车队协同驾驶,是指在兼顾道路交通安全与效率的前提下,充分利用道路条件,将若干单车组成跨车道柔性车队,使其不仅具有单车道车队速度快、间距小等特点,还能根据不同道路条件,通过车队之间的协调与合作,一方面简化交通控制与管理的复杂程度,有效减缓交通拥堵;另一方面可以减少由人为因素所致的交通事故,保证交通安全,并在此基础上节约能源,减少环境污染。
车队协同驾驶本质上是一个连续动态系统和离散事件系统相结合的混成动态系统,比如车队协作策略的执行和协作模态的变迁。这些连续和离散的动力学行为不仅共同存在,而且相互作用。因此,车队协同驾驶过程既取决于对离散的瞬时事件的响应,又取决于对微分方程和差分方程表示的随时问变化的动力学行为的响应。这样,车队协同驾驶过程就可演化成多模态变迁下的车队协作策略执行过程。
目前,虽然车路通信技术研究较为成熟,已应用于交通诱导和不停车收费等先进交通管理系统,但是支持车队协同驾驶的车车通信技术还处在试验阶段,而且实际道路交通环境难于为实车协同驾驶研究提供试验场地和场景。此外,考虑到车队协同驾驶系统是一个复杂的、分层的混成动态系统,其相关理论与技术仍处在不断发展和完善中,利用各种相关交通仿真技术构建试验平台是非常必要的。
因此,结合混成控制理论与半实物仿真技术,可以为车队协同驾驶混成控制研究提供有效的理论与试验基础。
1、国内外现状分析
目前国际上具有代表性的车路协同计划有:美国车辆和道路设施系统协调计划IntelliDrive、日本“Smartway”计划、欧盟车路协同计划CVIS(Coorperative Vehicle Infrastructure Systems)、SAFESPOT(Smart Vehicle son Smart Roads)、COOPERS(CO-Operative Systems for Intelligent Road Safety)。这些计划将综合应用信息、通信、传感网络、新一代互联网、可信计算和计算仿真等领域的最新技术,实现车辆与道路设施的智能化和信息共享,在实时、可靠的全时空交通信息的基础上,结合车辆主动安全控制和道路协同控制技术,保证交通安全,提高通行效率,实现人-车-路的有效协同。由此可见,实现车路协同技术的功效和作用,关键在于开展智能车路系统中车队协同驾驶研究,其相关研究领域主要涉及车队协同驾驶系统结构、车车通信技术、车队协作策略以及相关交通仿真与试验技术等方面。
1.1 车队协同驾驶系统结构
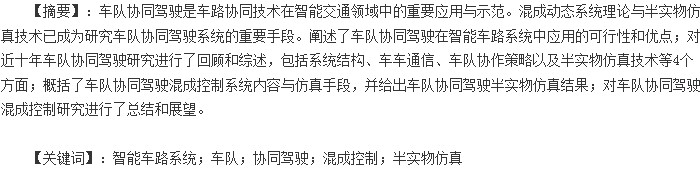
目前国际上车队协同驾驶系统研究主要借鉴智能车路系统体系结构(Intelligent Vehicle Highway Systems Architecture)和混成动态系统理论(Hybrid Dynamic System)两方面。在智能车路系统体系结构方面,美国加州大学Berkeley分校PATH课题组于1991年提出的智能车路系统结构采用分层的结构,具体包括网络层、链接层、协调层、控制层和物理层5个部分(图1)。物理层包括车载控制器以及车辆的物理结构(发动机、油门、制动系统、转向控制系统、车载传感器等),依靠车辆动力学特性,实现车辆的横向及纵向控制。控制层执行相应的操纵策略,指导车辆的横向及纵向控制。协调层根据车辆的位置、数目、即时活动等信息,选定相应的操纵策略,并与不同的协调层和链接层进行通信,即时更新上述信息,并改变相应的操纵策略。链接层将路网划分为不同路段,根据不同路段上的车流密度、车辆起始位置、行驶长度等决定是否需要相关的车辆操纵策略,如巡航、跟随、组合与拆分、车道保持与变换等。通过无线网络,将决策的结果发送到协调层。网络层对整个路网进行管理与规划,增加路网容量,减少车辆平均出行时间,从而缓解交通拥堵。
图1
智能车路系统体系结构日本的Tsugawa等人于2000年提出了车辆协同驾驶系统结构。该系统结构在分析了车辆协同驾驶功能需求和任务分解的基础上,设计了包括交通控制层、车辆管理层和车辆控制层的3层体系结构(图2)。其交通控制层位于路侧,其中,搭建的路侧设备,如可变情报板、标示牌、通信设备等,均用于支持车辆的协同驾驶;制定的基本准则,如规则、规定、行为方式等,均用于指导车辆的协同驾驶。车辆管理层和控制层位于车载端,用于协同驾驶策略的决策与执行。此后,加拿大的Hallé等人吸取和借鉴了Tsugawa的成果,提出车队协同驾驶系统结构(图3),主要对管理层和控制层进行具体的模块化设计,并针对车队协同驾驶过程中数据采集与处理、车队协同控制、车队通信、策略决策等做了详细的说明.上述系统结构都具有较高的实用价值,为车队协同驾驶混成控制系统提供了很好的参考。
图2
图3
在混成动态系统理论方面,由于上述系统是一个分层、分级的复杂系统,不仅包括连续的车辆动力学行为,而且还要考虑离散的瞬时事件响应,美国加州大学Berkeley分校PATH课题组的Horowitz等人在构建智能车路系统体系结构时,提出该体系结构具有混成逻辑性.系统中离散逻辑部分主要处理车车、车路之间的通信。连续逻辑部分利用通信的手段接收所需的安全速度与车距,执行车辆行驶策略。1999年,Lygeros等人利用车车信息交互手段改进车载混成控制系统性能,采用博弈论和最优控制得到安全的约束条件,抑制离散扰动(碰撞)和连续扰动(加速度变化)。2000年,Varaiya等人将智能车路系统的协调层定义为不同车辆利用通信和协作确定相关策略,控制层用于执行协调层传送过来的决策结果。协调层采用有限状态机进行建模,而控制层采用状态反馈定律建立线性模型,从而构成混成动态系统.2000年,Rajamani等人通过分析车辆纵向和横向控制系统,将整个车载控制系统设计为混成动态系统.每一个车辆都有一个监督模型,用于车辆的决策与控制。对于系统的离散状态,可以通过选用合适的差分方程进行求解。
早期的混成动态系统理论主要集中在混成系统结构以及连续时间系统的混成控制器设计,由于缺乏专门的计算机分析及仿真软件,并没有引起重视。
随着多体系统动力学方法及相关软件的发展,混成动态系统建模与仿真也逐渐得到发展。2001年,Jeon等人设计了车辆协同驾驶系统混成控制器,用于车辆组合与拆分策略.在车辆组合与拆分过程中确定安全的组合/拆分距离,通过离散事件监督控制器对其进行控制。2004年,Alain针对从匝道入口驶入主干道车辆引发的碰撞问题,设计了车辆混成控制器.该控制器由混成自动机和导入其中的连续控制定律构成,混成自动机决定车辆何时驶入驶出公路,何时组合及拆分车队等;连续控制定律决定车辆行驶加速度的大小,避免与相邻车辆产生碰撞。2005年,Girard等人考虑车辆控制系统的非线性特性,在设计车载混成控制器时,提出了嵌入式混成控制软件结构.该软件采用基于模型的设计方法,利用混成自动机描述车辆模型及模式切换,如巡航控制(Cruise Control ,CC),自适应巡航控制(Adaptive Cruise Control,ACC),协同式自适应巡航控制(Coordinated Adaptive Cruise Control,CACC)三者的切换过程,采用TEJA语言对模型进行仿真与测试。
1.2 车车通信技术
智能车路系统中的通信网络包括广域有线通信网络、无线通信网络、短程无线通信网络和车车通信网络。正如成熟的车路通信技术在先进交通管理系统中展示出的重要性一样,车车通信技术也已成为车队协同驾驶研究中的关键技术,使车队协同驾驶系统由过去的完全自主驾驶策略(无通信)经历了单、双向信息结构,发展到目前结合传感和车载自组网的全方位信息网络(如图4)。
图4
车车通信技术一般采用红外、激光、毫米波,Zigbee、WiFi及DSRC等方式。作为车载自组网的核心部分,DSRC具有大容量、高速率、低延时、范围合理等特点,因此,车车通信主要采用DSRC网络。然而,DSRC适用于短程无线通信,并需考虑车辆安全和协作等相关规定,一旦信息接收方超出了有效的DSRC传送范围,DSRC网络需要中转的广播信息,这就需要开发有效、可靠的通信协议,并考虑信道使用和阻塞以及机制安全性等问题。
2002年,Tsugawa在分析车车通信功能需求的基础上,提出了载波侦听多址访问(CSMA)协议.虽然载波侦听机制在介质访问控制(MAC)上存在冲突,但是可以满足车载自组网以及数据传送实时性等要求。并且又对载波侦听多址访问不同种类的优缺点进行了比较。2005年,Tatchikou等人设计了用于车辆防碰撞的车车通信协议.该协议首次提出采用广播包转发机制代替传统的单播路由协议,用于DSRC网络中的车车通信数据传送,同时引入握手机制,减少广播通信量增强包数据传送率,并利用开发的车车通信网络模拟器InventSim,验证了车车通信协议的准确性和实时性。此外,车车通信大多发生在高速公路行驶车队中临近车辆的允许通信范围内,匝道车辆想要进入该车队中,也需要采用多跳通信机制。2010年Wolterink等人设计了基于地域性群播(Geocast)的第1版车车通信协议.
该协议采用多跳通信机制,允许匝道车辆提前与车队通信,这样车队就可以送出尽快实现组合要求的安全车间距离及速度信息。
在信道阻塞方面,由于车队协同驾驶功能需要通过车载自组网获得周边车辆的行驶状态信息,虽然可以通过协作改善区域交通可控性,增加区域交通流密度,但是也不可避免地产生了共享信道拥塞问题。2004年,Kaichi和Takaaki结合车车通信和车路通信的优缺点,提出了基于车路协同的介质访问控制协议(Vehicle to Vehicle and Road to Vehicle Collaborative MAC Protocol,VRCP),通过自适应信道分配的方法实现VRCP无缝通信.2004年,Yang等人设计了用于车辆危险预警的车车通信协议.
该协议包括信道拥塞(Channel Congestion)策略,服务多元化机制以及紧急预警发布方法等,可降低不同路况上紧急预警消息发送的延时性。2010年,Huang等人针对信道拥塞问题,提出了结合通信速率和功率的传输控制协议,该协议可以根据车载网络和车辆安全跟踪的动态变化,调整车载自组网的通信速率和功率,利用闭环控制环节解决网络中信道的不稳定性.主要功能是:通信速率控制决定目标车辆广播发送行驶状态信息的频率,功率控制决定目标车辆行驶状态信息广播发送距离,并以此决定802.11p无线电的功率级别。由于MAC阻塞机制本身不能控制通信量和发射功率,从而不能从根本上阻止DSRC网络拥塞。2010年,He等人采用跨层设计方法,在MAC层检测网络拥塞,在应用层控制通信量速率.主要流程是:MAC层通过测量信道占用时间来检测信道拥塞状态并发送拥塞信号;应用层通过获得信道的拥塞状态,对通信量速率进行自适应控制。
由于目前车车通信技术中的多跳广播协议及信道拥塞控制正在制定与测试,建立用于车车通信测试的原型机或仿真平台就显得至关重要。2010年,Grau等人探讨了车车通信使用的信道对车载安全设备或装置的覆盖率、可靠性和实时性的影响,设计了一款基于车路协同系统平台的802.11p样机(CVISOBU).该样机可以通过实测的方法获得不同车车通信场景中的RSSI(Received Signal Strengh Indication)接收的信号强度指示和丢包率,从而评价车车通信信道及模型的准确性。2010年,Fernandes等人扩展了SUMO(Simulation for Urban MObility)模拟器的功能,建立了具备车车通信功能的车队跟随模型。车车通信协议采用车队中的领航车来协调DSRC网络信道中时间槽(Time Slots)的分配,避免了数据包的冲突。设计了车辆跟随的协同驾驶场景,并在SUMO模拟器上开展8辆车列队行驶仿真试验,验证了模型的正确性和鲁棒性,评价了通信延迟对车队行驶稳定性的影响.
1.3 车队协同驾驶策略
目前智能车路系统中车队协同驾驶主要采用5种协作策略,分别是巡航、跟随、换道、组合与拆分策略.巡航策略是指如果车辆是领航车,应该在指定车道内,按照给定的车速,并与前方车辆保持安全的车间距。这些给定的数据包括车速、车间距、车道位置等,是通过车路通信由路侧管理设备发送过来,并利用车车通信传送到车队的每一辆车中.巡航策略主要解决车队速度控制和车队内通信协议的问题。跟随策略是指如果车辆是跟随车,不仅要与前车保持较小的车间距,并且需要保持所处车道的位置.跟随策略应包括纵向上油门和制动器的控制,以及横向上方向盘的控制。换道策略是指车辆试图改变自己所处车道位置的策略,主要体现在车辆横向控制上,并需要考虑车流量、换道时间、换道距离、横向加速度等参数。组合与拆分策略反映了车辆群体协作性,需要依靠车队间通信支持,主要分为本车道与跨车道两种情况.在本车道内,组合与拆分策略比较简单,只需保持稳定的速度以及策略执行所需的车间距离。跨车道情况比较复杂,首先需要依靠车队间通信建立自组织网络,确定队内所处位置或离开位置,其后车辆降低车速,保持策略执行所需安全车间距,从而实现跨车道组合与拆分策略。
考虑到智能车路系统的复杂性,如限速(Speed Limit)、排队(Queuing)、匝道入口及出口(On/Off Ramp)、紧急制动(Emergency Braking)等因素,不同车辆采用协同驾驶策略,依据起点、行驶路线、目的地,组建各自所需的车队,可以简化智能车路系统的复杂程度,增加系统的可组织性,从而增加交通流量。2003年,Alvarez等人针对高速公路交通流特性,考虑多车道、车辆类型以及不同目的地对车流密度的影响,提出以车速和车道位置为输入的Link层控制器。组建的车队根据Link层控制器传送过来的指令信息,采用协作策略,改变车队的速度或者变换车队所在车道的位置,从而使车流密度达到预先设定的要求.2008年,Dao等人通过组建车队、车道分配及车队控制等相关技术,支持车队在多车道并具有多个入口及出口匝道的城市高速公路上协同驾驶。通过为车队分配适合的车道,不仅可以减少该车队的行程时间,而且减少了其它车队,甚至是整个交通流的行程时间.2009年,Xavier等人针对此约束条件,提出了一个实用的车队协同驾驶策略.该策略采用分散PID算法,仅需要通过车车通信获得较少的信息量,如前后车辆的相对位置以及跟随车辆的转角,设计了车辆跟随及超车两个协同驾驶场景,最后采用Matlab的虚拟现实工具箱开展3辆车不同场景下的三维动态可视化仿真,验证了设计的控制器的有效性。2010年,Khaisongkram等人提出了具有不对称信息结构的车辆协同驾驶系统,该系统使用车队中靠近本车的前后车辆的车间距,采用具有广义频率变量(Generalized Frequency Variable)的线性时不变系统证明车辆协同驾驶系统的性能与稳定性,设计了双车道7辆车组合的协同驾驶场景,通过车队组合策略仿真验证了方法的有效性.
从上述车队协同驾驶策略可以看出,车队协同驾驶系统的稳定性不仅表现在单个车辆稳定性和车队稳定性(String Stability),还表现在交通流稳定性(Traffic Flow Stability)以及整个交通容量(Traffic Flow Capacity),还要考虑传感器,车车通信等引起的信息延时对系统稳定性的影响.单个车辆稳定性是指车队中的任意车辆都能按照有界的车间距和速度误差,跟踪前一辆车的速度和加速度。车队稳定性是指车间距和车速误差不会随着车队长度的增加而放大并繁衍到整个车队中。交通流稳定性是指影响某个区域车流密度的扰动,即该区域的匝道入口或出口,不会随着放大而减少该区域的稳态车流密度和平均车速。只有同时保证车队稳定性和交通流稳定性才能提高交通容量。
1.4 交通仿真与试验技术
由于车队协同驾驶系统是一个复杂的、分层的混成动态系统,其相关理论与技术仍处在不断发展和完善的阶段,利用各种相关的交通仿真与试验技术构建研究平台是非常必要的。虽然在实车试验方面,美国、日本以及欧盟中的德国、荷兰、意大利、法国等都开展了车辆自主及协同驾驶实车试验.我国许多高校、科研机构也都建立了车辆驾驶试验平台或测试场地,如吉林大学的JLUIV智能车,清华大学THASV/MR智能车,国防科技大学的红旗智能车,军事交通学院JJUV智能车,西安交通大学的Smartcar,上海交通大学Cybercar,以及交通运输部公路科学研究院构建的北京试验场,长安大学构建的汽车综合性能试验场等。但是,先进的交通仿真技术仍然是车队协同驾驶试验的基础与关键。目前,计算机仿真分析由传统的通过数值积分求解描述车辆性能的系统运动微分方程,转变为基于模型设计的多体系统分析软件,如机械系统动力学分析软件(Automatic Dynamic Analysis of Mechanical System, ADAMS),动力学分析和设计系统软件(Dynamic Analysis and Design System,DADS),多体系统仿真软件包(SImulation of Multibody System PACKage,SIMPACK),包括Carsim和Truck Sim的AUTOSIM(AUTOmatic SIMulation),以及Matlab/Simulink工具箱等。这样,包含上述功能的半实物仿真技术(Hardware In the Loop)也随之成为目前常用的车辆驾驶仿真手段,具体开发过程如图5所示。其中最有名的是荷兰应用科学研究机构TNO构建的基于半实物仿真的智能车辆和交通模拟试验系统VEHIL(Vehicle Hardware In the Loop),用于测试智能车辆的自适应巡航控制、启停控制、车车和车路通信、车队协同驾驶、超车以及障碍物检测等功能.此外还有德国柏林交通系统研究所(Institute of Transportation Systems)的SUMO仿真平台,美国拉斯阿莫斯国家实验室(LosAlamos National Laboratory)的TRANSIMS交通仿真平台以及麻省理工MITSIM实验室的TMS交通仿真平台。
在国内,武汉理工大学和军事交通学院相继构建了道路交通半实物仿真平台,为车队协同驾驶混成控制系统研究提供了有利的试验平台(图6~7)。
图5
图6
图7
2、车队协同驾驶混成控制系统
纵观车队协同驾驶国内外研究现状,一方面,车载传感技术、通信技术、智能计算以及车队协作策略经过多年研究取得了显着进展,大部分成果已经实用化;另一方面,研究借鉴的混成控制理论与系统建模和仿真手段也越来越成熟,为车队协同驾驶奠定了坚实的基础。
混成控制系统主要包括基于模型设计和混成自动机建模。基于模型设计是指包括整车模型、胎路模型、道路模型等设计,以及变结构控制,MPC控制,状态反馈H∞控制,LQR控制等基于模型的控制方法,借助半实物仿真可以更好地发挥其优势。此外,半实物仿真所需的各功能模块具有便捷性、耐久性及多样性特点,可以模拟相关交通状况,测试车队协同驾驶策略过程,并且无需考虑驾驶员和行人的人身安全等,与实车试验相比,更具安全性。混成自动机建模,主要包括事件描述、状态迁移、并行机制、条件动作、层次特性等,可采用State flow、UML等状态机进行建模与仿真。
因此,车队协同驾驶混成控制系统可以根据系统物理结构、信息结构以及混成控制策略3个方面进行设计。图8采用自顶向下的设计方法,设计具有协作层和物理层的混成车队群体体系结构与分散变结构的车辆个体体系结构。同时设计基于双层通信机制的信息交互模式,分别用于车队间通信和车队内通信,从而支持车队协同驾驶过程(图9)。
图8
图9
图10针对车队协同驾驶过程中存在的巡航、跟随、组合与拆分、换道等协作过程,设计了基于多模态变迁的车队混成控制策略。变迁过程主要分为首车领航、当前被控车辆与其后改变车辆三大部分。领航车从初始状态经过“启动”、“加速”动作,达到巡航状态。通过建立协作联系,当前被控车辆可以通过“跟随”、“换道”、“组合”、“拆分”等不同状态的切换,完成所需的协作策略,驶出车队或者与其后车队重新组成车队。同理,其后改变车辆根据相应的策略更新自己的状态。
图10
3、车队协同驾驶策略半实物仿真
由国内外研究现状可知,车队协同驾驶策略主要包括巡航、跟随、组合与拆分、换道5种策略。采用结合混成控制方法和半实物仿真平台的手段可以很容易实现车队协同驾驶策略仿真。这里给出车辆巡航、换道、超车及车队跟随与车道保持策略仿真,具体算法及实现过程可参考作者的博士论文和发表的相关文章.仿真1展示了单车巡航策略仿真试验。智能车速度从0m/s加速到10m/s,其速度与加速度变化如图11所示。
图11
仿真2展示了单车换道策略仿真试验。假设采用正反梯形加速度方法,利用横向加速度及其变化率、车道宽度,计算智能车换道所需时间,从而得到智能车换道轨迹(图12)。仿真3展示了单车超车策略仿真试验。假设不考虑相邻车道的车流密度,在前方车辆保持恒定车速的前提下,智能车根据与前车保持的距离和换道时间确定期望的加速度,再根据换道策略确定合适的换道轨迹,仿真过程如图13所示。
图12
图13
仿真4展示了车队跟随策略仿真试验。假设一列由5辆车组成的车队具有相同的车辆控制参数。首车以2m/s2的加速度,从0m/s加速到30m/s,然后再以-2m/s2的加速度,从30m/s减速到10m/s.相应的车间距,速度以及加速度变化的仿真结果如图14所示。
图14
仿真5展示了车队车道保持策略仿真试验。假设同一车道前后两辆车在弯道上行驶,且弯道的曲率已知。根据道路曲率变化,前车确定期望的行驶状态,后车通过跟踪前车行驶状态信息,实现车队的车道保持策略,仿真过程如图15所示。
图15
4、结论与展望
本文对智能车路系统中车队协同驾驶研究进行了综述。车队协同驾驶是智能车路系统自动化与集群化的体现,是智能交通系统的终极发展目标。混成系统理论和半实物仿真是研究车队协同驾驶的重要手段。然而,由于车队协同驾驶技术受到车载设备、协作策略、车车通信介质与协议以及试验场景等应用条件的限制,车队协同驾驶在以下几个方面正面临挑战。
(1)如何开发车路协同环境下的车队协同驾驶系统。虽然目前的车队协同驾驶系统结构已日趋完善,但是对于系统开发与功能实现还处于试验阶段。车队支持信息的采集,车车/车路信息交互,以及系统硬软件的测试还需要进一步开展。
(2)如何模拟车路协同环境下的车队协同驾驶过程。车路协同环境下的车队协同驾驶过程与普通道路系统中以人为主的车队形成过程机理上有很大的不同,不仅需要对车队协同行驶动力学进行建模,还需要考虑通信环节、道路条件等离散事件系统对车队连续动力学系统的影响,因此需要对事件驱动下的车队协作状态变迁过程进行建模。同时,车队协同驾驶过程中存在许多随机和不确定性因素,这些因素对车队协同驾驶稳定性的影响尚需分析。
(3)如何构建试验平台及测试场地来验证车队协同驾驶控制器的有效性和稳定性。目前针对车队不同的协作策略,已采用了诸多经典控制算法和智能控制算法设计车队协同行驶控制器,如PID控制、滑模控制、自适应控制、神经网络、模糊控制、MPC方法等。然而,上述相关研究大多数是从系统仿真的角度,采用物理、数学或半实物仿真技术展开的。考虑到车载设备、协作策略、车车通信协议以及测试场景等相关因素,很难开展实车道路试验。
因此围绕构建的试验平台及测试场地,制定车队协同驾驶测试方案就显得至关重要。比如系统评价指标应考虑车车通信的距离、数据传输速率,车队协同驾驶的速度、车间距和车道偏离距离等。车队协同驾驶过程中,车载传感器或车车通信引发的信息延迟,道路场景改变引起的系统参数变化,以及这两方面相互作用,对车队稳定性乃至交通流稳定性的影响,必须依照不同情况进行测试。(图标略)





