随着电网规模的不断扩大,智能电网技术得到了长足发展。同时,随着人工智能技术的不断进步,机器人巡检技术在变电站中广泛应用,机巡为主、人机结合未来将成为变电站巡检的趋势。本文对智能巡检机器人技术及应用场景进行了介绍,并对智能巡检机器人在变电站应用中存在典型问题进行了分析,提出了解决办法。
随着经济的飞速发展,我国电网不断扩大,变电站数量和设备数量急剧增长。电力体制改革进一步进入深水区,随着集中控制及运检一体化工作的推进,变电站进入无人值班模式。传统的人工巡检方式已经不满足新的形势需要,存在着许多难以克服的问题:
(1)衡量尺度问题:运行经验是确保电力设备安全运行的一种技能,但运行经验的积累过程具有单一性和时效性。人员一旦变动,就可能造成经验流失,新的人员要积累经验需要一个长期的过程。经验的缺乏造成了对运行设备状态掌握难度的增加。
(2)原始数据积累问题:由于设备运行状态的原始数据和信息的积累不足,对事故的预防及排除无法提供有用的辅助性资料。
(3)劳动强度及人工成本问题:随着变电站集控及运检一体化工作的推进,运行值班员人员将减少,设备巡视的劳动强度将增加,巡视周期虽然被优化,但也造成设备出现突发状况起初时不能及时发现并采取有效措施,等设备告警或跳闸时才发现,已经错过了最好的处理时机。
采用智能机器人技术对变电站进行巡检,在具备智能性和灵活性的同时也克服和弥补了人工巡检的不足之处,既提升了变电巡检作业的智能化水平,又避免了因巡视人员技能差、经验不足、责任心不强等问题,更适应变电站无人化的实际需求,具有广阔的发展空间和应用前景。
1 智能巡检机器人系统构架
变电站智能巡检机器人系统构架为分层式构架,由后台管理系统层和前端移动站系统层组成,如图1所示。
1.1 后台管理系统
后台管理系统层主要由后台监控终端、交换机、无线AP及环境采集单元等组成,无线AP用于与机器人前端系统进行通信。后台监控终端监控系统基于Windows或linnux系统,通过面向对象编程语言开发设计,为用户提供友好的交互操作界面,实现人机交互,实现机器人监视控制功能,采集机器人运行状态、当前位置及环境信息,向机器人下达工作任务及路径规划,实时显示机器人当前采集的可见光图像和红外图像及分析处理结果。对机器人采集数据进行存储,并可方便查询历史数据进行多维度分析。
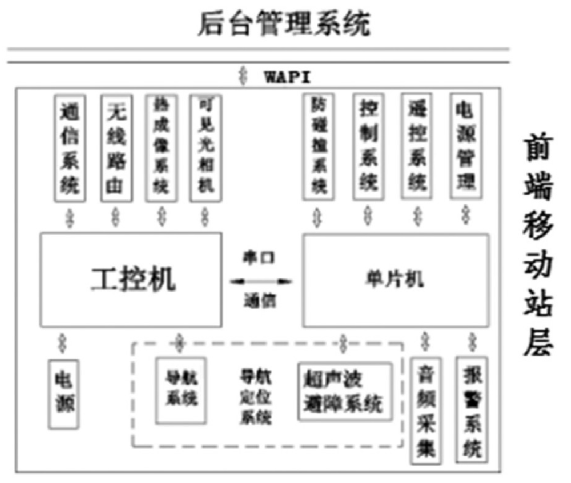
图1 智能巡检机器人系统构架
1.2 前端移动站系统层
前端移动站系统层包括机器人本体模块和相关检测控制模块,主要由导航避障系统、检测系统、电源系统、通信系统、控制系统以及运动系统六部分组成。前端移动站系统是智能巡检机器人的移动载体和信息采集载体,主要负责导航定位信息的采集和处理,按照预先设好的工作任务自动规划巡视路径,并自主完成巡检任务,移动至预设点位后完成定位校准、采集可见光图像和红外图像采集,读书识别等工作,并将采集的数据上传至后台管理系统。巡视任务完成后机器人自动返回充电房充电,在巡视过程中遇到障碍物时自动停车并报警,障碍消除后自行前进。机器人前方一般安装有2-4个超声波传感器,超声波传感器采集机器人行走路线上的障碍信息,以IO的形式上传到运动控制模块,并根据控制模式判断是否停车,实现机器人的自动避障功能。
2 机器人巡检常用场景
智能巡检机器人主要用于对变电站室外高压设备开展红外热成像监测、可见光视频拍摄、仪表图像识别、声音识别等巡检任务,及时发现设备缺陷,并提醒变电站运行人员,具有智能性、客观性、灵活性、安全性、集成度高等特点。
2.1 日常巡检
变电站智能机器人按照设定的任务自主对变电站设备进行巡检,主要进行表计识别读取、设备状态检查、噪声监测、红外测温等工作,工作智能化、检测方式多样化、巡检工作标准化。智能机器人巡检系统能够对巡检全过程进行管理,实现巡视路线、时间、巡视设备、报表管理于一体,并能够为运行人员提供数据分析与决策支持。有效的克服了传统的人工巡检劳动强度大、工作效率低、检测质量分散、手段单一等缺点。
2.2 特殊巡检
机器人能够替代运维人员实现在恶劣天气下对设备自主巡检,如高温、大风、大雾、冰雪、冰雹、雷雨等特殊工况下的巡检,有效降低工作人员在恶劣天气户外作业的安全风险。
2.3 实现一键顺控等特殊功能功能
智能机器人巡检系统与站内监控系统联动,过机器人与监控系统联动配合,机器人可以对设备状态进行自动检查,实现一键顺控功能。也自动可对设备遥信告警进行现场确认,比如当变电站监控系统出现设备压力低、温度越限等告警时,机器人可根据告警内容自动导航至现场核实并发送检查结果给运维人员。
2.4 远程指导与应急指挥
远程工程师可以操控机器人到达作业现场,同步观看当前施工作业现场实况,并通过语音对讲功能对作业过程进行指导,确保作业流程的规范性、安全性。同时机器人也可应用于应急指挥、安全督察等应用场景。
2.5 机器人集中控制管理
电网公司可在公司总部设置智能机器人集控中心对公司管辖的多个变电站机器人进行集中控制和统一管理,统一巡检模式及巡检标准,实现机器人巡检作业标准化管理,同时将机器人巡检数据进行大数据分析,及时掌握设备运行状况。
2.6 降低运维人员劳动强度
综合统计表明在传统人工巡检模式下,运维人员每天通过人工巡检对设备巡视检查、红外测温用时约3h,每年则需要1080h,采用机器人巡视后,值班员每月开展一次核对性巡视即可,每年用于巡视时间为36h,减少了1044h,大大降低了运维人员劳动强度。
3 变电站巡检器人应用中存在问题及解决对策
3.1 对站内电缆沟盖板及巡视小道的破坏
受变电站内设备及环境限制,机器人巡检时需要在变电站电缆沟盖板上行走,目前常用的变电站巡检机器人重量在80kg以上,长期在电缆沟盖板行走会造成电缆沟盖板损坏甚至机器人掉入电缆沟压坏电缆造成设备故障。
解决办法:合理规划机器人巡检路线,尽量避免走电缆沟盖板,如因条件所限必须从电缆沟盖板穿越时,在穿越处电缆沟盖板上覆盖钢板保护。在新变电站规划设计时,将机器人巡检道路纳入设计中综合考虑。
3.2 无线通信保密性不高
目前变电站巡检机器人与监控主站常用的通信方式为WIFI无线网桥传输,不满足变电站网络安全要求,在保供电时因停用无线网络导致机器人无法运行。
解决办法:加装加密通信模块,采用支持WAPI无线标准或230MHz电力无线专网通信模组通信。
3.3 机器人轮胎磨损过快
目前的变电站巡检机器人多用四驱方式,机器人原地转向时轮胎磨损严重,会造成定位偏移及巡检脱轨,某省公司42台机器人一年由于轮胎导致的故障占总故障数的18.6%。
解决办法:将机器人由四轮驱动改为两轮驱动,转向方式由四轮原地转向改为两轮原地转向;将真空胎更换为添加耐磨材料镂空实心胎,合理规划巡检路径,减少原地转向次数,定期对机器人轮胎磨损情况进行评估,及时更换。
3.4 机器人续航能力不足
机器人充电时间需6-8h,满电续航时间8h,由于500k V及以上变电站设备多,占地面积大,一台巡检机器人完成一次全站巡检需要3天时间。
解决办法:进行电池材料及快速充电技术研究,提升电池容量及充电速度;开展机器人自动换电池技术研究,通过机器人自动快速更换电池来提升续航能力。
3.5 机器人巡视存在盲区
由于受设备布置、安全距离及机器人自身体积限制,机器人巡视存在盲区,部分巡视点无法覆盖,500k V变电站机器人巡视盲点在5%左右。
解决办法:通过调整表计朝向、增加反光镜,盲区增加专用摄像头等手段可有效解决巡视盲区问题。
结束语:电站智能巡检机器人能在一定程度上代替人工巡检,有效降低运维人员设备巡视强度和安全风险,不但提高了变电巡检作业的自动化和智能化水平,还改善了因巡视人员业务水平差、经验不足、责任心不强、现场环境等原因不能及时发现设备缺陷的问题,为智能变电站和无人值守变电站提供了新型的技术检测手段和安全保障,更快的推进了500k V变电站无人值班的进程。随着人工智能技术的不断进步,智能机器人巡检系统在电网中有着越来越广阔的应用前景。





