井灌区小麦玉米轮作机械化农艺体系构建
时间:2014-10-08 来源:未知 作者:学术堂 本文字数:8418字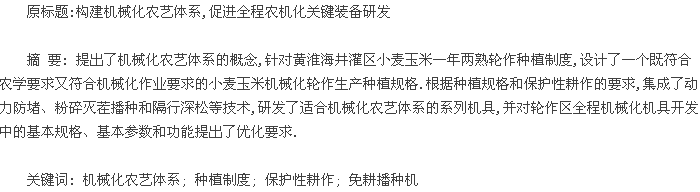
0 引言
农业机械化是指运用先进适用的农业机械装备农业,改善农业生产经营条件,不断提高农业的生产技术水平和经济效益、生态效益的过程[1].农业机械化水平是农业现代化的衡量标准[2],农艺水平是农业现代化的重要保障,农业现代化离不开农机与农艺的有机融合.
农机农艺融合的实质是现代工程技术和现代农艺( 生物) 技术的融合,其采用现代工程技术改变传统的生产技术.农机农艺融合要按照因地制宜、经济有效、促进发展的原则,实现优势互补、互促共进.农机技术要为农业的增产增收、高效优质、低耗安全服务,农艺技术( 育种、栽培、土肥、植保、灌溉等) 的研发则要优先考虑机械化生产实施的可行性[3].农机农艺有机融合的关键不是农机适应农艺的问题,也不是农艺适应农机作业要求的问题,而是把农机农艺的研究放到整个现代化农业生产的全周期中去考虑,统筹优化农业生产的各个环节,在全程机械化的背景下设计农艺规格和农机装备基本规格,从而实现全局最优.
工业生产中有工艺过程,每个环节叫作机制工艺; 农业生产中也有工艺过程,与工业生产相比较,应叫作农艺过程,相应地每个由机械来完成的环节应当叫作机械化农艺.整个机械化生产过程包含的相互关联的所有机械化农艺构成一个体系,称之为机械化农艺体系.研究或组织实施农业机械化,一定要有体系的概念,要把每一个机械化农艺环节都作为整个体系的有机组成部分,要特别重视前后环节的必然联系和它们的相互影响,不能只管一个或几个环节.
那么,实现全局最优的技术路线是什么呢? 古人云: "自古不谋万世者,不足谋一时; 不谋全局者,不足谋一域"( 清,陈澹然《寤言二迁都建藩议》) .山东理工大学国家"十二五"项目课题组和山东省玉米产业体系创新团队在研究玉米免耕播种机和玉米联合收获机关键装备时发现: 在黄淮海小麦玉米轮作区,解决农机农艺有机融合问题绝不只是玉米机械化生产的问题,它与小麦如何种植、灌溉和收获关联度极高.
例如,井灌区小麦畦子宽度是玉米播种机设计的关键基础参数.因此,必须把农业生产机械化放在一个具有完整周期的生产体系中去研究,而不能就事论事地研究一个环节的机械化.为此,需要用系统工程的方法,构建机械化生产体系,在体系的框架下研究农机农艺结合的问题,逐步实现有机结合.例如,小麦玉米轮作机械化生产体系、小麦花生轮作机械化生产体系、棉花小麦"玉米两年三作"机械化生产体系等都需要在全程机械化的背景下统筹优化,构建各自的机械化农艺体系,从而更好地促进全程机械化关键装备的研发.
根据小麦玉米一年两熟轮作区保护性耕作条件下的全程机械化生产,构建了"井灌区小麦玉米保护性轮作机械化生产体系",主要机械化生产环节为: 玉米秸秆还田→小麦深松免耕施肥播种→小麦追肥→小麦灌溉→小麦病虫害防治→小麦联合收获→小麦干燥与仓储→玉米免耕施肥播种→玉米追肥→玉米灌溉→玉米病虫害防治→玉米联合收获→玉米干燥与仓储.影响这个体系的共性技术是什么? 不是机器,是农艺.更具体地说是种植规格-小麦种植畦子宽度、播种行数、苗带宽度、深松方式、玉米种植畦埂保留、畦内玉米播种行数等.决定种植规格中的关键参数畦子宽度的决定性因素是什么.不是农艺,而是拖拉机的轮距.这是农机与农艺的内在联系.因此,设计了一个既符合农学要求又符合机械化作业要求的小麦玉米机械化保护性轮作基本种植规格,如图 1所示.这是一个适合大马力拖拉机机械化作业的基本规格,非常有利于小麦、玉米播种和联合收获机械化,对本体系各环节机械装备的研制与生产提出了明确的农艺参数要求.同时,在淄博市傅家镇的 4. 7hm2试验田进行了试验,取得了满意的效果.
山东属于黄淮海井灌区,是我国主要的产粮地区之一.山东的主要种植模式是小麦玉米轮作一年两熟和小麦棉花一年两熟轮作制度.在山东井灌区建立小麦玉米和小麦棉花轮作机械化农艺体系,不仅能够实行标准化播种、标准化管理、标准化收获,节省人力、物力以及财力,而且还有利于农业现代化的快速发展.
机械化农艺体系中,不仅要有适应机械化作业的标准种植体系,还需要适用于本体系各作业环节的农业机械装备.2BYM-12 型折叠式动力防堵智能免耕玉米精量免耕播种机、2BYFJ-4 灭茬型智能免耕玉米精量播种机、2BMFS-A1/A2 型玉米精量免耕施肥播种机、4YZFP-4 横辊摘穗式轻型玉米收获机、2BSMF-8 小麦深松免耕播种机等都是根据井灌区小麦玉米轮作机械化农艺体系研制出来的相应机具.本文旨在建立井灌区小麦玉米轮作机械化农艺体系,并基于全程农机化对关键装备研发过程中的基本结构性能参数进行研究.
1 井灌区小麦玉米轮作机械化农艺体系
1. 1 机械化农艺体系采用的耕作方法
采用保护性耕作方法和机械化作业进行作物轮作,称之为机械化保护性轮作.在黄淮海一年两熟区,有小麦玉米轮作、小麦水稻轮作、小麦花生轮作等,最近出现了小麦棉花轮作,都需要机械化保护性轮作.
1. 2 保护性耕作的特点和作用
保护性耕作是用作物秸秆残茬覆盖地表,最低限度地耕作,采用化学和生物方法控制杂草和病虫害的一种耕作技术.它的主要特点是秸秆覆盖、免耕播种、深松少翻、化学除草.实施保护性耕作能够提高土壤有机质含量、保持水土、保护土壤生物多样性、逐步减少化肥用量,促进农业可持续发展.
1. 3 小麦玉米机械化保护性轮作的特殊性
1) 作业环节多,时间要求紧迫.小麦玉米轮作是在三夏、三秋的换茬季节,既要抢收,又要抢种.
2) 秸秆量大,处理难,免耕播种难.小麦玉米轮作的每季秸秆量大约为 9 000 ~12 000kg/hm²[5],造成小麦玉米的播种困难.
3) 采用畦作,畦宽规格繁多.井灌区的小麦玉米轮作的种植模式多为畦作,为了方便农民作业,畦宽很小,对机械化作业限制最大.
4) 有深松要求.小麦播前深松和玉米行间深松的技术要求高,能耗大.
5) 畦内种植要求特殊.保留畦埂,畦内小麦、玉米行数和行距要系统考虑拖拉机轮距,播种机、秸秆还田机、田间作业机宽度及收获机轮距等行走机器要系统考虑.
1. 4 机械化保护性轮作面临三大关键技术问题
1) 作业环节多.机械化农艺体系需要考虑的主要环节: 玉米秸秆还田、小麦播前深松、小麦免耕施肥播种、小麦追肥、小麦联合收获、小麦干燥与仓储; 玉米免耕施肥播种、玉米追肥、玉米施农药、玉米联合收获、玉米干燥与仓储.
2) 统一种植规格的要素.畦宽、行数、行距、苗带宽、深松行距等都是标准化种植体系中种植规格需要考虑的因素.
3) 关键装备和核心技术问题.井灌区小畦种植要求苛刻,要保证畦内作业不破坏畦埂,必须系统考虑畦宽,畦内小麦、玉米行数和行距,小麦苗带宽度,拖拉机轮距,播种机、秸秆还田机、田间作业机宽度,收获机轮距及深松行距等.同时,在此基础上设计相应的小麦免耕深松施肥播种机、玉米免耕施肥播种机、玉米联合收获机( 可收获玉米秸秆的) 、干燥与仓储技术与装备等.
1. 5 机械化农艺体系的种植规格
构建机械化农艺体系,在体系的柜架下研究农机与农艺的结合,逐步实现有机结合是农机农艺结合的内在要求.针对本课题所研究的小麦玉米轮作机械化农艺体系,设计了一个既符合农学要求又符合机械化作业要求的小麦玉米机械化保护性轮作基本种植规格: 畦子宽度 2 400mm,垄背宽 300mm,播种 8 行小麦,行距 280mm,苗带宽度 120 ~140 mm,小麦播种行间深松、深松行距 560mm; 对深松铲实行两排分布、四三布置,第 1 年深松 4 行,第 2 年深松另外 3 行,第 3年可不深松; 播种 4 行玉米,行距 600mm,为防涝,不深松.
标准化种植的优点: ①规格定型是制定农机设计和生产标准的基础; ②规格定型有利于拖拉机的选型配备; ③种植规格设计必须考虑的基本因素.井灌区小畦种植要求最苛刻,要保证畦内作业不破坏畦埂,必须系统考虑畦宽,畦内小麦、玉米行数和行距,小麦苗带宽度,拖拉机轮距,播种机、秸秆还田机、田间作业机宽度,收获机轮距及深松行距.
这是一个适合大马力拖拉机机械化作业的基本规格,非常有利于井灌区小麦、玉米轮作的播种和联合收获机械化.对本体系各环节机械装备的研制与生产提出了明确的农艺参数要求,以下农业装备就是适应上述作业体系而研发的.
2 玉米播种机械关键装备
小麦玉米一年两作轮作区玉米免耕播种时地表秸秆覆盖量大、播种时容易产生堵塞,并且现有的玉米免耕播种机动力消耗高、缺少播种监测功能.目前,播种机的监测功能主要集中在种肥箱容量、漏播和重播上.采用勺盘式排种器的播种机由于勺盘距地面很低,光电传感器一方面工作不可靠,另一方面也很难监测刮土板间土壤的堵塞问题,影响了监测效果.目前,常见播种机的播种、排肥分别需要两个开沟器进行作业.施肥开沟器安装在播种开沟器之前,造成在免耕播种机上播种、排肥两个开沟器间隔很近,不仅动力消耗高,增加了播种机的材料消耗和生产成本,而且容易产生秸秆以及杂草的拥堵,严重影响播种质量.另外,现有的动力防堵装置只将开沟器立柱上的秸秆打散拨下,旋刀的设计未考虑对小麦根茬的粉碎处理,因此当开沟器正对小麦根茬时,播种和施肥的覆土效果较差,对播种质量造成了一定的影响.结合小麦玉米轮作机械化农艺体系 2. 4m 畦宽和600mm 行距,设计出了以 2. 4m 为基本规格尺寸的 4种玉米播种机械.
2. 1 2BYM-12 型智能免耕玉米精量播种机
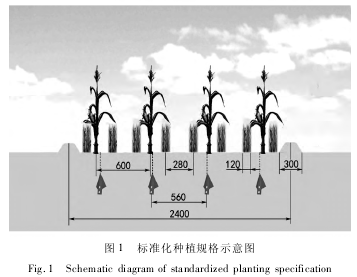
2BYM-12 型折叠式动力防堵智能免耕玉米精量播种机整机方案如图 2 所示.其结构主要有划行器部分、左侧播种单元、前拉杆、机架折叠液压装置、中间播种单元、悬挂装置、农药喷洒装置、右侧播种单元和划行器等.
针对玉米免耕播种机在秸秆覆盖量较大的情况下开沟器易被拥堵的技术难题,对开沟器的防拥堵技术进行多方案设计,每台样机采用采用不同的防拥堵和开沟方式.通过试验防拥堵效果对比,在秸秆覆盖量较大的情况下三段离合式动力防堵装置具有良好的防拥堵效果,解决了玉米免耕播种机开沟器的防拥堵技术.
2. 1. 1 三段离合式动力防堵装置
通过对夏玉米播种机市场调查和播种现场跟踪实地考察,在小麦秸秆覆盖量较大( 干基含水率>0. 6kg / m2) 、秸秆长度较长( >22cm) 、秸秆抛撒不均匀时,播种机开沟犁极易造成秸秆拥堵现象,影响播种机的正常工作.为解决夏玉米区小麦收获后机械播种过程中出现的秸秆拥堵现象、适合播种机液压折叠时的动力自动分离与结合需要、提高播种机的适应性和可靠性,本文设计了 3 段离合式动力防堵装置,如图 3 所示.

该装置具有动力防堵功能和灭茬功能,可以实现折叠时两侧防堵单元自动分离、工作时自动结合的功能.每段动力防堵装置包括安装在机架上的两轴承座板、经轴承安装在两轴承座板之间的旋刀轴和固定安装在旋刀轴上的多组旋刀及牙嵌式离合器.旋刀组数与种肥开沟器数量等同,每个种肥开沟器的立柱前端均设有一组旋刀,每组旋刀包括呈 180°对称安装的旋刀.改型后的 2BYM-12 型折叠式智能免耕玉米精量播种机,样机播种质量稳定,完善了播种机的整机性能,提高了播种机的适应性和可靠性.
2. 1. 2 应用领域
2BYM-12 型折叠式智能免耕玉米精量播种机适用于黄淮海小麦玉米轮作区小麦收获后玉米机械化免耕播种,也可用于大豆免耕播种及其他地区相似农艺条件下的玉米机械化免耕播种.该机整机宽度7. 2m,适合 73. 5kW 以上大马力拖拉机配套作业,尤其适合种粮大户、家庭农场等规模化经营的大地块作业.实践表明,在我国冬小麦-夏玉米一年两熟地区进行免耕播种有蓄水保墒、减少地下水消耗、培肥地力、改善生态环境和减少作业环节的综合效应[6-8].
2. 1. 3 技术原理
整机采用模块化设计,从前向后依次是: 仿形地轮、播种深度调节装置及排肥排肥传动装置( 包括株距无级调节器) 、苗带清理与防拥堵装置、一体化种肥开沟器[9]、施肥装置、精量播种装置、智能化播种监测装置和镇压覆土装置.基本工作原理是: 拖拉机牵引浮动播种机作业,拖拉机动力输出轴经万向节驱动动力防堵装置旋转,动力防堵装置将种肥开沟器前方的秸秆切碎,每行两把平面弯刀做滑切和前抛运动,清理苗带、划破地表,同时剔除开沟器立柱挂草,保证不发生麦草拥堵.4 个种肥开沟器经立柱垂直固定在前机架后端的横梁上.播种作业时,肥料沿着每个种肥开沟器的立柱下落,肥料落入开沟犁铲开好的沟槽内; 肥料入土后,前刮土板将沟槽两侧的部分土壤刮回沟槽内,形成对肥料的覆盖,并刮出一定深度平整的种床; 两块护种板形成的空腔护持排种器排下的种子落入种床,在护种板上铰接的后刮土板在弹簧力的作用下刮拨土壤形成对种子的覆盖,镇压轮在弹簧紧牙下完成后续覆土镇压作业.播种监控系统自动采集滑移率、排种排肥堵塞情况及播量,并实时数显和自动报警.
2. 2 2BYFJ-4 灭茬型智能免耕玉米精量播种机
2. 2. 1 应用领域
2BYFJ-4 灭茬型智能免耕玉米精量播种机( 见图4) 将秸秆粉碎还田与玉米免耕施肥播种功能集成一体,一次完成秸秆粉碎还田和玉米免耕施肥播种作业,具有独特的秸秆粉碎还田灭茬功能、开沟器防拥堵功能、株距调节功能、播种施肥量精密监测功能、播种深度调节功能和作业仿形功能,智能化程度高、作业质量好,尤其适于大面积平整地块高效作业.

2. 2. 2 技术方案
1) 将秸秆粉碎还田与玉米免耕施肥播种功能集成一体,一次完成秸秆粉碎还田和玉米免耕施肥播种作业,具有独特的秸秆粉碎还田灭茬功能.其既避免了秸秆堵塞,提高了播种作业的质量和效率,又改善了玉米播种苗床的条件,有利于玉米根系的生长,增强作物抗倒伏能力; 同时,减少了作物秸秆病虫害对作物生长的影响,具有一定的生态保护意义,经济效益较明显.
2) 开沟器防拥堵功能.在开沟器立柱前部的转轮式防堵装置,能够有效地将开沟器前部的秸秆拨开,防止开沟器拥堵,提高了播种和施肥的作业质量.
3) 播种施肥量精密监测功能.该机集成了模块化播种性能监测系统,可实时完成播种工况的监测,对种子重播、漏播、堵塞、缺种故障均发出声光警示,显示故障点位置; 对化肥堵塞、缺肥故障均发出声光警示,显示故障点所在的行数.
4) 该机集成了株距调节器,首次实现了玉米精量播种对株距精确调节的要求,具有较高的智能化水平.该装置装卸非常方便,可以很方便地作为模块化配件推广到其他播种机.
2. 3 2BMFS-A1 /A2 型玉米精量免耕施肥播种机
2. 3. 1 应用领域
黄三角生态区免耕播种机研制与示范适用于黄三角小麦玉米轮作区小麦收获后玉米免耕精量施肥播种,也可用于大豆免耕精量播种及其他地区相似农艺条件下的玉米免耕精量播种,如图 5 所示.

2. 3. 2 技术原理
每个播种单元由仿形地轮、播种深度调节装置及排肥传动装置、苗带清理与防拥堵装置、一体化种肥开沟器、施肥装置、精量播种装置( 包括株距调节器)和镇压覆土装置等组成.其基本工作原理是: 拖拉机牵引浮动播种机作业,拖拉机动力输出轴经万向节驱动动力防堵装置旋转; 动力防堵装置将种肥开沟器前方的秸秆切碎,每行两把平面弯刀作滑切和前抛运动,清理苗带、划破地表,同时剔除开沟器立柱挂草,保证不发生麦草拥堵.播种作业时,肥料沿着每个种肥开沟器的立柱下落,肥料落入开沟犁铲开好的沟槽内; 肥料入土后,将沟槽两侧的部分土壤刮回沟槽内,形成对肥料的覆盖,并刮出一定深度平整的种床; 两块护种板形成的空腔护持排种器排下的种子落入种床,在护种板上铰接的后刮土板在弹簧力的作用下刮拨土壤形成对种子的覆盖,镇压轮在弹簧紧压下完成后续覆土镇压作业.
3 玉米收获机械
3. 1 4YZFP-4 横辊摘穗式轻型玉米收获机
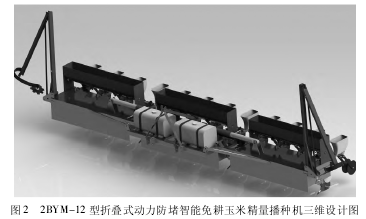
横辊摘穗式轻型玉米收获机如图 6 所示.
3. 1. 1 设计方案
采用多组用于横向摘穗的玉米收获割台,包括两个轴向相互平行的长短摘穗辊和茎秆导向装置; 茎秆导向装置位于横辊摘穗装置前部,包括分禾器和配合拨禾链完成茎秆导向输送的八角星轮; 摘穗辊后方设有果穗横向输送装置,可以将摘穗辊摘下的果穗横向送入果穗升运器的入口; 果穗经果穗升运器送往果穗剥皮装置,其中剥皮后的果穗落入果穗收集箱; 剥下的苞叶经逐稿轮除草装置排出机外,而在剥皮过程脱落并混杂在苞叶中的籽粒落入籽粒回收箱,以减少收获过程的籽粒损失.
1) 总体方案设计与布局.根据横辊摘穗式玉米收获机的功能要求,对横辊摘穗式玉米收获割台、果穗横向输送装置、果穗升运装置、果穗剥皮装置、籽粒回收装置及果穗收集箱等核心部件进行合理的布局研究和传动路线分配.
2) 研制横辊摘穗式玉米摘穗技术,形成横辊摘穗式玉米收获单元体.该单元体包括两个轴向平行且长辊位置略低于短辊的摘穗单元.其中,长、短摘穗辊前部为叶片高度较大的凸棱,便于将导入的玉米茎秆强制快速向一侧推送; 摘穗辊中部为相互错位、螺距逐渐加大的反向螺旋凸棱,有利于抓取茎秆,并快速横向输送,摘下果穗; 摘穗辊后部为带有平行于摘辊轴线方向的直凸棱,可以将未摘下果穗的茎秆直接挤断,防止茎秆在此的堵塞; 摘下的果穗由于长摘穗辊低于短摘穗辊而落入位于长摘穗辊后方的横向输送装置,由输送装置横向输送至果穗升运器的入口.
3) 研制玉米茎秆的喂入装置.茎秆喂入装置位于横向摘穗辊前部,包括分禾器、拨禾链和八角星轮.分禾器首先将茎秆分开并导向拨禾链,接着在拨禾链拨指的作用下,与被动转动的八角星轮一起将玉米茎秆喂入横向摘穗辊的入口.在此过程,八角星轮的星齿配合拨禾链的拨指,使每个玉米茎秆处于一个封闭空间,防止了茎秆的滑脱和折断,既减少了果穗的漏摘损失,又保证了工作的可靠性.
4) 研制苞叶排出与籽粒回收装置.为了提高剥皮效率,剥皮辊转速较高,加之果穗生长存在一定的不一致性,导致剥皮过程存在一定的籽粒脱落.为了减少收获损失,研制了气流-逐稿轮式苞叶排出与籽粒回收装置,可以将夹杂在苞叶中的籽粒分离出来,并收集在位于其下的籽粒回收箱.
3. 1. 2 与机械化农业体系结合点
1) 研制的结构紧凑的轻型玉米联合收获机,适合种植行距为 600mm 的玉米种植模式,直接对行收获,收获效率高.
2) 摘穗辊结构为两个长短轴相平行,螺旋错位啮合、旋向相反的结构组成,减小了秸秆的挤压变形量,降低了功率消耗( 由原来的 9kW/行减到 7. 8kW/行,果穗啃伤率 1. 3% ) ; 采用星轮-拨禾链式导向装置,传动简单( 星轮被动转动) ,且形成了茎秆导向封闭区,防止了茎秆滑脱和折断.
3) 气流-逐稿轮式籽粒回收装置,使苞叶处于蓬松状态下分离夹带的籽粒,故回收效果好.
4 小麦播种机械
4. 1 整机方案的确定
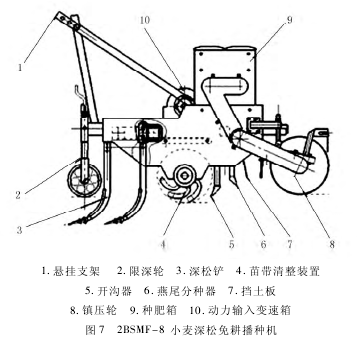
按照小麦深松技术、旋耕设计、深施肥技术、苗带清整技术[11-12]进行整机研究.本机具将深松技术和苗带清整技术作为整机研究的重点.图 7 为小麦深松免耕播种机整体设计方案.
4. 2 工作原理
小麦播种机在拖拉机的牵引下前进,在机具前进过程中使深松铲深入地下,完成深松过程; 拖拉机动力通过变速箱传递给旋耕装置,该装置在高速旋转的同时对播种苗带行的土壤进行旋耕,同时开出播种苗带; 镇压轮通过链传动驱动上位外槽轮排种器和排肥器,排出的种子通过导管进入燕尾分种器实现均匀苗带播种,排出的肥料通过施肥装置施入土壤中; 旋耕起的土壤被甩至挡土板后落入播种后的苗带上,经镇压轮压实后完成整个深松免耕播种过程.
4. 3 与机械化农业体系结合点
1) 充分满足畦子宽度 2 400mm、垄背宽 300mm,播种 8 行小麦、行距 280mm、苗带宽度 120mm,小麦播种行间深松、深松行距 560mm,对深松铲实行两排分布、四三布置,第 1 年深松 4 行、第 2 年深松另外 3 行第 3 年可不深松的机械化农艺规格.
2) 将深松和动力防堵免耕播种结合了起来,可一次性完成深松、施肥播种作业,符合发展大中马力拖拉机配套机具的技术趋势.
3) 有明显的节能、保墒、增产等综合效果.
5 结论
机械化农艺体系是在农机农艺融合前提下提出的一个新概念,在机械化农艺体系中,基于全程农业机械化作业,统筹优化出了标准化的种植规格.根据标准化种植规格,可优化和促进小麦玉米轮作区全程机械化关键装备的开发.结合小麦玉米轮作机械化农艺体系 2.4m 畦宽和 600mm 行距,设计出了以 2. 4m为基本规格尺寸的 3 种玉米免耕播种机和 1 种小麦免耕播种机具及 1 种新型玉米联合收获机.经过两轮大田试验,整个全程机械化装备适合大马力拖拉机作业,装备规格得到优化,作业效果好.
参考文献:
[1] 黄光群,韩鲁佳,刘贤,等. 农业机械化工程集成技术评价体系的建立[J]. 农业工程学报,2012( 16) : 74-79.
[2] 黄长玉. 浅析玉树发展适应当地特色的现代化农业机械[J]. 吉林农业,2010( 12) : 225.
[3] 张东兴. 农机农艺技术融合 推动我国玉米机械化生产的发展[J]. 农业技术与装备,2011( 9) : 22-25.
[4] 佚名. 农机农艺有机融合是推进我国农业现代化的强大引擎[J]. 农村牧区机械化,2011( 3) : 1.
[5] 李秀和,陈绍年,钟明星. 马铃薯、甜玉米、长豇豆、水稻套种轮作高效栽培技术[J]. 现代农业科技,2006( 5) : 52.
[6] 姚宗路,李洪文,高焕文,等. 一年两熟区玉米覆盖地小麦免耕播种机设计与试验[J]. 农业机械学报,2007,38( 8) : 57-61.
[7] 陈君达,李洪文. 旱地玉米保护性耕作机具与作业工艺的组合研究[J]. 农业工程学报,1998,14( 3) : 129-134.
[8] Hanna HM,Steward BL,Aldinger L. Soil loading effects ofplanter depth-gauge wheels on early corn growth[J]. AppliedEngineering in Agriculture,2010,26( 4) : 551-556.
[9] 杨自栋,杜瑞成,刘宁宁,等. 设有动力防堵与一体化开沟器的播种机: 中国,201210362643. 1[P]. 2013-01-02 .
[10] 丁翔文,徐振兴,李博强,等. NYT-1628-2008 玉米免耕播种机作业质量[S]. 北京: 中国农业出版社,2008.
[11] 何 进,李洪文,王庆杰,等. 动力甩刀式小麦固定垄免耕播种机[J]. 农业机械学报,2011,42( 10) : 51-56.
[12] 李太伟,李洪文,何 进. 2BMF-5 固定垄小麦免耕播种机的设计[J]. 农机化研究,2008( 10) : 50-53.
- 相关内容推荐
- 国内外翻转犁研究及发展现状2014-10-13
- 农田灌溉的自航式农用输水泵船的技术改造2015-01-22
- 大马力精播机的田间无线调度系统设计2014-09-10
- 小区播种机作业图自动生成软件设计2014-09-09
- 利用ANASYS分析秸秆的压缩过程2014-09-10
- 农业无人机技术在国内外的应用现状2014-11-27
- 国内外穴盘育苗精密播种机研究现状及原理分析2015-04-13
- 微耕机在我国西南地区应用的阻碍因素及解决措施2014-09-12
- 上一篇:玉米收获割台整体与部件的优化设计
- 下一篇:基于GPS的平地系统设计与试验





