水果表面信息采集中全真采像技术的研究成果(2)
时间:2017-05-26 来源:农机化研究 作者:刘婷,张绍英,王叶群 本文字数:8047字 2. 1. 3 光学辅助装置静止采像
李庆中等(2002)[21]利用光学辅助系统和两个不同相机进行了获取水果全部表面信息的尝试。在水果的正上方安装 1 个双 CCD 相机,彩色 CCD 用于采集水果的彩色图像信息,黑白 CCD 则采集近红外波段的图像信息。水果利用无底果杯传输,在水果的下方安装 1 个黑白 CCD 相机采集水果下表面的图像信息。为了尽可能多地获取水果的全表面图像信息,在水果的两侧分别安装一面平面镜,则处于水果正上方的双CCD 相机可以同时获取水果的 3 幅图像,从而两 CCD相机可获取水果的多表面图像信息。由于平面镜中水果图像存在的畸变及图像背景混乱,后续运算中除进行几何修正外,还需要设计不同的背景分割算法,增加了运算量。
Reese 等(2008,2009)[22 -23]尝试利用镜子克服采像过程中区域缺失的问题,如图 4 所示。研究发现:在置于两条平行缆线上的苹果两侧放置两凸面镜时,可以获取苹果接近 100% 的表面图像。尤其是当苹果轴线恰与两缆线所在平面垂直,或苹果轴线与两缆线平行时,获取苹果表面图像信息最多。

由于光学辅助成像多用面镜反射原理获取背向相机一侧的图像,不仅图像背景混乱,还易产生面镜中图像畸变严重的问题,需附加校正运算,进一步提高了算法的复杂程度,降低了运算速度。
2. 2 水果运动成像水果运动成像
是指以固定机位对运动过程中的水果的成像,包括对受控运转和自由运动两种过程中的水果进行成像两种情况。水果运动成像一般由光源、过程运动调控系统或初始运动调整系统和相机组成,水果运动调整、调控系统复杂,要求相机感光灵敏度高,其明显优势是图象采集效率高,处理能力低,故广泛应用于实际生产。
2. 2. 1 运动控制成像
运动控制成像是指采取强制措施控制水果的运动状态后,对受控运动过程中的水果进行成像的采像方法。运动控制成像突出的优势为可有效控制获取图像对水果表面的全面覆盖,但图像处理时仍需进行无效影响分割。
为了改善静止成像中水果表面信息缺失和失真问题,目前常用的方法是利用旋转托辊带动水果平动和翻滚,在水果运动过程中用单机位、多次成像采集多个位置的表面图像信息[24 -30]。
谢国俊等(2007)[31]将水果放置于连续平动的传送带上的托盘中,3 个 CCD 相机布置在与水果运动方向垂直的竖直面内。其中,1 只相机位于传送带的上方,光轴与水果形心的运动轨迹垂直相交;另两只CCD 相机分别布置于传送带两侧,光轴与传送带的上方 CCD 相机的光轴交于水果形心,交角均为 60°,3 个CCD 相机具有一定的重叠采集区域。当水果形心与相机 3 光轴所在平面重合时,3 个 CCD 相机同时在不同的方位上采集水果表面的大部分信息。
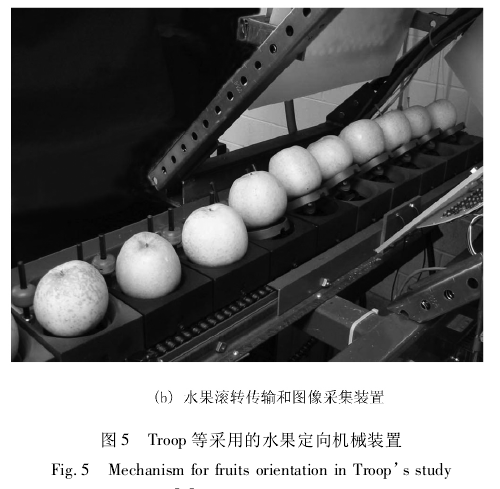
Troop 等( 2005 )[32 -34]首先利用苹果对称轴线将苹果定位于输送链的托盘上(见图 5),托盘内环可自由旋转,每个托盘一侧布置两个与苹果轴线平行的竖直塑料托轮;当苹果进入采像工位时,由于托盘翻转带动托轮及苹果在与输送链运动方向垂直的平面内倾斜 45°并使苹果轴线与相机光轴垂直;此时苹果继续向前输送时,与托轮之间的摩擦带动苹果沿自身轴线按设定的角速度转动 360°,苹果每旋转 30°相机采像一次,用 12 幅图像获取苹果的全表面信息。

Kondo (2010)[35]在检测橘子的外部特征时,利用在不同方位布置的 6 只固定 CCD 相机,即可使橘子平动过程中产生滚转的特殊输送带来检测橘子表面信息。在第 1 个采像工位,4 只相机在传输带两侧两两相对、交叉布置于水平面,从 4 个方向检测橘子的侧面信息。第 2、3 个采像工位,各有 1 只相机垂直布置于传输带正上方,由第 2 采像工位转换至第 3 采像工位过程中,橘子沿水平轴旋转 180°,用于采集第 1 采像工位为覆盖的顶部和底部信息,用顺序获取的 6 幅图像反映橘子的全部表面信息。
李伟等(2006)[36]利用特殊输送链控制苹果作平动加滚转运动,CDD 相机固定于图像采集区的上方。苹果经过采集区域时,CDD 相机以适当时间间隔采集 3 幅图像,即可覆盖苹果 90% 以上表面信息。
邹小波等(2010)[37]利用 3 个相互独立的成像系统进行苹果表面信息采集。3 个成像系统所属 3 相机布置在采像工位的上方;3 相机光轴均位于苹果运动方向的铅垂面内,且与采像工位的苹果的形心相交;3相机光轴间具有一定夹角。苹果在输送链承托下进入采像区域受托辊驱动开始旋转,到达采像工位后同时触发 3 只相机,通过与运动参数的匹配,3 只相机完成 3 次同步采像,用 9 幅图像全面反映苹果表面图像信息。
上述几种水果运动控制方法有利于获取水果的全表面信息,但仍然存在不同程度的漏采,且其图像质量欠佳。同时,多次采像造成的冗余信息加重了运算负荷。
李庆中等(2002)[21]利用光学辅助系统和两个不同相机进行了获取水果全部表面信息的尝试。在水果的正上方安装 1 个双 CCD 相机,彩色 CCD 用于采集水果的彩色图像信息,黑白 CCD 则采集近红外波段的图像信息。水果利用无底果杯传输,在水果的下方安装 1 个黑白 CCD 相机采集水果下表面的图像信息。为了尽可能多地获取水果的全表面图像信息,在水果的两侧分别安装一面平面镜,则处于水果正上方的双CCD 相机可以同时获取水果的 3 幅图像,从而两 CCD相机可获取水果的多表面图像信息。由于平面镜中水果图像存在的畸变及图像背景混乱,后续运算中除进行几何修正外,还需要设计不同的背景分割算法,增加了运算量。
Reese 等(2008,2009)[22 -23]尝试利用镜子克服采像过程中区域缺失的问题,如图 4 所示。研究发现:在置于两条平行缆线上的苹果两侧放置两凸面镜时,可以获取苹果接近 100% 的表面图像。尤其是当苹果轴线恰与两缆线所在平面垂直,或苹果轴线与两缆线平行时,获取苹果表面图像信息最多。
由于光学辅助成像多用面镜反射原理获取背向相机一侧的图像,不仅图像背景混乱,还易产生面镜中图像畸变严重的问题,需附加校正运算,进一步提高了算法的复杂程度,降低了运算速度。
2. 2 水果运动成像水果运动成像
是指以固定机位对运动过程中的水果的成像,包括对受控运转和自由运动两种过程中的水果进行成像两种情况。水果运动成像一般由光源、过程运动调控系统或初始运动调整系统和相机组成,水果运动调整、调控系统复杂,要求相机感光灵敏度高,其明显优势是图象采集效率高,处理能力低,故广泛应用于实际生产。
2. 2. 1 运动控制成像
运动控制成像是指采取强制措施控制水果的运动状态后,对受控运动过程中的水果进行成像的采像方法。运动控制成像突出的优势为可有效控制获取图像对水果表面的全面覆盖,但图像处理时仍需进行无效影响分割。
为了改善静止成像中水果表面信息缺失和失真问题,目前常用的方法是利用旋转托辊带动水果平动和翻滚,在水果运动过程中用单机位、多次成像采集多个位置的表面图像信息[24 -30]。
谢国俊等(2007)[31]将水果放置于连续平动的传送带上的托盘中,3 个 CCD 相机布置在与水果运动方向垂直的竖直面内。其中,1 只相机位于传送带的上方,光轴与水果形心的运动轨迹垂直相交;另两只CCD 相机分别布置于传送带两侧,光轴与传送带的上方 CCD 相机的光轴交于水果形心,交角均为 60°,3 个CCD 相机具有一定的重叠采集区域。当水果形心与相机 3 光轴所在平面重合时,3 个 CCD 相机同时在不同的方位上采集水果表面的大部分信息。
Troop 等( 2005 )[32 -34]首先利用苹果对称轴线将苹果定位于输送链的托盘上(见图 5),托盘内环可自由旋转,每个托盘一侧布置两个与苹果轴线平行的竖直塑料托轮;当苹果进入采像工位时,由于托盘翻转带动托轮及苹果在与输送链运动方向垂直的平面内倾斜 45°并使苹果轴线与相机光轴垂直;此时苹果继续向前输送时,与托轮之间的摩擦带动苹果沿自身轴线按设定的角速度转动 360°,苹果每旋转 30°相机采像一次,用 12 幅图像获取苹果的全表面信息。
Kondo (2010)[35]在检测橘子的外部特征时,利用在不同方位布置的 6 只固定 CCD 相机,即可使橘子平动过程中产生滚转的特殊输送带来检测橘子表面信息。在第 1 个采像工位,4 只相机在传输带两侧两两相对、交叉布置于水平面,从 4 个方向检测橘子的侧面信息。第 2、3 个采像工位,各有 1 只相机垂直布置于传输带正上方,由第 2 采像工位转换至第 3 采像工位过程中,橘子沿水平轴旋转 180°,用于采集第 1 采像工位为覆盖的顶部和底部信息,用顺序获取的 6 幅图像反映橘子的全部表面信息。
李伟等(2006)[36]利用特殊输送链控制苹果作平动加滚转运动,CDD 相机固定于图像采集区的上方。苹果经过采集区域时,CDD 相机以适当时间间隔采集 3 幅图像,即可覆盖苹果 90% 以上表面信息。
邹小波等(2010)[37]利用 3 个相互独立的成像系统进行苹果表面信息采集。3 个成像系统所属 3 相机布置在采像工位的上方;3 相机光轴均位于苹果运动方向的铅垂面内,且与采像工位的苹果的形心相交;3相机光轴间具有一定夹角。苹果在输送链承托下进入采像区域受托辊驱动开始旋转,到达采像工位后同时触发 3 只相机,通过与运动参数的匹配,3 只相机完成 3 次同步采像,用 9 幅图像全面反映苹果表面图像信息。
上述几种水果运动控制方法有利于获取水果的全表面信息,但仍然存在不同程度的漏采,且其图像质量欠佳。同时,多次采像造成的冗余信息加重了运算负荷。
- 相关内容推荐
相近分类:
- 上一篇:三类秸秆打捆机的性能特点及展望
- 下一篇:园艺作物种植人工智能平台的构建
推荐阅读





