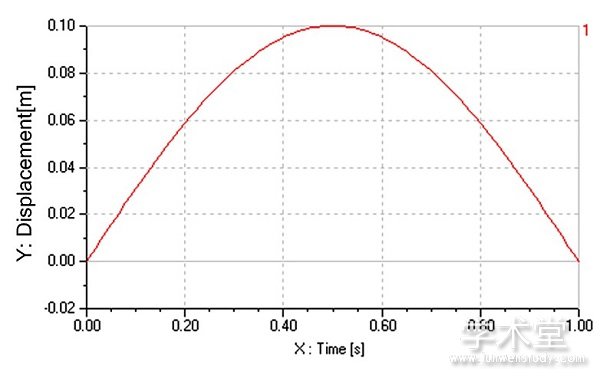
图5 包块路面输入
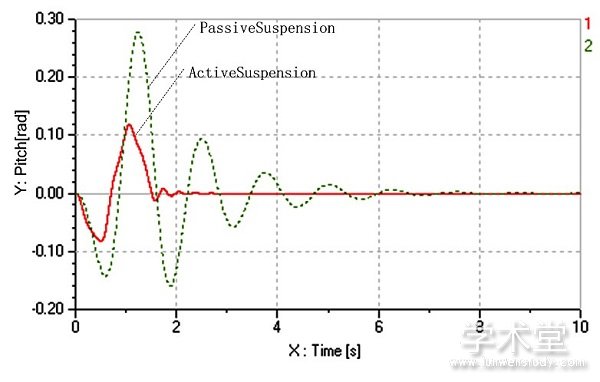
图6 包块路面输入俯仰振动曲线对比
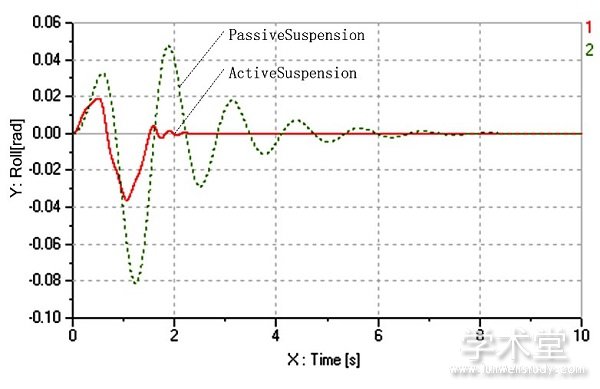
图7 包块路面输入侧倾振动曲线对比
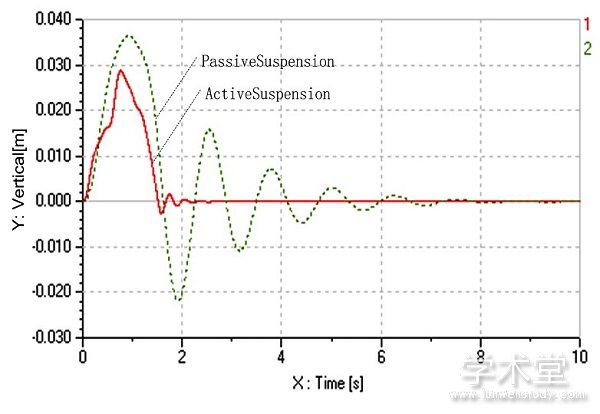
图8 包块路面输入垂向振动曲线对比
图6~8为光滑包块路面输入下主被动悬架俯仰、侧倾和垂向振动对比曲线。从曲线对比中可以看到, 相对于同一光滑包块路面冲击, 主动悬架的俯仰、侧倾和垂向振动幅度及振动的收敛速度都优于被动悬架, 与预期设想一致, 由此可以看出, 本文所提出的AMESim与Simulink的机电液联合仿真方案是可行的。
4、小结
本文分析了AMESim及Simulink外部接口的特点, 提出了基于S-Function的Simulink与AMESim的机电液联合仿真方案, 并以液压主动悬架为例, 在AMESim中建立了主动悬架机械结构仿真模型、主动悬架液压系统仿真模型, 在Simulink中建立了基于模糊自整定参数PID的大系统分散控制策略仿真模型, 然后调用由MTALAB提供的SL2AME函数, 将在Simulink中建立的控制算法转换为能在AMESim中调用的用户自定义元件模型, 最后在AMESim中调用上述控制算法元件模型, 完成联合仿真平台的搭建, 通过仿真验证, 得到主动和被动悬架的振动曲线图, 通过分析可知, 主动悬架的性能明显优于被动悬架, 同时也证明了本文所提出的基于AMESim及Simulink的机电液联合仿真平台方案是可行的, 为农机设备研发过程中机电液系统的联合仿真提供了一种解决方案。
参考文献
[1]陈银卫。拖拉机电液悬挂控制系统研究[D].湖北工业大学, 2017.
[2]路少中。电子控制技术在拖拉机液压悬挂系统的研究[J].农业与技术, 2018, 38 (08) :93.
[3]李力。基于惯性调控的主动悬架技术研究[D].吉林大学, 2011.
[4]严翩。环卫机械手的电液伺服系统研究与仿真[D].湖北工业大学, 2016.
[5]盛云, 吴光强。 7自由度主动悬架整车模型最优控制的研究[J].汽车技术, 2007 (06) :12-16.
[6]王静。液压支架试验台液压系统动态特性分析[D].太原科技大学, 2010.
[7]陈蒋, 王淼森, 赵明, 等。玉米播种机电液播深调节装置运动仿真与优化[J].农机化研究, 2017, 39 (10) :128-132.
[8]姚国庆。简述智能农机液压系常见故障的排除方式[J].中国农业信息, 2017 (15) :87-88.





